1.本发明涉及手术辅助定位技术领域,具体而言,涉及一种手术辅助定位方法及系统。
背景技术:
2.主从手术机器人是一种集诸多学科为一体的新型医疗器械,是当前医疗器械信息化、程控化、智能化的一个重要发展方向,在临床微创手术以及远程手术等方面有着广泛的应用前景。
3.主从手术机器人一般包括控制台部分(即主端)和机械臂系统(即从端)。机械臂系统包括持镜臂和多个器械臂,持镜臂用于安装内窥镜,器械臂用于安装手术器械。控制台部分包括用于控制器械臂和手术器械动作的主手以及脚踏等控制件。
4.在腹腔手术中,医生根据手术中要使用的器械臂的数量确定创口(打孔)数量,其通常包括两个用于手术器械插入的创口以及一个用于内窥镜插入的创口。一般来说,医生往往仅凭借个人经验以及手术习惯选择创口位置,在确定创口位置时花费的时间较长。并且,在一些情况下,在手术过程中会出现创口的位置不合适,导致操作手术空间有限甚至需要再次打孔的情况,延长了手术时间影响手术效率。
技术实现要素:
5.本发明旨在一定程度实现主从手术机器人的手术辅助定位,降低医生在确定创口的工作量。
6.为至少在一定程度上解决或改善上述问题,本发明第一方面提出一种手术辅助定位方法,应用于手术辅助定位系统,所述手术辅助定位系统包括用于检测生物电阻抗的检测装置,所述方法包括:
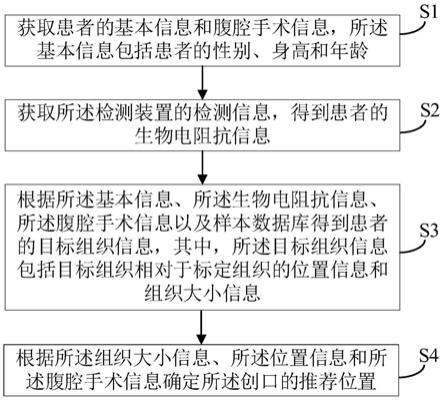
7.获取患者的基本信息和腹腔手术信息,所述基本信息包括患者的性别、身高和年龄;
8.获取所述检测装置的检测信息,得到患者的生物电阻抗信息;
9.根据所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,其中,所述目标组织信息包括目标组织相对于标定组织的位置信息和组织大小信息;
10.根据所述组织大小信息、所述位置信息和所述腹腔手术信息确定创口的推荐位置。
11.可选地,所述根据所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织的目标组织信息包括:
12.根据所述基本信息和所述腹腔手术信息在所述样本数据库中查找匹配的人体模型,以确定所述目标组织的位置信息和初始组织大小信息,所述样本数据库包括多个所述人体模型,各个所述人体模型根据人体的性别、身高和年龄确定;
13.根据所述生物电阻抗信息和所述样本数据库生成所述目标组织的组织大小调整信息,所述样本数据库还包括相对应的所述生物电阻抗信息和所述组织大小调整信息;
14.根据所述初始组织大小信息及所述组织大小调整信息生成所述目标组织的所述组织大小信息。
15.可选地,所述样本数据库的每个所述人体模型根据人体的性别、身高的区间段和年龄的年龄段确定。
16.可选地,所述手术辅助定位系统还包括主从手术机器人,所述确定所述创口的推荐位置之后,所述方法还包括:
17.标定所述主从手术机器人的机械臂系统和所述标定组织之间的空间位置关系;
18.根据所述空间位置关系和所述创口的推荐位置控制与所述机械臂系统连接的内窥镜和手术器械运动,以通过所述内窥镜和所述手术器械的位置指示对应的所述创口的推荐位置。
19.可选地,所述手术辅助定位系统还包括手术床,所述标定所述主从手术机器人的机械臂系统和所述标定组织之间的空间位置关系包括:
20.调整所述机械臂系统的十字激光和所述手术床的相对位置,使得所述十字激光位于所述手术床的预定区域内;
21.调整所述标定组织和所述十字激光的相对位置并使所述十字激光对准所述标定组织。
22.相对于相关的现有技术,本发明具有如下优势:
