1.本技术涉及机器人领域,具体涉及一种智能机器人的驱动装置以及智能机器人。
背景技术:
2.目前的智能机器人具有自移动功能,例如扫地机器人、洗地机器人或擦地机器人等,大都能够自动导航来执行对针对周围环境的清洁任务。通常智能机器人主体安装有驱动装置,以通过驱动装置执行移动或清洁地面等任务,但通常驱动装置采用有刷电机,其电机结构比较复杂且体积过大,导致智能机器人的驱动装置的整体结构体积过大,尤其是电机占用宽度尺寸过大,严重影响智能机器人内部其他器件的排布。
技术实现要素:
3.本技术实施例提供一种智能机器人的驱动装置以及智能机器人,以解决智能机器人的驱动装置的整体结构体积过大的技术问题。
4.本技术实施例提供一种智能机器人的驱动装置,所述智能机器人的驱动装置包括壳体、传动组件、转动件和无刷电机,所述壳体包括相对设置的第一壳体和第二壳体,所述第一壳体固定连接所述第二壳体,所述第一壳体和所述第二壳体围设形成有收容腔,所述第二壳体背离所述第一壳体一侧设有安装部;所述传动组件安装于所述收容腔内并与所述壳体连接;所述转动件转动连接所述第一壳体或所述第二壳体,并与所述传动组件传动连接;所述无刷电机安装于所述安装部,并与所述传动组件传动连接,以通过所述传动组件驱动所述转动件。
5.本技术实施例还提供一种智能机器人,所述智能机器人包括如上所述的智能机器人的驱动装置,以及机器人主体,所述智能机器人的驱动装置安装于所述机器人主体上,所述转动件为行走轮或清洁刷或清洁辊。
6.区别于现有技术,上述智能机器人的驱动装置以及智能机器人,通过所述第一壳体和所述第二壳体围设形成有收容腔,所述第二壳体背离所述第一壳体一侧设有安装部;又通过所述无刷电机安装于所述安装部,并与所述传动组件传动连接,以通过所述传动组件驱动所述转动件,从而利用所述第二壳体可以对所述无刷电机起到承载作用和保护作用,所述无刷电机的体积小,所占用安装空间小,使得上述驱动装置的结构紧凑,体积小,进而节省上述驱动装置在智能机器人所占用的排布空间。
附图说明
7.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
8.图1是本技术实施例一提供的一种智能机器人的截面结构示意图;
9.图2是图1所提供的智能机器人的分解结构示意图一;
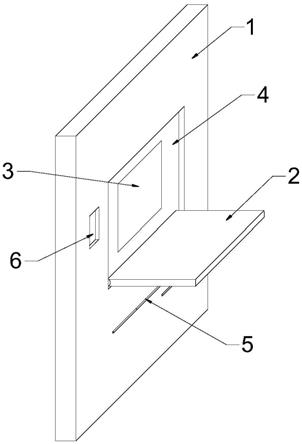
10.图3是图2中a处放大示意图;
11.图4是图1所提供的智能机器人的分解结构示意图二;
12.图5是本技术实施例一提供的智能机器人的驱动装置的分解结构示意图;
13.图6是本技术实施例一提供的智能机器人的驱动装置的截面结构示意图一;
14.图7是本技术实施例一提供的智能机器人的驱动装置的截面结构示意图二;
15.图8是本技术实施例一提供的智能机器人的驱动装置的截面结构示意图三;
16.图9是图8中的局部截面结构示意图;
17.图10是本技术实施例一提供的智能机器人的驱动装置的截面结构示意图四;
18.图11是本技术实施例二提供的一种智能机器人的截面结构示意图。
具体实施方式
19.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.需要说明的是,如果不冲突,本技术实施例中的各个特征可以相互结合,均在本实用新型的保护范围之内。另外,虽然在装置示意图中进行了功能模块划分,在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于装置中的模块划分,或流程图中的顺序执行所示出或描述的步骤。再者,本实用新型所采用的“第一”、“第二”、“第三”等字样并不对数据和执行次序进行限定,仅是对功能和作用基本相同的相同项或相似项进行区分。
21.实施例一
22.请参阅图1至图5,本技术实施例提供一种智能机器人200。所述智能机器人200包括机器人主体300和驱动装置100。所述智能机器人的驱动装置100安装于所述机器人主体300上。
