1.本发明涉及管道泄漏检测技术领域,具体涉及一种基于坐标转换的负压波信号拐点定位方法及系统。
背景技术:
2.管道是油气资源最重要的输送方式,但是在第三方破坏、自身老化、腐蚀等因素作用下,管道难免会产生泄漏,进而引起更为严重的事故,对管道的安全运营造成了严重威胁,因此检测管道泄漏并定位泄漏点具有重要意义。
3.在多种泄漏检测和定位方法中,基于负压波的方法由于简单有效,反应速度快,适用于长输管道等优点,被广泛关注。能有效地识别负压波拐点出现的时间是应用负压波进行泄漏定位的关键,对于提高泄漏定位精度意义重大。对于负压波拐点定位的方法中,以小波变换等方法通过奇异值检测寻找负压波拐点,在进行了奇异值分析后,还需要通过判断奇异值出现的位置来确定负压波拐点的发生时间,由于增加了一次计算,所以将导致误差的增大,导致管道泄漏定位精度不够理想。
4.因此,亟待提供一种提高管道泄漏定位精度的解决方案。
技术实现要素:
5.本发明目的在于提供一种基于坐标转换的负压波信号拐点定位方法及系统,以解决现有技术中所存在的一个或多个技术问题,至少提供一种有益的选择或创造条件。
6.为了实现上述目的,本发明提供以下技术方案:
7.一种基于坐标转换的负压波信号拐点定位方法,所述方法包括以下步骤:
8.接收传感器采集到的检测信号,根据所述检测信号建立信号时程曲线;其中,所述检测信号包括多个离散的信号点;
9.若确定管道发生泄漏,则根据所述信号时程曲线划分得到平稳段和下降段;
10.在所述平稳段选取任一点作为起始点a,在所述下降段选取任一点作为结束点b,分别确定起始点a和结束点b所对应的坐标;
11.从所述信号时程曲线中截取起始点a和结束点b之间的曲线,作为第一曲线;
12.将所述第一曲线进行旋转,得到第二曲线,确定所述第二曲线中每个信号点的坐标;
13.利用求极值的方法,定位所述第二曲线中的极值点,该极值点即为原负压波信号的拐点,计算该极值点在所述第一曲线中所对应的时间,作为拐点出现的时间;
14.其中,所述极值点为最大值点或者最小值点。
15.进一步,所述接收传感器采集到的检测信号,根据所述检测信号建立信号时程曲线,包括:
16.接收传感器采集到的检测信号;
17.确定所述检测信号中每个信号点的信号值、以及与所述信号值对应的采集时间;
18.建立直角坐标系,确定所述检测信号中每个信号点在所述直角坐标系中的坐标;所述直角坐标系的横坐标为时间,所述直角坐标系的纵坐标为信号值;
19.将所述检测信号中的每个信号点通过连线形成信号时程曲线。
20.进一步,所述若确定管道发生泄漏,则根据所述信号时程曲线划分得到平稳段和下降段,包括:
21.确定第一阈值,所述第一阈值为管道正常状态下多个检测信号值的平均值;
22.按时间顺序从信号时程曲线中依次选取一段连续数量的信号点,当确定所述连续数量的信号点的信号值均低于第一阈值时,则将低于第一阈值的第一个信号点之前的信号时程曲线划分为平稳段;
23.按时间顺序继续从信号时程曲线中依次选取一段连续数量的信号点,当确定所述连续数量的信号点的信号值均低于第二阈值时,则将低于第二阈值的第一个信号点之后信号时程曲线划分为下降段;其中,所述第二阈值小于第一阈值。
24.进一步,所述确定所述第二曲线中每个信号点的坐标,包括:
25.确定第一信号点的坐标值,作为第一坐标值;其中,所述第一信号点为所述第一曲线中的信号点;
26.利用坐标转化公式对第一坐标值进行运算,得到第二坐标值;其中,所述第二坐标值为第二信号点的坐标,所述第二信号点为第二曲线中与所述第一信号点对应的信号点。
27.进一步,所述坐标转化公式为:
28.t
′
i
=t
i
cosa y
i
sina,y
′
i
=y
i
cosa
‑
t
i
sina;
29.其中,(t
i
,y
i
)为第一坐标值,(t'
i
,y'
i
),a为旋转角度。
30.一种计算机可读存储介质,所述计算机可读存储介质上存储有基于坐标转换的负压波信号拐点定位程序,所述基于坐标转换的负压波信号拐点定位程序被处理器执行时实现如上述任意一项所述的基于坐标转换的负压波信号拐点定位方法的步骤。
31.一种基于坐标转换的负压波信号拐点定位系统,所述终端包括:
32.至少一个处理器;
33.至少一个存储器,用于存储至少一个程序;
34.当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述任一项所述的基于坐标转换的负压波信号拐点定位方法。
35.本发明的有益效果是:本发明公开一种基于坐标转换的负压波信号拐点定位方法及系统,仅通过简单的曲线旋转就能计算负压波拐点出现的时间。本发明原理简单,计算精度以及效率高,适合实时自动化监测过程中应用。
附图说明