23.本发明所述手术辅助定位方法,通过获取患者的生物电阻抗信息,通过生物电阻抗信息能够大致判断患者的情况,例如目标组织有无肥大的现象,结合所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,从而能够得到创口的推荐位置,便于医生根据推荐位置快速找到创口位置并根据实际需要进行相应调整,降低医生的工作量,或者,便于初学习医生进行创口位置判断训练。并且,生物电阻抗的测量方式,基本无放射性,危害性较小,安全性高。
24.第二方面,本发明提出一种手术辅助定位系统,所述手术辅助定位系统包括检测装置和控制装置,所述检测装置用于采用生物电阻抗测量法测量患者的生物电阻抗,所述检测装置和所述控制装置通信连接;所述控制装置包括获取模块和定位模块,
25.所述获取模块用于获取患者的基本信息和腹腔手术信息,其中,所述基本信息包括患者的性别、身高和年龄,并用于获取所述检测装置的检测信息,得到生物电阻抗信息;
26.所述定位模块用于根据所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,其中,所述目标组织信息包括目标组织相对于标定组织的位置信息和组织大小信息;根据所述组织大小信息、所述位置信息和所述腹腔手术信息确定创口的推荐位置。
27.可选地,所述定位模块还用于标定主从手术机器人的机械臂系统和所述标定组织之间的空间位置关系;根据所述空间位置关系和所述创口的推荐位置控制与所述机械臂系统连接的内窥镜和手术器械运动,以通过所述内窥镜和所述手术器械的位置指示对应的所述创口的推荐位置。
28.可选地,所述手术辅助定位系统还包括手术床,所述检测装置与所述手术床连接,
所述检测装置包括至少四个检测头,其中四个所述检测头分别用于与人体的手腕和脚踝处贴合。
29.可选地,所述手术床包括床本体和至少一个连接件,每个所述连接件均设置有一个所述检测头,所述连接件与所述床本体可拆卸连接或者所述连接件隐藏式设置于所述床本体,至少一个所述连接件为设置于所述床本体两侧的扶手。
30.可选地,所述手术辅助定位系统还包括人机交互界面,所述人机交互界面至少用于显示信息和/或供医生输入信息。
31.如此,本发明所述手术辅助定位系统,通过获取患者的生物电阻抗信息,通过生物电阻抗信息能够大致判断患者的情况,例如目标组织有无肥大的现象,结合所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,从而能够得到创口的推荐位置,便于医生根据推荐位置快速找到创口位置并根据实际需要进行相应调整,降低医生的工作量,或者,便于初学习医生进行创口位置判断训练。并且,生物电阻抗的测量方式,基本无放射性,危害性较小,安全性高。
附图说明
32.图1为本发明的实施例中手术辅助定位方法的流程示意图;
33.图2为本发明的实施例中生成患者的目标组织信息步骤的具有流程示意图;
34.图3为本发明的实施例中手术辅助定位系统的控制装置的结构示意图;
35.图4为本发明的实施例中机械臂系统的结构示意图;
36.图5为图4中a处的局部放大视图;
37.图6为本发明的实施例中手术床的结构示意图;
38.图7为本发明的实施例中手术床的另一状态示意图。
39.附图标记说明:
[0040]1‑
机械臂系统,11
‑
内窥镜,12
‑
器械臂,13
‑
手术器械,14
‑
激光发生器,15
‑
持镜臂,2
‑
手术床,21
‑
床本体,22
‑
护板,22
‑
脚踏,23
‑
扶手,24
‑
脚踏。
具体实施方式
[0041]
为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
[0042]