23.可以理解的是,所述智能机器人200可以是清洁机器人,例如,所述智能机器人200可以是扫地机器人、扫拖一体式机器人、擦地机器人或洗地机器人等其中任意一种;所述智能机器人200也可以是送餐机器人、物流机器人、家用管家机器人或agv机器人等。当然,所述智能机器人200的具体类型可以不局限于上述举例。
24.本实施方式以所述智能机器人200为扫地机器人为例进行描述。所述智能机器人200可以被设计成自主地在地面上规划路径,也可以被设计成响应于遥控指令在地面上移动。所述智能机器人200可以通过陀螺仪、加速度计、摄像头、gps定位和/或激光雷达等其中一种或几种的组合进行导航,例如,所述智能机器人200可以在顶面凸出设置激光雷达,通过激光雷达对周围环境进行扫描采集障碍物数据,根据障碍物数据建立环境地图,可以根据环境地图进行实时定位,便于规划清洁路径。
25.所述机器人主体300为所述智能机器人200的主体部分,所述机器人主体300可以呈圆形、矩形或d形等任意一种形状,在此不作限定。在一可选实施例中,机器人主体300也可以是其他设计构造,例如,机器人主体300为一体成型结构、左右分离设置的结构,本实用新型实施例对本体的材料、形状、结构等不做限定。
26.所述智能机器人的驱动装置100包括壳体10、传动组件40、转动件20和无刷电机
30。所述壳体10包括相对设置的第一壳体11和第二壳体12,所述第一壳体11固定连接所述第二壳体12,所述第一壳体11和所述第二壳体12围设形成有收容腔13。所述第二壳体12背离所述第一壳体11一侧设有安装部;所述传动组件40安装于所述收容腔13内并与所述壳体10连接;所述转动件20转动连接所述第一壳体11或所述第二壳体12,并与所述传动组件40传动连接;所述无刷电机30安装于所述安装部,并与所述传动组件40传动连接,以通过所述传动组件40驱动所述转动件20。其中,所述第一壳体11可以通过螺钉连接、卡扣连接、插销连接或胶水粘结等方式固定连接所述第二壳体12。
27.区别于现有技术,上述智能机器人的驱动装置100以及智能机器人200,通过所述第一壳体11和所述第二壳体12围设形成有收容腔13,所述第二壳体12背离所述第一壳体11一侧设有安装部;又通过所述无刷电机30安装于所述安装部,并与所述传动组件40传动连接,以通过所述传动组件40驱动所述转动件20,从而利用所述第二壳体12可以对所述无刷电机30起到承载作用和保护作用,使得所述无刷电机30无需单独设置保护壳体,且所述无刷电机30的体积小,所占用安装空间小,使得上述驱动装置100的结构紧凑,体积小,进而节省上述驱动装置100在智能机器人200所占用的排布空间。
28.在本实施方式中,所述安装部包括形成于所述第二壳体12背离所述第一壳体11一侧的安装槽126,所述无刷电机30安装于所述安装槽126内。在其他实施方式中,所述安装部的结构形式可以有多种,并不局限于上述举例,例如,所述安装部可以包括形成于所述第二壳体12背离所述第一壳体11一侧的安装座,在此不一一列举。
29.在本实施方式中,所述转动件20为行走轮。所述转动件20和所述无刷电机30均安装于所述第二壳体12背离所述第一壳体11一侧。所述转动件20通过转轴转动连接所述第二壳体12。所述机器人主体300在底部设置有车轮槽50,所述壳体10转动连接于所述机器人主体300,并至少部分收容于所述车轮槽50内,所述转动件20转动连接于所述壳体10,并伸出所述车轮槽50设置。在其他实施方式中,所述转动件20也可以为清洁刷或清洁辊。在其他实施方式中,所述转动件20也可以转动连接所述第一壳体11。
