1.本实用新型涉及清洁设备领域,特别是涉及一种清洁机器人。
背景技术:
2.常见的清洁机器人包括有扫地机器人和拖地机器人,其机器主体内通常均设置有风道独立结构,风道独立结构与风机的输出端连通,风机的作用可以是在吸尘口形成负压,也可以是对拖擦件进行吹干。
3.清洁机器人的风道结构需要单独设置,并固定连接到清洁机器人内,其结构复杂,费时费力。
技术实现要素:
4.基于此,本实用新型的目的在于,提供一种具有结构简单特点的清洁机器人。
5.一种清洁机器人,包括:
6.上壳,所述上壳具有第一凹槽;
7.下壳,所述下壳具有第二凹槽,所述第二凹槽的位置与第一凹槽的位置相对应,所述下壳与上壳可拆卸连接,所述第二凹槽与第一凹槽连通形成与大气相通的气流通道;
8.风机组件,所述风机组件的输出端设置在所述气流通道内。
9.通过设置可拆卸连接的上壳和下壳,所述上壳和下壳分别具有第一凹槽和第二凹槽,所述第二凹槽的位置与第一凹槽的位置相对应,在所述下壳与上壳连接时,所述第二凹槽与第一凹槽连通形成与大气相通的气流通道,气流通道直接由上壳和下壳连接形成,无需另外设置单独的风道结构,比其传统的单独设置的风道结构,简化了结构,并且安装省时省力;风机组件的输出端设置在气流通道内,比起将该输出端固定在形成气流通道的侧壁上,气流通道的朝向不会被风道结构所限制。
10.进一步优选地,所述清洁机器人还包括:
11.安装腔;
12.控制组件,所述控制组件设置在所述安装腔内,所述风机组件与所述控制组件电连接;
13.第一通线孔,所述气流通道具有侧壁,所述第一通线孔设置在所述侧壁上,以连通所述气流通道与所述安装腔。
14.通过在气流通道的侧壁上设置第一通线孔,将所述气流通道与所述安装腔连通,风机组件的电源线或/和信号线等线体可以从气流通道通过该第一通线孔穿设到安装腔。
15.进一步优选地,所述清洁机器人,所述第一通线孔的位置设置在背离所述风机组件的输出端朝向的一侧,防止形成对流,减少气流从气流通道进入安装腔,改善气流通道将灰尘带入安装腔的问题。
16.进一步优选地,所述清洁机器人还包括:
17.第一开口,所述第一开口设置在所述第一凹槽上与所述第二凹槽的连接处,所述
上壳与下壳连接时,所述第一凹槽与所述第二凹槽在所述第一开口的位置形成所述第一通线孔。
18.通过直接在所述第一凹槽上与所述第二凹槽的连接处设置第一开口,线体可以先放置在该第一开口上,再将上壳和下壳连接形成第一通线孔,线体的安装非常方便,比起在安装腔或气流通道内设置线体的安装结构,结构简单,能够最大程度的在第一通线孔处缩小多根线体的直径,减少气流通过,这种结构改善了风道容易在线体贯穿处漏风的问题。
19.进一步优选地,所述清洁机器人还包括:
20.第二开口,所述第二开口设置在所述第二凹槽上,所述第二开口的位置与第一开口的位置相对应,所述上壳与下壳连接时,所述第一开口与所述第二开口连通形成所述第一通线孔。通过两个开口结合形成第一通线孔,比起在安装腔或气流通道内设置线体的安装结构,结构简单,能够最大程度的在第一通线孔处缩小多根线体的直径,减少气流通过。
21.进一步优选地,所述清洁机器人还包括:
22.第一线塞,所述第一线塞具有用于穿插线体的第一通孔,所述第一线塞与所述第一通线孔可拆卸连接,通过设置具有通孔的第一线塞,将第一线塞约束线体后再设置到第一通线孔上,无需在第一通线孔上将多根线体聚拢对准,安装省时省力,并且聚拢的位置直接设置在气流通道的侧壁上,最大程度的减少第一通线孔的尺寸,减少气流流通。
23.进一步优选地,所述第一线塞的周向方向具有环形槽,所述环形槽与所述第一通线孔相适配,可以通过将环形槽与第一开口嵌合,上壳和下壳连接时,第一线塞即可安装在第一通线孔上,并且不会发生移动。
24.进一步优选地,所述第一线塞为弹性的第一线塞,弹性的第一线塞可以更好的收纳线体,并且也可以便于穿过线体的接头。