如图1所示,本发明实施例提出一种手术辅助定位方法,应用于手术辅助定位系统,所述手术辅助定位系统包括用于检测生物电阻抗的检测装置,所述方法包括如下步骤s1至s4。
[0043]
步骤s1,获取患者的基本信息和腹腔手术信息,所述基本信息包括患者的性别、身高和年龄。
[0044]
基本信息可以通过数据库系统得到,例如,输入患者的姓名或者对应的编号,即可从数据库系统(例如可以是病案系统)中调取患者的基本信息。也可以通过医生输入得到该基本信息。腹腔手术信息一般包括手术类型和手术的目标组织。
[0045]
示例性地,手术辅助定位系统包括屏幕,屏幕用于显示和/或输入患者的基本信息。屏幕可以是控制台显示屏外(例如上方,也可以共用一个显示屏)设置一个屏幕。
[0046]
可选地,基本信息还可以包括体重、既往手术信息等信息。使得患者的各方面信息更加准确,便于后续与样本数据库进行匹配以及判断创口位置是否合适。
[0047]
步骤s2,获取所述检测装置的检测信息,得到患者的生物电阻抗信息。
[0048]
生物电阻抗测量法就是将轻微的电流导入人体,电流通过不同人体组织时,电阻值不同,按照体内脂肪不导电,体内水分导电的规律,脂肪部分和人体其他的组织阻力更高,通过收集电信号,结合大数据信息能够大致判断内脏的脂肪,器官是否增大以及器官位置等情况。
[0049]
检测装置可以采用相关的生物电阻抗检测设备,其不作为限制。例如,检测装置为设置于地面的检测板,当患者赤脚站立于检测装置时,能够检测到内脏脂肪的情况,还可以选择性的测得体重、脂肪重量等信息。
[0050]
步骤s3,根据所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,其中,所述目标组织信息包括目标组织相对于标定组织的位置信息和组织大小信息。
[0051]
需要说明的是,不同性别、身高、年龄的人群,其人体构造可能不同,特别是人体肥胖程度不同时,肾或者胆囊等器官(即腹腔手术信息应包括的目标组织,也就腹腔手术所针对的组织)的大小也有所差异,相关技术中可能需要通过多次ct拍片确定目标组织的大小和位置,其过程中的辐射将有可能造成人体的损伤,并且,其需要的分析时间较长。而当目标组织的大小和位置具有一定的差异时,创口的位置也具有一定的差异。
[0052]
而通过生物电阻抗信息能够无损伤地获知内脏脂肪情况,从而推测目标器官是否有增大以及增大比例等情况,从而得到较为准确的目标组织信息。
[0053]
样本数据库可以包括生物电阻抗信息对应的内脏脂肪是否增大以及增大的比例等信息,样本数据库可以根据相关的研究数据和/或历史数据得到。
[0054]
需要说明的是,标定组织一般为人体体表容易找到的特征组织,例如,肚脐、肩部关节、鼻梁等组织,本实施例中,标定组织为肚脐。
[0055]
步骤s4,根据所述组织大小信息、所述位置信息和所述腹腔手术信息确定创口的推荐位置。
[0056]
如此,本发明所述手术辅助定位方法,通过获取患者的生物电阻抗信息,通过生物电阻抗信息能够大致判断患者的情况,例如目标组织有无肥大的现象,结合所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,从而能够得到创口的推荐位置,便于医生根据推荐位置快速找到创口位置并根据实际需要进行相应调整,降低医生的工作量,或者,便于初学习医生进行创口位置判断训练。并且,生物电阻抗的测量方式,基本无放射性,危害性较小,安全性高。
[0057]
如图2所示,可选地,上述步骤s3具体包括:
[0058]
步骤s31,根据所述基本信息和所述腹腔手术信息在所述样本数据库中查找匹配的人体模型,以确定所述目标组织的位置信息和初始组织大小信息,所述样本数据库包括多个所述人体模型,各个所述人体模型根据人体的性别、身高和年龄确定。