30.所述机器人主体300可以包括底盘51和上盖组件52,上盖组件52可拆卸地安装于底盘51上,以在使用期间保护智能机器人200内部的各种功能部件免受激烈撞击或无意间滴洒的液体的损坏;底盘51和/或上盖组件52用于承载和支撑各种功能部件。所述上盖组件52背离所述底盘51的表面形成外观面,可以提升所述智能机器人200的整体外观,外观面上可以设置按键,方便用户通过按键操作所述智能机器人200。所述底盘51和所述上盖组件52之间形成所述安装腔,所述安装腔用于为所述智能机器人200的内部器件提供排布空间。所述智能机器人200可以在所述安装腔中排布真空泵、电路板、地面检测传感器、碰撞检测传感器和沿墙传感器等。
31.所述底盘51形成所述机器人主体300的底部,所述车轮槽50贯穿所述底盘51设置。所述机器人主体300还包括连接所述底盘51的车轮罩54,所述车轮罩54罩设于所述驱动装置100的上方,所述车轮罩54可以对所述驱动装置100起到保护作用。在其他实施方式中,所述机器人主体300也可以不设置所述车轮罩54。
32.其中,所述车轮罩54的数量与所述车轮槽50的数量相同,所述驱动装置100的数量与所述车轮槽50的数量相同。在本实施方式中,所述车轮罩54、所述车轮槽50和所述驱动装置100的数量均为两个。在其他方式中,所述车轮罩54、所述车轮槽50和所述驱动装置100的
数量可以是一个或者两个以上。
33.所述车轮罩54的内腔至少形成所述车轮槽50的一部分。其中,所述底盘51设置有供所述驱动装置100穿过的镂空区域55,所述车轮罩54正对所述镂空区域55设置,所述车轮罩54靠近所述镂空区域55一端形成敞口端,以使得所述车轮罩54的内腔通过所述敞口端与所述镂空区域55相连通,则所述车轮罩54的内腔和所述底盘51的镂空区域55组成所述车轮槽50。在其他实施方式中,所述车轮罩54的内腔完全形成所述车轮槽50。
34.其中,所述车轮罩54可以通过螺钉等方式固定连接所述底盘51,或者,所述车轮罩54与所述底盘51一体注塑成型。
35.所述驱动装置100的壳体10可以通过转轴转动连接于所述底盘51或所述车轮罩54。所述驱动装置100的壳体10设置有轴孔,所述轴孔处可安装转轴,可以将所述转轴安装在所述底盘51或者所述车轮罩54上,安装的方式可以有多种,例如,所述底盘51上安装有转轴支架,所述转轴支架设置有对准所述轴孔的通孔,所述转轴的端部可嵌入到所述通孔内,实现所述壳体10通过转轴与所述底盘51和所述转轴支架组装;或者,所述车轮罩54设置有对准所述轴孔的通孔,所述转轴的端部可嵌入到所述通孔内,实现所述壳体10通过转轴与所述车轮罩54组装。
36.所述壳体10的转动轴线x、所述无刷电机30的转动轴线y和所述转动件20的转动轴线相互平行,所述壳体10的转动轴线x与所述无刷电机30的转动轴线y的距离为第一距离,所述壳体10的转动轴线x与所述转动件20的转动轴线的距离为第二距离,其中,所述第一距离小于所述第二距离,则所述无刷电机30的转动轴线y相对靠近所述壳体10的转动轴线x,所述无刷电机30隐藏于所述车轮槽50内,所述无刷电机30占用的活动空间相对较小,有利于实现所述车轮槽50的体积最小化。其中,所述无刷电机30和所述转动件20均呈圆形,所述无刷电机30的直径小于所述转动件20的直径,所述无刷电机30的转动轴线y与所述无刷电机30的圆心重合,所述转动件20的转动轴线与所述转动件20的圆心重合;所述壳体10的转动轴线x即所述壳体10相对所述机器人主体300转动的转轴中心线,所述无刷电机30的转动轴线y即所述无刷电机30的转动罩转动的转轴中心线,所述转动件20的转动轴线即所述转动件20相对所述壳体10转动的转轴中心线。
37.所述转动件20穿过所述底盘51的镂空区域55设置,以伸出所述车轮槽50,所述转动件20伸出所述车轮槽50的部分可抵触于地面,从而可以对所述机器人主体300起到支撑作用,机器人主体300通过所述转动件20在地面上行走。