36.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
37.图1是本发明实施例中基于坐标转换的负压波信号拐点定位方法的流程示意图;
38.图2是本发明实施例中信号时程曲线的示意图;
39.图3是本发明实施例中第二曲线的示意图。
具体实施方式
40.以下将结合实施例和附图对本技术的构思、具体结构及产生的技术效果进行清楚、完整的描述,以充分地理解本技术的目的、方案和效果。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。
41.参考图1,如图1所示为本技术实施例提供的一种基于坐标转换的负压波信号拐点定位方法,所述方法包括以下步骤:
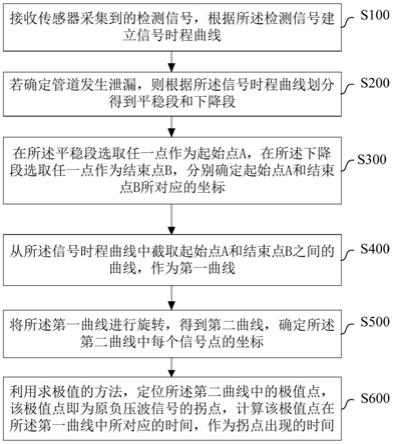
42.步骤s100、接收传感器采集到的检测信号,根据所述检测信号建立信号时程曲线;
43.其中,所述检测信号包括多个离散的信号点;
44.步骤s200、若确定管道发生泄漏,则根据所述信号时程曲线划分得到平稳段和下降段;
45.步骤s300、在所述平稳段选取任一点作为起始点a,在所述下降段选取任一点作为结束点b,分别确定起始点a和结束点b所对应的坐标;
46.本实施例中,所述起始点a所对应的坐标包括起始点a的时间点和信号值,所述结束点b所对应的坐标包括结束点b的时间点和信号值。
47.步骤s400、从所述信号时程曲线中截取起始点a和结束点b之间的曲线,作为第一曲线;
48.步骤s500、将所述第一曲线进行旋转,得到第二曲线,确定所述第二曲线中每个信号点的坐标;
49.可以理解,由于泄漏的速率不同将导致曲线衰减的斜率不同,具体如何旋转曲线得到最高点或者最低点需要根据信号下降速率确定;本步骤中,将所述第一曲线进行旋转,即,将所述第一曲线中的每个信号点进行坐标转换,得到所述第二曲线中每个信号点的坐标;可以理解,所述第二曲线中的拐点位于坐标系中的最高点或最低点;
50.步骤s600、利用求极值的方法,定位所述第二曲线中的极值点,该极值点即为原负压波信号的拐点,计算该极值点在所述第一曲线中所对应的时间,作为拐点出现的时间;
51.其中,所述极值点为最大值点或者最小值点。
52.在一个优选的实施例中,所述检测信号包括管道泄漏所产生的压力信号或者管壁的环向应变信号;通过在管道的不同位置设置传感器,可以采集到管道上不同位置的检测信号;
53.如图2和图3所示,根据旋转以后图像的形态,利用求极值的方法,定位旋转后的图像的最大值点,该最大值点即为原负压波信号的拐点,计算该最大值点在图像旋转前的时间,该时间即为拐点出现的时间t
i
。
54.需要说明的是,负压波出现之前,管道内压力或者管壁环向应变信号保持稳定;负压波出现之后,相关信号会出现突然衰减,对于这一类信号,常规的求极值的方法无法捕捉负压波;本发明通过对可能出现负压波拐点的区间进行截取,采用坐标转换的方式对信号进行旋转,可以直接、快速的确定负压波拐点。
55.在一个优选的实施例中,所述步骤s100包括:
56.步骤s110、接收传感器采集到的检测信号;
57.步骤s120、确定所述检测信号中每个信号点的信号值、以及与所述信号值对应的采集时间;
58.步骤s130、建立直角坐标系,确定所述检测信号中每个信号点在所述直角坐标系中的坐标;所述直角坐标系的横坐标为时间,所述直角坐标系的纵坐标为信号值;
59.步骤s140、将所述检测信号中的每个信号点通过连线形成信号时程曲线。
60.可以理解,传感器采集到的检测信号为离散信号,为便于后续处理,将离散的检测信号通过连线,获得图2所示信号时程曲线。
61.在一个优选的实施例中,所述步骤s200包括:
62.步骤s210、确定第一阈值,所述第一阈值为管道正常状态下多个检测信号值的平均值;
63.具体地,在管道发生泄漏前采集管道正常状态下的多个检测信号值,计算多个检测信号值的平均值,将该均值设置为第一阈值;
64.步骤s220、按时间顺序从信号时程曲线中依次选取一段连续数量的信号点,当确定所述连续数量的信号点的信号值均低于第一阈值时,则将低于第一阈值的第一个信号点之前的信号时程曲线划分为平稳段;
65.可以理解,若没有连续的、一定数量的检测信号低于第一阈值,则认为该检测信号处于平稳段;当确定所述连续数量的检测信号值均低于第一阈值时,则确定管道发生泄漏;
66.步骤s230、按时间顺序继续从信号时程曲线中依次选取一段连续数量的信号点,当确定所述连续数量的信号点的信号值均低于第二阈值时,则将低于第二阈值的第一个信号点之后信号时程曲线划分为下降段;其中,所述第二阈值小于第一阈值。