[0059]
具体地,样本数据库包括多个人体模型,每个人体模型均与确定的性别、身高和年龄对应。也就是说,对于任意一个患者,根据其性别、身高和年龄均能够在样本数据库中找到匹配的人体模型。从而能够根据人体模型找到对应的目标组织的位置信息和初始组织大
小信息。
[0060]
步骤s32,根据所述生物电阻抗信息和所述样本数据库生成所述目标组织的组织大小调整信息,所述样本数据库还包括相对应的所述生物电阻抗信息和所述组织大小调整信息;
[0061]
需要说明的是,该初始组织大小可以理解为理论情况下目标组织的组织大小,组织大小调整信息可以用于表示该目标组织的实际大小与该初始组织大小的偏离程度,例如,根据生物电阻抗信息能够得到实际内脏脂肪数据,从而根据实际内脏脂肪数据相对于理论内脏脂肪数据判断内脏是否肥大或者萎缩,从而根据历史经验数据可以确定所述组织大小调整信息,例如,组织大小调整信息包括调整百分比。
[0062]
步骤s33,根据所述初始组织大小信息及所述组织大小调整信息生成所述目标组织的所述组织大小信息。
[0063]
示例性地,结合该初始组织大小信息和该调整百分比即可得到该目标组织的所述组织大小信息,此处不再详细说明。
[0064]
如此,本实施例中,首先根据患者的基本信息和样本数据库确定目标组织的位置信息和初始组织大小信息,然后根据所述生物电阻抗信息和所述样本数据库进一步判断是否需要对该初始组织大小信息进行调整,根据调整后得到的目标组织的所述组织大小信息、所述位置信息和所述腹腔手术信息(例如需要使用的手术器械13的数量)确定所述创口的推荐位置,由于其确定目标组织的所述组织大小信息更加准确,该创口的推荐位置也更加准确。
[0065]
可选地,在上述s31步骤中,所述样本数据库的每个所述人体模型根据人体的性别、身高的区间段和年龄的年龄段确定。
[0066]
示例性地,性别具有男性和女性具有2种不同的可能性,将年龄划分为n个连续的年龄段,对于某一个年龄段,均具有对应且确定的有限数个身高的区间段(符合自然规律),则能够得到样本数据库理论上所包括的人体模型的最小数量。
[0067]
当然,身高的区间段和年龄段应考虑实际情况,例如,青少年对应的的年龄段应相对于中年对应的年龄段划分更加详细,身高的区间段亦是如此。
[0068]
如此,能够大大降低样本数据库中包括的人体模型的信息重量,降低数据的收集和处理难度,却不会造成目标组织的位置信息和初始组织大小信息的较大误差,实用性强。
[0069]
具体地,在确定创口的推荐位置之后,进一步考虑如何将创口的推荐位置展现出来,在一些实施方式中通过显示屏显示该创口的推荐位置以及相关的数据。
[0070]
区别于仅通过显示屏显示的实施方式,在上述实施例中,所述手术辅助定位系统还包括主从手术机器人,所述步骤s4之后,所述方法还包括:
[0071]
s5,标定所述主从手术机器人的机械臂系统1和所述标定组织之间的空间位置关系。
[0072]
示例性地,手术辅助定位系统还包括摄像头,通过摄像头的图像信息标定机械臂系统1和所述标定组织之间的空间位置关系。从而能够便于后续操作。
[0073]
s6,根据所述空间位置关系和所述创口的推荐位置控制与所述机械臂系统1连接的内窥镜11和手术器械13运动,以通过所述内窥镜11和所述手术器械13的位置指示对应的所述创口的推荐位置。
[0074]
示例性地,通过控制持镜臂15的各关节动作使得内窥镜11的末端运动至对应的创口的推荐位置处,例如,运动至对应的创口的推荐位置的正上方,且间隔人体10
‑
20cm设置。当然也可以运动至对应的创口的推荐位置的斜上方,其可以根据约定规则进行指示。
