1.本发明涉及环境监测技术领域,尤其涉及一种湖泊生态环境监测系统及方法。
背景技术:
2.随着社会的发展和人们对生活健康的关注,加上水资源的日益短缺和恶化,湖泊环境问题备受关注,现有的对湖泊生态系统健康的评价通常只是根据测得的某些重点指标来对湖泊生态状况进行研判,而这些重点指标的检测一般通过人工测量分析,不仅效率低成本高,而且难以按照理论最优模型对被测区域中的整体情况进行有效的实时监控。
技术实现要素:
3.本发明为了解决上述技术问题,提供了一种湖泊生态环境监测系统及方法,其能够实时在线监测湖泊生态环境数据,判断当前湖泊生态环境健康状态。
4.为了解决上述问题,本发明采用以下技术方案予以实现:
5.本发明的一种湖泊生态环境监测系统,包括遥控无人船和遥控终端,所述遥控无人船包括船体,所述船体上设有控制器、电源模块、gps模块、无线通信模块、数据采集模块以及驱动船体移动的动力组件,所述控制器分别与电源模块、gps模块、无线通信模块、数据采集模块、动力组件电连接,所述无线通信模块能够与遥控终端无线通信,所述数据采集模块包括用于检测湖泊空气负氧离子浓度的负氧离子传感器s1、用于检测湖泊轻颗粒物浓度的轻颗粒物传感器s2、用于检测湖泊水温的水温传感器s3、用于检测湖泊重颗粒物浓度的重颗粒物传感器s4、用于检测湖泊ph值的ph传感器s5、用于检测湖泊溶氧量的溶氧传感器s6、用于检测湖泊水体电导率的水体电导率传感器s7、用于检测湖泊氨氮含量的氨氮传感器s8、用于检测湖泊噪音的声音传感器s9、用于检测湖泊紫外线辐射量的紫外辐射传感器s10。
6.在本方案中,工作人员通过遥控终端控制遥控无人船移动到监测点,遥控无人船上的数据采集模块采集数据并发送到控制器,控制器对所有数据进行综合分析处理,判断当前湖泊生态环境健康状态,并将判断结果发送到遥控终端,工作人员可通过遥控终端查看判断结果。还可通过遥控终端发送指令给遥控无人船,指令遥控无人船在gps模块的辅助下移动到多个不同的监测点进行监测。
7.本发明的一种湖泊生态环境监测方法,用于上述的一种湖泊生态环境监测系统,包括以下步骤
8.s1:负氧离子传感器s1输出检测数据d
s1
(t)到控制器,轻颗粒物传感器s2输出检测数据d
s2
(t)到控制器,水温传感器s3输出检测数据d
s3
(t)到控制器,重颗粒物传感器s4输出检测数据d
s4
(t)到控制器,ph传感器s5输出检测数据d
s5
(t)到控制器,溶氧传感器s6输出检测数据d
s6
(t)到控制器,水体电导率传感器s7输出检测数据d
s7
(t)到控制器,氨氮传感器s8输出检测数据d
s8
(t)到控制器,声音传感器s9输出检测数据d
s9
(t)到控制器,紫外辐射传感器s10输出检测数据d
s10
(t)到控制器,t为时间
9.s2:控制器将检测数据d
s1
(t)、d
s2
(t)、d
s3
(t)、d
s4
(t)、d
s5
(t)、d
s6
(t)、d
s7
(t)、d
s8
(t)、d
s9
(t)、d
s10
(t)分别进行归一化处理,归一化到[1,10]区间内,得到对应的归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t)、l
s8
(t)、l
s9
(t)、l
s10
(t);
[0010]
s3:控制器根据归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t)、l
s8
(t)、l
s9
(t)、l
s10
(t)计算出对应的特征值en
s1
、en
s2
、en
s3
、en
s4
、en
s5
、en
s6
、en
s7
、en
s8
、en
s8
、en
s9
、en
s10
,并计算出生态环境评价参数senk;
[0011]
s4:控制器每隔n秒计算一次生态环境评价参数senk的平均值senka、en
s5
的平均值ena
s5
、en
s8
的平均值ena
s8
;
[0012]
当senka≥w1且ena
s5
、ena
s8
都位于设定范围内时,判断当前生态环境为优等;
[0013]
当w2<senka<w1且ena
s5
、ena
s8
都位于设定范围内时,判断当前生态环境为中等;
[0014]
当senka≤w2或ena
s5
、ena
s8
中任意一个超出设定范围时,判断当前生态环境为差等。
[0015]