38.所述传动组件40可以包括多个齿轮,所述多个齿轮包括输入齿轮56和输出齿轮57,以及至少一个传动齿轮58。所述输入齿轮56固定连接于所述无刷电机30的转动罩的转动中心处,所述输出齿轮57固定连接于所述转动件20的转动中心处,所述至少一个传动齿轮58转动连接所述壳体10,并传动连接所述输入齿轮56和所述输出齿轮57,以使得所述输入齿轮56通过所述至少一个传动齿轮58与所述输出齿轮57相联动。所述输入齿轮56用于接收所述无刷电机30的转动力矩的输入,所述输入齿轮56在所述无刷电机30的驱动下可通过所述至少一个传动齿轮58带动所述输出齿轮57转动,进而通过所述输出齿轮57带动所述转动件20转动。其中,所述传动齿轮58的数量可以是一个或两个或两个以上。在其他实施方式中,所述传动组件40也可以不局限于上述举例,所述传动组件40也可以包括多个带轮与传动带的组合。
39.请继续参阅图1、图3、图8和图9,所述无刷电机30设有电连接部35,所述电连接部35凸设于所述无刷电机30远离所述转动件20一侧,并靠近所述车轮槽50底部设置。所述电连接部35用于接入导电部,以通过导电部电连接所述智能机器人200的主电路板59。
40.所述无刷电机30的主体大致呈圆形,所述无刷电机30具有周侧面,所述周侧面围绕所述无刷电机30的中心轴线设置,所述电连接部35的延伸方向与所述无刷电机30的周侧面相交设置,从而所述电连接部35不必占用所述无刷电机30轴向方向的尺寸,有利于减少无刷电机30占用所述第二壳体12的宽度尺寸,进而使得驱动装置100的整体结构紧凑体积小。
41.其中,所述无刷电机30包括转动罩33,所述转动罩设有所述周侧面,所述转动罩33可转动地连接于所述第二壳体12,并传动连接所述传动组件40,以通过所述传动组件40驱动所述转动件20;所述电连接部35与所述转动罩33相邻设置,所述电连接部35和所述转动罩33沿垂直于所述无刷电机30的转动轴线y方向排列,所述电连接部35与所述转动罩33之间设置有活动间隙,从而所述电连接部35与所述转动罩33互不干涉。在其他实施方式中,所述电连接部35凸设于所述无刷电机30背离所述第二壳体12一侧。
42.所述电连接部35用于接入导电部,以使得所述无刷电机30通过导电部电连接所述智能机器人200的主电路板59。其中,上述导电部可以是导线或者柔性电路板或者其他类型的导体。所述智能机器人200的主电路板59固定于所述底盘51上。所述主电路板59可以通过上述导电部和电连接部35对所述无刷电机30发出控制信号,以通过所述控制信号控制所述无刷电机30启动、停止、加速转动或减速转动等其中任意一种。
43.请参阅图3、图5和图6,进一步地,所述转动件20为行走轮,所述转动件20具有背离所述第二壳体12的第一端面21,所述无刷电机30具有背离所述第二壳体12的第二端面31,所述第二端面31和所述第一端面21之间形成段差,且所述第二端面31相对所述第一端面21靠近所述第二壳体12,或者,所述第二端面31与所述第一端面21相平齐。
44.在本实施方式中,所述转动件20和所述无刷电机30在平行所述第二壳体12与所述第一壳体11相对方向上至少部分重叠设置。所述第一端面21与所述第二端面31大致相互平行,其中,所述第一端面21大致垂直于所述无刷电机30的转动轴线y方向,所述第二端面31大致垂直于所述转动件20的转动轴线方向。通过所述第二端面31和所述第一端面21之间形成段差,且所述第二端面31相对所述第一端面21靠近所述第二壳体12,避免了所述无刷电机30相对所述转动件20突出而增加所述驱动装置100的宽度尺寸。在其他实施方式中,所述第二端面31与所述第一端面21相平齐。
45.请参阅图5和图6,进一步地,所述安装槽126远离所述收容腔13一侧形成有让位开口130,所述壳体10还包括端盖70,所述端盖70固定连接所述第二壳体12并封盖所述让位开口130设置。