[0075]
通过控制器械臂12的各关节动作使得手术器械13的末端的运动位置与此类似,此处不再详细说明。
[0076]
如此,一方面通过所述内窥镜11和所述手术器械13的位置指示对应的所述创口的推荐位置,指示明确,可靠性高,无需借助另外的设备向医生展示各创口的推荐位置;另一方面,所述内窥镜11和所述手术器械13运动对应的创口处,降低了医生的手动操作的工作量,能够提高效率,降低医生的负担。
[0077]
可选地,所述手术辅助定位系统还包括手术床2,步骤s5包括:
[0078]
调整所述机械臂系统1的十字激光和所述手术床2的相对位置,使得所述十字激光位于所述手术床2的预定区域内;
[0079]
调整所述标定组织和所述十字激光的相对位置并使所述十字激光对准所述标定组织。
[0080]
应当理解的是,十字激光由设置于机械臂系统1的激光发生器14发射,通过调整激光发生器14的位置实现十字激光的位置调整,当激光发生器14的位置移动时,机械臂系统1的各臂整体跟随激光发生器14移动。
[0081]
手术床2的预定区域的设定需要考虑患者躺在病床时患者左右两侧需具有一定的空间,一般来说,该预定区域为手术床2的中心区域,一般可以理解为手术床2的中心。
[0082]
示例性地,标定组织为患者的肚脐,使得十字激光与肚脐对准即可实现机械臂系统1和所述标定组织之间的空间位置关系标定。
[0083]
需要说明的是,一般来说,腹腔手术一般包括三个创口,第一个创口用于内窥镜11的通过,第二个创口和第三个创口分别用于一个手术器械13的通过,三个创口共线,且间隔目标组织10
‑
20cm,例如16
‑
20cm。相邻两个创口之间距离6
‑
9cm,例如8cm。
[0084]
本发明的又一实施例提出一种手术辅助定位系统,所述手术辅助定位系统包括检测装置和如图3所示的控制装置,所述检测装置用于采用生物电阻抗测量法测量患者的生物电阻抗,所述检测装置和所述控制装置通信连接;所述控制装置包括获取模块和定位模块,
[0085]
所述获取模块用于获取患者的基本信息和腹腔手术信息,其中,所述基本信息包括患者的性别、身高和年龄,并用于获取所述检测装置的检测信息,得到生物电阻抗信息;
[0086]
所述定位模块用于根据所述基本信息、所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,其中,所述目标组织信息包括目标组织相对于标定组织的位置信息和组织大小信息;根据所述组织大小信息、所述位置信息和所述腹腔手术信息确定创口的推荐位置。
[0087]
需要说明的是,该手术辅助定位系统用于实现如上各实施例中描述的手术辅助定位方法,有关手术辅助定位系统的部分内容在前文已经描述,并且,本领域技术人员根据方法部分的内容得到辅助定位系统的更多细节,相反亦是如此。
[0088]
如此,本发明所述手术辅助定位系统,通过获取患者的生物电阻抗信息,通过生物电阻抗信息能够大致判断患者的情况,例如目标组织有无肥大的现象,结合所述基本信息、
所述生物电阻抗信息、所述腹腔手术信息以及样本数据库得到患者的目标组织信息,从而能够得到创口的推荐位置,便于医生根据推荐位置快速找到创口位置并根据实际需要进行相应调整,降低医生的工作量,或者,便于初学习医生进行创口位置判断训练。并且,生物电阻抗的测量方式,基本无放射性,危害性较小,安全性高。
[0089]
如图4和图5所示,进一步地,所述定位模块还用于标定主从手术机器人的机械臂系统1和所述标定组织之间的空间位置关系;根据所述空间位置关系和所述创口的推荐位置控制与所述机械臂系统1连接的内窥镜11和手术器械13运动,以通过所述内窥镜11和所述手术器械13的位置指示对应的所述创口的推荐位置。