在本方案中,负氧离子传感器s1、轻颗粒物传感器s2、水温传感器s3、重颗粒物传感器s4、ph传感器s5、溶氧传感器s6、水体电导率传感器s7、氨氮传感器s8、声音传感器s9、紫外辐射传感器s10监测湖泊生态环境的十种数据,输送到控制器,控制器经过对数据进行处理分析计算出综合评价生态环境健康状态的参数senka,结合对湖泊环境影响较大的ph值、氨氮含量,综合判断湖泊生态环境健康状态。
[0016]
作为优选,所述步骤s3包括以下步骤:
[0017]
s31:将归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t)、l
s8
(t)、l
s9
(t)、l
s10
(t)分别作为输入信号x(t)代入湖泊生态判别模型,计算出对应的特征值en
s1
、en
s2
、en
s3
、en
s4
、en
s5
、en
s6
、en
s7
、en
s8
、en
s8
、en
s9
、en
s10
;
[0018]
归一化数据l
si
(t)作为输入信号x(t)代入湖泊生态判别模型计算出对应的特征值en
si
的方法如下,i=1
‑
10:
[0019]
将l
si
(t)作为输入信号x(t)代入森林生态判别模型
[0020][0021][0022]
其中,p(y)为负载系统,b(t)为激励信号,y为湖泊生态判别模型的动态参数,c、a、b、g为参数,t为时间,cos(2πft)为输入信号的频率分量,f是频率,m为激励信号b(t)的信号强度;
[0023]
从小到大调节g的值,公式(1)、公式(2)向跃迁条件逼近,当公式(1)、公式(2)中任意一个公式达到跃迁状态时,停止调节g,将当前g的值记录为g
si
,得到湖泊生态判别模型的特征曲线fedp
si
:
[0024][0025]
取特征曲线fedp
si
的最大值f1和最小值f2,特征值en
si
=f1
‑
f2;
[0026]
s32:将en
s1
作为负氧离子传感器s1的响应特征信号值,将作为轻颗粒物传感器s2的响应特征信号值,将en
s3
作为水温传感器s3的响应特征信号值,将作为重颗粒物传感器s4的响应特征信号值,将en
s5
作为ph传感器s5的响应特征信号值,将en
s6
作为溶氧传感器s6的响应特征信号值,将en
s7
作为水体电导率传感器s7的响应特征信号值,将en
s8
作为氨氮传感器s8的响应特征信号值,将en
s9
作为声音传感器s9的响应特征信号值,将en
s10
作为紫外辐射传感器s10的响应特征信号值;
[0027]
以每个传感器的响应特征信号作为该传感器的响应轴在平面上绘制一个具有10个传感器响应轴的多轴矢量图,所有传感器响应轴的原点为同一点,传感器sn响应轴与传感器s(n 1)响应轴之间的夹角为36度,n=1,2
……
9;
[0028]
根据传感器s1、传感器s2、传感器s4、传感器s6、传感器s7对应的响应特征信号值en
s1
、en
s6
、en
s7
在对应的传感器响应轴上标注出相应的响应点,其余传感器对应的响应特征信号值设定为0.25并在对应的传感器响应轴上标注出相应的响应点,将相邻传感器响应轴上标注出来的响应点通过直线连接围成一个封闭空间a1,计算出围成的封闭空间的面积之和sa1;
[0029]
根据传感器s3、传感器s9、传感器s10对应的响应特征信号值en
s3
、en
s9
、en
s10
在对应的传感器响应轴上标注出相应的响应点,其余传感器对应的响应特征信号值设定为0.25并在对应的传感器响应轴上标注出相应的响应点,将相邻传感器响应轴上标注出来的响应点通过直线连接围成一个封闭空间a2,计算出围成的封闭空间的面积之和sa2;
[0030]
计算生态环境评价参数senk=sa1
‑
sa2。
[0031]
作为优选,所述ena
s5
的设定范围为ena
s5
<1.1,所述ena
s8
的设定范围为1.2≤ena
s8
<3.2。
[0032]
本发明的有益效果是:能够实时在线监测湖泊生态环境数据,判断当前湖泊生态环境健康状态,提高了监测效率。
附图说明
[0033]
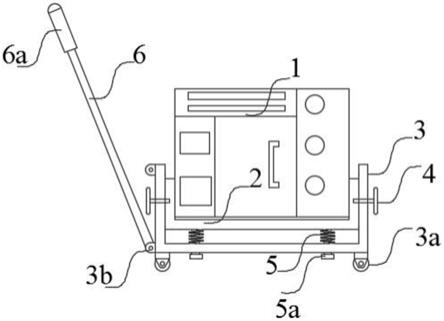
图1是实施例的结构示意图;
[0034]
图2是遥控无人船的电路原理连接框图;
[0035]
图3是特征曲线的示意图;
[0036]
图4是传感器的响应特征信号值在多轴矢量图围成封闭空间a1的示意图;
[0037]
图5是传感器的响应特征信号值在多轴矢量图围成封闭空间a2的示意图。
[0038]