25.进一步优选地,所述清洁机器人还包括:
26.行走轮安装座,所述行走轮安装座具有第三开口;
27.行走轮固定座,所述行走轮固定座具有第四开口,所述第四开口的位置与所述第三开口的位置相对应,所述行走轮安装座与所述行走轮固定座连接时,所述第三开口与第四开口形成第二通线孔。在行走轮安装座和行走轮固定座之间设置第二通线孔,可以用于穿设行走轮的驱动组件的电源线或/和信号线等线体。
28.进一步优选地,所述清洁机器人还包括:
29.第二线塞,所述第二线塞具有用于穿插线体的第二通孔,所述第二线塞与所述第二通线孔可拆卸连接。通过设置第二线塞,可以将线体设置在第二线塞上,再安装在第三开口或第四开口上,在行走轮安装座和行走轮固定座连接时,即可完成所述第二线塞与所述第二通线孔的可拆卸连接,安装省时省力,减少带有灰尘的外界气体通过行走轮安装座和行走轮固定座进入清洁机器人内部,这种结构改善了行走轮结构上的线体直接通过行走轮安装座上穿过,具有通孔形成漏风,灰尘容易从该通孔进入壳体的问题。
30.进一步优选地,所述清洁机器人还包括:
31.行走轮,所述行走轮与所述下壳铰接,所述第二通线孔设置在靠近所述铰接的一侧,该位置气流相对较少,进一步减少带有灰尘的外界气体通过行走轮安装座和行走轮固定座进入清洁机器人内部。
32.进一步优选地,所述行走轮安装座的顶壁具有第三通孔,所述上壳在该第三通孔
的位置具有环形密封垫,所述上壳与所述下壳连接时,所述环形密封垫将所述第三通孔围住形成密封,在行走轮安装座顶部形成密封,更进一步减少带有灰尘的外界气体通过行走轮安装座和行走轮固定座进入清洁机器人内部。
33.相对于现有技术,本实用新型的清洁机器人,通过设置可拆卸连接的上壳和下壳,所述上壳和下壳分别具有第一凹槽和第二凹槽,所述第二凹槽的位置与第一凹槽的位置相对应,在所述下壳与上壳连接时,所述第二凹槽与第一凹槽连通形成与大气相通的气流通道,气流通道直接由上壳和下壳连接形成,无需另外设置单独的风道结构,比其传统的单独设置的风道结构,简化了结构,并且安装省时省力;风机组件的输出端设置在气流通道内,比起将该输出端固定在形成气流通道的侧壁上,气流通道的朝向不会被风道结构所限制。本实用新型的清洁机器人具有结构简单和安装省时省力的特点。
34.为了更好地理解和实施,下面结合附图详细说明本实用新型。
附图说明
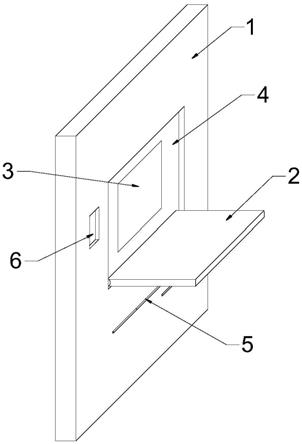
35.图1是本实用新型的上壳和下壳的安装示意图;
36.图2是第一线塞的结构示意图;
37.图3是图1中的a区域的局部放大图;
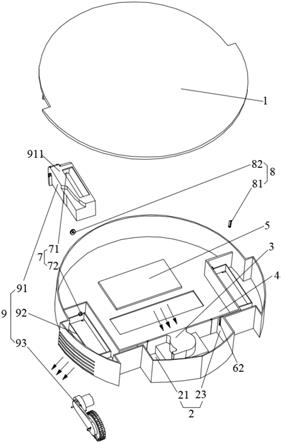
38.图4是本实用新型的清洁机器人的三维爆炸图;
39.图5是第二线塞的结构示意图;
40.图6是下壳的三维结构图;
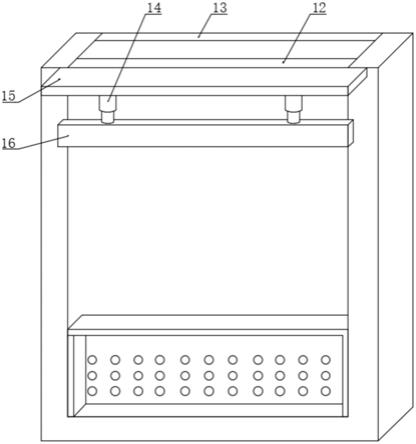
41.图7是另一实施方式的上壳和下壳的安装示意图。
具体实施方式
42.在本说明书中提到或者可能提到的上、下、左、右、前、后、正面、背面、顶部、底部等方位用语是相对于其构造进行定义的,它们是相对的概念。因此,有可能会根据其所处不同位置、不同使用状态而进行相应地变化。所以,也不应当将这些或者其他的方位用语解释为限制性用语。
43.以下示例性实施例中所描述的实施方式并不代表与本公开相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本公开的一些方面相一致的方法的例子。
44.在本公开使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本公开。在本公开和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