[0090]
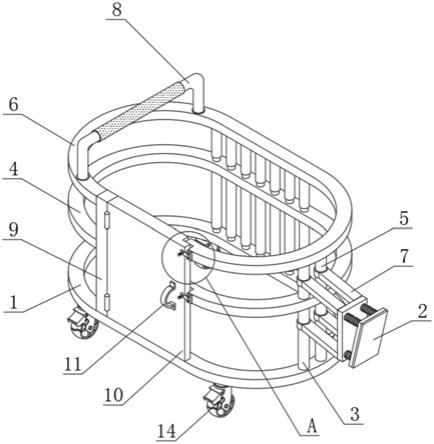
如图6所示,进一步,所述手术辅助定位系统还包括手术床2,所述检测装置与所述手术床2连接,所述检测装置包括至少四个检测头,其中四个所述检测头分别用于与人体的手腕和脚踝处贴合。
[0091]
如此,当患者躺卧于手术床2时,将四个检测头分别贴合至人体的两个手腕和两个脚踝处,从而实现对患者的生物电阻抗检测。
[0092]
进一步地,所述手术床2包括床本体21和至少一个连接件,每个所述连接件均设置有一个所述检测头,所述连接件与所述床本体21可拆卸连接或者所述连接件隐藏式设置于所述床本体21,至少一个所述连接件为设置于所述床本体21两侧的扶手23。
[0093]
示例性地,扶手23上安装有该检测头,例如检测头通过卡扣连接结构连接于扶手23的上表面,当患者手扶于该检测头时,可以用于检测该生物电阻抗,简化检测难度。
[0094]
进一步的,手术床2的一端还设置有护板22,所述护板22上移动设置有脚踏24,至少一个连接件为该脚踏24。脚踏24可以沿手术床2的长度方向移动。例如,脚踏24和护板22之间设置有弹簧或者其他驱动件。
[0095]
如此,当患者躺于手术床2时,双手放置于左右两个扶手23上的检测头处,两脚分别与设置于脚踏24上的两个检测头检测,从而实现生物电阻抗的检测,应当理解,手术床2与人体接触的部位应采用绝缘材料制作。
[0096]
如图7所示,进一步,该手术床2为折叠式轮椅床,其包括第一使用状态和第二使用状态,在第一使用状态下,其作为手术床2使用,在第二使用状态下,其作为轮椅使用,当其作为轮椅使用时,患者坐立于其上,双手扶住扶手23,脚踩踏于该脚踏24,即可实现生物电阻抗的检测。
[0097]
该手术床2还可以与所述定位模块无线通信。如此,可以在进入手术室之前或者快速完成生物电阻抗的检测,降低手术室的占用时间,结构简单,实用性强。
[0098]
在上述实施例中,手术辅助定位系统还包括人机交互界面,所述人机交互界面至少用于显示信息和/或供医生输入信息。
[0099]
示例性地,人机交互界面设置于手术床2,和/或,人机交互界面设置于主从手术机器人的控制台的显示器的一侧。
[0100]
示例性地,人机交互界面用于医生输入患者的基本信息。
[0101]
示例性地,所述人机交互界面用于在确定创口的推荐位置后,显示创口的推荐位置图像,和/或,用于医生调整所述创口的位置。
[0102]
在本说明书的描述中,需要说明的是,除非另有明确的规定和限定,术语“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接。术语“第一”、“第二”等仅用于描
述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。
[0103]
在本说明书的描述中,参考术语“实施例”、“一个实施例”、“一些实施方式”、“示例性地”等的描述意指结合该实施例或实施方式描述的具体特征、结构等特点包含于至少一个实施例或实施方式中。上述示意性表述不一定指的是相同的实施例或实施方式。描述的具体特征、结构或者特点可以在任何的一个或多个实施例或实施方式以合适的方式结合。
[0104]
虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员,在不脱离本公开的精神和范围的前提下,可进行各种变动与修改,这些变动与修改均将落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。