46.本实施方式中,所述第二壳体12背离所述第一壳体11一侧形成凸筋结构131,所述凸筋结构131大致沿环形延伸,所述凸筋结构131围合形成所述安装槽126,其中,上述环形可以是圆环、方环或异形环等任意一种,在此不作限定。所述凸筋结构131呈一端敞口的筒状,即所述凸筋结构131具有背对所述第一壳体11的开口端,所述让位开口130形成于所述开口端处。所述无刷电机30可以通过所述让位开口130安装于所述安装槽126内。所述端盖70可以通过螺钉、卡扣、销钉或胶水粘结等方式固定连接所述第二壳体12。所述端盖70的形
状尺寸与所述让位开口130的形状尺寸相匹配,便于所述端盖70封盖所述让位开口130设置。所述端盖70可以起到防尘的作用,防止外部灰尘或毛发经所述让位开口130落入所述安装槽126内,避免灰尘或毛发积聚在所述安装槽126内而阻碍所述无刷电机30正常运转。
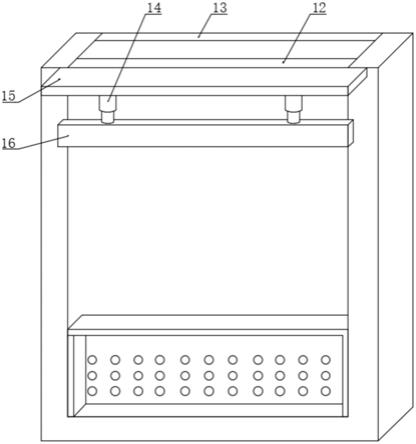
47.请参阅图5和图6,进一步地,所述无刷电机30与所述安装槽126的内周侧壁之间设置有活动间隙,所述端盖70设有多个通孔72,所述多个通孔72设置于所述端盖70正对所述无刷电机30的部分,并与所述活动间隙错开设置。
48.在本实施方式中,所述安装槽126大致呈圆形槽,所述无刷电机30的主体也大致呈圆形,且所述无刷电机30的主体的直径小于所述安装槽126的直径,使得所述无刷电机30的主体可以完全收容于所述安装槽126内,且所述无刷电机30与所述安装槽126的内周侧壁之间形成环形的活动间隙。所述活动间隙可以为所述无刷电机30运转提供活动空间,避免所述无刷电机30运转时刮擦所述安装槽126的内周侧壁。所述端盖70上的多个通孔72可以起到散热作用,使得所述无刷电机30在运转时在所述安装槽126内形成气流,通过气流可以将无刷电机30产生的热量可以通过所述多个通孔72散发到外界,避免所述无刷电机30过热。并且,通过所述多个通孔72设置于所述端盖70正对所述无刷电机30的部分,并与所述活动间隙错开设置,所述无刷电机30在运转时产生的气流可以通过所述多个通孔72流出,可以阻碍外部灰尘或者毛发进入所述安装槽126内。
49.在一种实施方式中,所述多个通孔72呈阵列分布在所述端盖70的预设区域内,预设区域与无刷电机30正对设置,从而可以充分散热所述无刷电机30的散热,并利用无刷电机30转动时带动气流从所述多个通孔72充分逸出,以吹散灰尘或毛发。其中,预设区域可以为圆形区域,也可以更为其他形状,本领域的技术人员可以根据实际需要自行设置。
50.请参阅图6和图7,在其他实施方式中,所述无刷电机30的外周侧壁与所述安装槽126的内周侧壁之间设置有环形间隙,所述智能机器人的驱动装置100还包括环形轴承80,所述环形轴承80配合于所述环形间隙内,以使所述转动罩33通过所述环形轴承80转动连接所述第二壳体12。其中,所述环形轴承80可以起到辅助所述转动罩33转动的作用,同时,由于所述环形轴承80配合于所述环形间隙内,所述环形轴承80可以起到防尘的作用,避免灰尘或毛发积聚在所述安装槽126内而阻碍所述无刷电机30正常运转,则所述壳体10可以不包括所述端盖70,即所述安装槽126的让位开口130对外敞开,从而可以节省端盖70,有利于减少产品成本。
51.其中,环形轴承80的轴承形式有很多种,环形轴承80可以是深沟球轴承、调心球轴承、滚针轴承、调心滚子轴承、圆柱滚子轴承或推力球轴承等其中任意一种,在此不一一列举。
52.请参阅图5、图6、图8和图9,进一步地,所述第二壳体12设有贯穿所述安装槽126内侧壁设置的贯口128,所述贯口128与所述让位开口130相连设置,所述无刷电机30设有穿过所述贯口128设置的电连接部35,所述电连接部35用于接入导电部,所述端盖70设有朝所述贯口128延伸的定位部71,所述定位部71与所述贯口128定位配合并抵触于所述电连接部35。
53.本实施方式中,所述让位开口130具有开口边缘,所述贯口128贯穿所述开口边缘设置,使得所述贯口128与所述让位开口130相连设置。所述端盖70的主体呈片状,所述端盖70的主体封盖所述让位开口130设置。所述定位部71凸设于所述端盖70的主体的边缘设置。