图中:1、遥控无人船,2、遥控终端,3、控制器,4、电源模块,5、gps模块,6、无线通信模块,7、数据采集模块,8、动力组件。
具体实施方式
[0039]
下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
[0040]
实施例:本实施例的一种湖泊生态环境监测系统,如图1、图2所示,包括遥控无人船1和遥控终端2,遥控无人船1包括船体,船体上设有控制器3、电源模块4、gps模块5、无线
通信模块6、数据采集模块7以及驱动船体移动的动力组件8,控制器3分别与电源模块4、gps模块5、无线通信模块6、数据采集模块7、动力组件8电连接,无线通信模块6能够与遥控终端2无线通信,数据采集模块7包括用于检测湖泊空气负氧离子浓度的负氧离子传感器s1、用于检测湖泊轻颗粒物浓度的轻颗粒物传感器s2、用于检测湖泊水温的水温传感器s3、用于检测湖泊重颗粒物浓度的重颗粒物传感器s4、用于检测湖泊ph值的ph传感器s5、用于检测湖泊溶氧量的溶氧传感器s6、用于检测湖泊水体电导率的水体电导率传感器s7、用于检测湖泊氨氮含量的氨氮传感器s8、用于检测湖泊噪音的声音传感器s9、用于检测湖泊紫外线辐射量的紫外辐射传感器s10。
[0041]
在本方案中,工作人员通过遥控终端控制遥控无人船移动到监测点,遥控无人船上的数据采集模块采集数据并发送到控制器,控制器对所有数据进行综合分析处理,判断当前湖泊生态环境健康状态,并将判断结果发送到遥控终端,工作人员可通过遥控终端查看判断结果。还可通过遥控终端发送指令给遥控无人船,指令遥控无人船在gps模块的辅助下移动到多个不同的监测点进行监测。
[0042]
本实施例的一种湖泊生态环境监测方法,用于上述的一种湖泊生态环境监测系统,包括以下步骤
[0043]
s1:负氧离子传感器s1输出检测数据d
s1
(t)到控制器,轻颗粒物传感器s2输出检测数据d
s2
(t)到控制器,水温传感器s3输出检测数据d
s3
(t)到控制器,重颗粒物传感器s4输出检测数据d
s4
(t)到控制器,ph传感器s5输出检测数据d
s5
(t)到控制器,溶氧传感器s6输出检测数据d
s6
(t)到控制器,水体电导率传感器s7输出检测数据d
s7
(t)到控制器,氨氮传感器s8输出检测数据d
s8
(t)到控制器,声音传感器s9输出检测数据d
s9
(t)到控制器,紫外辐射传感器s10输出检测数据d
s10
(t)到控制器,t为时间
[0044]
s2:控制器将检测数据d
s1
(t)、d
s2
(t)、d
s3
(t)、d
s4
(t)、d
s5
(t)、d
s6
(t)、d
s7
(t)、d
s8
(t)、d
s9
(t)、d
s10
(t)分别进行归一化处理,归一化到[1,10]区间内,得到对应的归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t)、l
s8
(t)、l
s9
(t)、l
s10
(t);
[0045]
s3:控制器根据归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t)、l
s8
(t)、l
s9
(t)、l
s10
(t)计算出对应的特征值en
s1
、en
s2
、en
s3
、en
s4
、en
s5
、en
s6
、en
s7
、en
s8
、en
s8
、en
s9
、en
s10
,并计算出生态环境评价参数senk;
[0046]
步骤s3包括以下步骤:
[0047]
s31:将归一化数据l
s1
(t)、l
s2
(t)、l
s3
(t)、l
s4
(t)、l
s5
(t)、l
s6
(t)、l
s7
(t)、l
s8
(t)、l
s9
(t)、l
s10
(t)分别作为输入信号x(t)代入湖泊生态判别模型,计算出对应的特征值en
s1
、en
s2
、en
s3
、en
s4
、en
s5
、en
s6
、en
s7
、en
s8
、en
s8
、en
s9
、en
s10
;
[0048]
归一化数据l
si
(t)作为输入信号x(t)代入湖泊生态判别模型计算出对应的特征值en
si
的方法如下,i=1
‑
10:
[0049]
将l
si
(t)作为输入信号x(t)代入森林生态判别模型
[0050][0051]
[0052]
其中,p(y)为负载系统,b(t)为激励信号,y为湖泊生态判别模型的动态参数,c、a、b、g为参数,t为时间,cos(2πft)为输入信号的频率分量,f是频率,m为激励信号b(t)的信号强度;