67.在本实施例中,根据管道正常运行时检测信号值的波动程度,将第二阈值设置为低于第一阈值的某一值,如果出现连续的、一定数量的信号低于第二阈值,则判定为出现负压波,低于第二阈值的信号为下降段信号;需要说明的是,第二阈值的大小根据实际情况进行设置,一般地,第二阈值相比第一阈值越小,则待测段的时间段越长,需要执行更多的计算来确定拐点时间,但是可以更准确的确定拐点出现时间;因此,第二阈值的大小需要在保证拐点出现时间准确率的前提下进行设定;在一实施例中,第一阈值的大小设定为130.92,相应的,第二阈值的大小设置为120;在平稳段中选择第5000个点作为起始点a,在下降段中选择第二阈值之后的第3000个点作为结束点b。
68.在一个优选的实施例中,所述步骤s600包括:
69.步骤s610、确定第一信号点的坐标值,作为第一坐标值;其中,所述第一信号点为所述第一曲线中的信号点;
70.步骤s620、利用坐标转化公式对第一坐标值进行运算,得到第二坐标值;其中,所述第二坐标值为第二信号点的坐标,所述第二信号点为第二曲线中与所述第一信号点对应的信号点。
71.在一个优选的实施例中,所述坐标转化公式为:
72.t
′
i
=t
i
cosa y
i
sina,y
′
i
=y
i
cosa
‑
t
i
sina;
73.其中,(t
i
,y
i
)为第一坐标值,(t'
i
,y'
i
),a为旋转角度。
74.在一个实施例中,设所取的信号点坐标为(t
i
,y
i
),a点坐标为(t
a
,y
a
),b点坐标为(t
b
,y
b
);将包含a、b点间曲线的图像提取出来,然后将其坐标轴旋转45
°
,获得旋转后的图
像,如图3所示。
75.与图1的方法相对应,本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有基于坐标转换的负压波信号拐点定位程序,所述基于坐标转换的负压波信号拐点定位程序被处理器执行时实现如上述任意一实施例所述的基于坐标转换的负压波信号拐点定位方法的步骤。
76.与图1的方法相对应,本发明实施例还提供一种基于坐标转换的负压波信号拐点定位系统,所述系统包括:
77.至少一个处理器;
78.至少一个存储器,用于存储至少一个程序;
79.当所述至少一个程序被所述至少一个处理器执行,使得所述至少一个处理器实现上述任一实施例所述的基于坐标转换的负压波信号拐点定位方法。
80.上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
81.所述处理器可以是中央处理单元(central
‑
processing
‑
unit,cpu),还可以是其他通用处理器、数字信号处理器(digital
‑
signal
‑
processor,dsp)、专用集成电路(application
‑
specific
‑
integrated
‑
circuit,asic)、现场可编程门阵列(field
‑
programmable
‑
gate
‑
array,fpga)或者其他可编程逻辑器件、分立门或者晶体管逻辑器件、分立硬件组件等。通用处理器可以是微处理器或者该处理器也可以是任何常规的处理器等,所述处理器是所述基于坐标转换的负压波信号拐点定位系统的控制中心,利用各种接口和线路连接整个基于坐标转换的负压波信号拐点定位系统可运行装置的各个部分。
82.所述存储器可用于存储所述计算机程序和/或模块,所述处理器通过运行或执行存储在所述存储器内的计算机程序和/或模块,以及调用存储在存储器内的数据,实现所述基于坐标转换的负压波信号拐点定位系统的各种功能。所述存储器可主要包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需的应用程序(比如声音播放功能、图像播放功能等)等;存储数据区可存储根据手机的使用所创建的数据(比如音频数据、电话本等)等。此外,存储器可以包括高速随机存取存储器,还可以包括非易失性存储器,例如硬盘、内存、插接式硬盘,智能存储卡(smart
‑
media
‑
card,smc),安全数字(secure
‑
digital,sd)卡,闪存卡(flash
‑
card)、至少一个磁盘存储器件、闪存器件、或其他易失性固态存储器件。
83.尽管本技术的描述已经相当详尽且特别对几个所述实施例进行了描述,但其并非旨在局限于任何这些细节或实施例或任何特殊实施例,而是应当将其视作是通过参考所附权利要求,考虑到现有技术为这些权利要求提供广义的可能性解释,从而有效地涵盖本技术的预定范围。此外,上文以发明人可预见的实施例对本技术进行描述,其目的是为了提供有用的描述,而那些目前尚未预见的对本技术的非实质性改动仍可代表本技术的等效改动。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。