所述定位部71与所述贯口128定位配合,使得所述端盖70与所述第二壳体12的配合精度高。所述定位部71可以封盖部分所述贯口128,所述电连接部35占据所述贯口128余下的部分。通过所述定位部71与所述贯口128定位配合并抵触于所述电连接部35,所述定位部71还可以对所述电连接部35起到稳固加强作用,避免所述电连接部35受到外部冲击而变形或者相对所述第二壳体12晃动。
54.请参阅图10,在其他实施方式中,所述第二壳体12设有贯穿所述安装槽126内侧壁设置的贯口128,所述无刷电机30设有电连接部35,所述电连接部35收容于所述安装槽126内并对准所述贯口128设置,所述智能机器人的驱动装置100还包括密封件81,所述密封件81密封配合于所述贯口128处。其中,所述贯口128可以贯穿所述开口边缘设置,或者,所述贯口128与所述开口边缘间隔设置。所述密封件81与所述贯口128相适配,所述密封件81的材质可以是硅胶、橡胶、密封胶水或者塑胶等。所述电连接部35收容于所述安装槽126内,即所述电连接部35不必暴露在外部,有利于提高防水防尘性能。所述密封件81可以对所述贯口128起到密封作用,防止外部水汽或灰尘通过所述贯口128进入所述安装槽126,进而提高防水防尘性能,对所述无刷电机30起到保护作用。外部导线可以穿过所述密封件81连接至所述电连接部35。
55.请参阅图5、图6、图8和图9,进一步地,所述无刷电机30包括电控板36、定子32和转动罩33,所述电控板36固定于所述安装槽126底部,所述定子32固定连接并电连接所述电控板36,所述定子32位于所述电控板36背离所述安装槽126底部一侧,所述转动罩33转动连接所述壳体10,并罩设于所述定子32上。
56.所述第二壳体12对应所述无刷电机30的位置形成有凸轴部121,所述凸轴部121设置有轴孔,所述凸轴穿过所述电控板36和所述定子32设置,所述转动罩33设有与所述轴孔转动配合的转轴331,部分所述转轴331穿过所述轴孔伸入所述收容腔13,以与所述传动组件40传动连接。
57.本实施方式中,所述电控板36可以通过焊接、螺钉连接或胶水粘结等方式固定于所述安装槽126的底部,所述电控板36设有供所述凸轴部121穿过的通孔72。所述定子32固定于所述电控板36背离所述安装槽126底部一侧,所述定子32可以通过焊接、螺钉连接或胶水粘结等方式固定于所述电控板36。
58.所述定子32大致呈环形,所述定子32围绕所述凸轴部121设置。所述定子32包括环形支架和多个线圈绕组,所述环形支架围绕所述凸轴部121设置,所述多个线圈绕组分别间隔固定于所述环形支架的周侧。所述多个线圈绕组分别电连接所述电控板36。
59.所述转动罩33罩设于所述定子32上。所述转动罩33与所述电控板36相对设置,所述转动罩33与所述电控板36之间预留有活动间隙,以便于所述转动罩33相对所述电控板36转动。所述转动罩33靠近所述电控板36一侧形成有腔体,所述腔体至少部分收容所述定子32。所述转动罩33在所述腔体内壁设置有环形磁体334,所述环形磁体334围绕所述凸轴部121设置,所述环形磁体334与所述定子32的多个线圈绕组相对设置。所述定子32的多个线圈绕组可接收电信号而产生电磁场,以通过磁场的相互作用驱动所述转动罩33相对所述定子32转动,进而经所述传动组件40带动所述转动件20转动。
60.所述凸轴部121穿过所述电控板36并伸入所述转动罩33的腔体内,所述凸轴部121可以为所述转动罩33提供定位作用和支撑作用,所述无刷电机30与所述第二壳体12的装配
结构足够紧凑,结构稳定性高,使得所述无刷电机30上不必设置定位支架和轴承,并且所述转动罩33可以足够靠近所述安装槽126的底部,从而进一步减少所述无刷电机30在所述壳体10上占用的宽度尺寸,使得所述驱动装置100的体积足够小。