[0053]
从小到大调节g的值,公式(1)、公式(2)向跃迁条件逼近,当公式(1)、公式(2)中任意一个公式达到跃迁状态时,停止调节g,将当前g的值记录为g
si
,得到湖泊生态判别模型的特征曲线fedp
si
:
[0054][0055]
特征曲线fedp
si
如图3所示,取特征曲线fedp
si
的最大值f1和最小值f2,特征值en
si
=f1
‑
f2;
[0056]
s32:将en
s1
作为负氧离子传感器s1的响应特征信号值,将作为轻颗粒物传感器s2的响应特征信号值,将en
s3
作为水温传感器s3的响应特征信号值,将作为重颗粒物传感器s4的响应特征信号值,将en
s5
作为ph传感器s5的响应特征信号值,将en
s6
作为溶氧传感器s6的响应特征信号值,将en
s7
作为水体电导率传感器s7的响应特征信号值,将en
s8
作为氨氮传感器s8的响应特征信号值,将en
s9
作为声音传感器s9的响应特征信号值,将en
s10
作为紫外辐射传感器s10的响应特征信号值;
[0057]
以每个传感器的响应特征信号作为该传感器的响应轴在平面上绘制一个具有10个传感器响应轴的多轴矢量图,所有传感器响应轴的原点为同一点,传感器sn响应轴与传感器s(n 1)响应轴之间的夹角为36度,n=1,2
……
9;
[0058]
根据传感器s1、传感器s2、传感器s4、传感器s6、传感器s7对应的响应特征信号值en
s1
、en
s6
、en
s7
在对应的传感器响应轴上标注出相应的响应点,其余传感器对应的响应特征信号值设定为0.25并在对应的传感器响应轴上标注出相应的响应点,将相邻传感器响应轴上标注出来的响应点通过直线连接围成一个封闭空间a1,如图4所示,计算出围成的封闭空间的面积之和sa1;
[0059]
根据传感器s3、传感器s9、传感器s10对应的响应特征信号值en
s3
、en
s9
、en
s10
在对应的传感器响应轴上标注出相应的响应点,其余传感器对应的响应特征信号值设定为0.25并在对应的传感器响应轴上标注出相应的响应点,将相邻传感器响应轴上标注出来的响应点通过直线连接围成一个封闭空间a2,如图5所示,计算出围成的封闭空间的面积之和sa2;
[0060]
计算生态环境评价参数senk=sa1
‑
sa2;
[0061]
s4:控制器每隔n秒计算一次生态环境评价参数senk的平均值senka、en
s5
的平均值ena
s5
、en
s8
的平均值ena
s8
;
[0062]
当senka≥0.8且ena
s5
<1.1且1.2≤ena
s8
<3.2时,判断当前生态环境为优等;
[0063]
当0.2<senka<0.8且ena
s5
<1.1且1.2≤ena
s8
<3.2时,判断当前生态环境为中等;
[0064]
当senka≤0.2或ena
s5
≥1.1或ena
s8
<1.2或ena
s8
≥3.2时,判断当前生态环境为差等。
[0065]
在本方案中,负氧离子传感器s1、轻颗粒物传感器s2、水温传感器s3、重颗粒物传感器s4、ph传感器s5、溶氧传感器s6、水体电导率传感器s7、氨氮传感器s8、声音传感器s9、紫外辐射传感器s10监测湖泊生态环境的十种数据,输送到控制器,控制器经过对数据进行处理分析计算出综合评价生态环境健康状态的参数senka,结合对湖泊环境影响较大的ph值、氨氮含量,综合判断湖泊生态环境健康状态。
[0066]
负氧离子传感器s1检测的是湖泊空气负氧离子信息,溶氧传感器s6检测的是湖泊溶氧量信息,水体电导率传感器s7检测的是湖泊水体电导率信息,这几个传感器的检测信号越大,代表湖泊的生态环境越好;轻颗粒物传感器s2检测的是湖泊轻颗粒物浓度信息,重颗粒物传感器s4检测的是湖泊重颗粒物浓度信息,其检测指标与生态息息相关但又成反比关系;水温传感器s3检测的是湖泊水温信息,声音传感器s9检测的是湖泊噪音信息,紫外辐射传感器s10检测的是湖泊紫外线辐射量信息,这几个生态指标对湖泊的生态环境起到破坏作用,因此其检测值越低,湖泊的生态环境就越好。而ph传感器s5、氨氮含量的氨氮传感器s8并不是在其最大值或者最小值区间内决定生态环境好不好,而是在某个区间内对生态环境评价产生影响,因此做单独判断。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。