61.请参阅图5、图6、图8和图9,进一步地,所述凸轴部121包括塑胶部122和金属部123,所述塑胶部122与所述第二壳体12一体设置,所述塑胶部122设置有连通所述收容腔13的通孔72,所述金属部123嵌设于所述通孔72内,所述金属部123设有所述轴孔。
62.在本实施方式中,所述塑胶部122大致呈柱状。所述塑胶部122与所述第二壳体12一体注塑成型。所述通孔的延伸方向大致平行所述塑胶部122的延伸方向。所述金属部123呈柱状,所述金属部123沿所述通孔延伸。所述轴孔沿所述金属部123的轴向延伸。所述转动罩33的转轴与所述金属部123的轴孔间隙配合,所述金属部123的耐磨性能相对较为优良,且摩擦系数小,有利于减少所述转动罩33的转轴相对所述凸轴部121转动的摩擦力,同时减少对所述凸轴部121的磨损。所述塑胶部122包覆所述金属部123设置,所述塑胶部122的绝缘性能优良,可以将所述电控板36和所述金属部123隔离开,避免所述电控板36与所述金属部123产生静电作用。
63.请参阅图5、图6、图8和图9,进一步地,所述无刷电机30包括端口37,所述电控板36在边缘设有凸出部361,所述端口37固定连接并电连接所述凸出部361,所述端口37和所述凸出部361组成所述电连接部35。
64.本实施方式中,所述电控板36除所述凸出部361之外的部分为所述电控板36的主体部,所述电控板36的主体部收容于所述安装槽126内,所述电控板36固定于所述安装槽126的底部。所述凸出部361可以对所述端口37起到支撑作用,并为所述端口37供电。所述端口37焊接固定在所述凸出部361上,所述端口37用于接入导电部,从而所述电控板36和所述主电路板59可以通过导电部和所述端口37实现电信号交互,以实现对所述行走轮模块的控制。
65.所述端口37设有多个引脚,所述端口37的多个引脚焊接于所述电控板36的凸出部361上,以实现多个引脚电连接所述电控板36的凸出部361,便于输入输出多路电信号。
66.实施例二
67.请参阅图,本实施例二提供另一种智能机器人的驱动装置100,本实施例二所提供的智能机器人的驱动装置100与实施例一所提供的智能机器人的驱动装置100的主要区别在于:所述转动件20可以为清洁刷或者清洁辊。
68.一种实施方式中,所述转动件20为清洁刷。所述转动件20可以为毛刷、胶刷或毛胶混合刷等其中任意一种,所述转动件20可以用于清扫垃圾。其中,所述机器人主体300在底部设置有清洁仓500和行走轮400,所述转动件20可转动地安装于所述清洁仓500处,即所述转动件20为中扫滚刷。所述清洁仓500设置有与尘盒600和吸尘风机连通的吸尘口,所述转动件20可以在所述无刷电机30的驱动下相对所述机器人主体300转动,进而扬起地面上的灰尘,进而吸尘风机通过吸尘口将扬起的灰尘吸入上述尘盒600内。其中,所述传动组件40的结构形式可以有多种,例如所述传动组件40可以包括多个带轮和传送带的组合,或者所述传动组件40包括多个齿轮的组合,在此不一一列举。
69.所述壳体10的延伸方向和所述转动件20的延伸方向呈直角设置,即所述壳体10和所述转动件20组成的整体呈l型。所述壳体10安装有所述无刷电机30的部分与所述尘盒600
相邻设置,由于所述无刷电机30占用所述壳体10的宽度尺寸减少,从而可以预留出更大的空间用于安装尘盒600。
70.另一种实施方式中,所述转动件20为清洁辊。所述转动件20可以用于擦拭地面。其中,所述机器人主体300在底部设置有清洁仓500,所述转动件20可转动地安装于所述所述清洁仓500处。所述转动件20可以在所述无刷电机30的驱动下相对所述机器人主体300转动,进而滚动擦拭地面,以实现擦地的清洁效果。
71.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。