45.实施例
46.如图1至图3所示,图1是本实用新型的上壳和下壳的安装示意图,图2是第一线塞的结构示意图,图3是图1中的a区域的局部放大图。
47.本实用新型的清洁机器人,包括:
48.上壳1,所述上壳1具有第一凹槽11,上壳1还具有用于密封的环形密封垫12,该环形密封垫12用来将行走轮组件9的顶部进行密封,行走轮组件9可见图4;
49.下壳2,所述下壳2具有第二凹槽21,所述第二凹槽21的位置与第一凹槽11的位置相对应,所述下壳2与上壳1可拆卸连接,所述第二凹槽21与第一凹槽11连通形成与大气相通的气流通道22;气流通道22直接由上壳1和下壳2连接形成,无需另外设置单独的风道结构,比其传统的单独设置的风道结构,简化了结构,并且安装省时省力。气流通道22的导向可以以清洁机器人的前进行方向为前部,大致从下壳2的后部流通至后左侧或后右侧,此时在流通到达的位置具有通孔,以连通大气,将气流从气流通道22排出清洁机器人外。当然该气流通道22也可以以其他形式存在,均可以采用在上壳1设置第一凹槽11以及在下壳2设置第二凹槽21,通过第一凹槽11和第二槽相对应形成。优选的,在上壳1的第一凹槽11和下壳2的第二凹槽12的连接处可以进行密封连接,比如,将环绕形成第一凹槽11或/和第二凹槽12的侧板上设置台阶结构形成套接,即两者的连接面为台阶形状的壁面,气流不容易从该台阶结构的台阶面漏出。又如,在上壳1的第一凹槽11和下壳2的第二凹槽12的连接处设置环形的密封垫圈。
50.风机组件3,所述风机组件3的输出端31设置在所述气流通道22内。风机组件3的输出端31设置在气流通道22内,比起将该输出端31固定在形成气流通道22的侧壁23上,气流通道22的朝向不会被风道结构所限制。该风机组件3的输入端可以连接尘盒,尘盒的入口可以连通朝向地面的吸尘口。
51.安装腔4,可以选择的用来设置边扫组件、中扫组件和控制组件5等部件;安装腔4可以由所述上壳1和下壳2连接形成,比如,在本实施例中,安装腔4的形成与气流通道22的形成原理相同,上壳2设置有第三凹槽,下壳2设置有第四凹槽,由第三凹槽和第四凹槽连接形成。在其他实施例中,安装腔4也可以是设置在上壳1和下壳2之间的安装壳,该安装壳具有安装腔4。
52.控制组件5,所述控制组件5设置在所述安装腔4内,所述风机组件3与所述控制组件5电连接;
53.第一通线孔6,在本实施例中,第一通线孔6即由下壳2的第一开口61,及上壳1与开口平齐的抵接面形成。所述气流通道22具有侧壁23,所述第一通线孔6设置在所述侧壁23上,以连通所述气流通道22与所述安装腔4。通过在气流通道22的侧壁23上设置第一通线孔6,将所述气流通道22与所述安装腔4连通,风机组件3的电源线或/和信号线等线体可以从气流通道22通过该第一通线孔6穿设到安装腔4。其中,在本实施例中,下壳2具有用于阻挡气流的阻挡板24,线体从气流通道22连通至安装腔4,设置有所述阻挡板24时,可以在阻挡板24上设置通孔以连通。在其他实施例中,也可以将阻挡板24去除,通过行走轮安装座91阻挡大部分从第一通线孔6流通至安装腔4的气流。在其他实施例中,第一通线孔6也可以是其他形式,可见图7。
54.为了形成将气流通道22连通至安装腔4的通线孔,对应可以在上壳1或/和下壳2上设置有开口,在本实施例中,在下壳2上设置有第一开口61,此时上壳1上对应的位置未设置第二开口62,下壳2上对应的位置为与开口平齐的抵接面,所述第一开口61设置在所述第一凹槽11上与所述第二凹槽21的连接处,所述上壳1与下壳2连接时,所述第一凹槽11与所述第二凹槽21在所述第一开口61的位置形成所述第一通线孔6,即第一开口61与该抵接面形成第一通线孔6。通过直接在所述第一凹槽11上与所述第二凹槽21的连接处设置第一开口61,线体可以先放置在该第一开口61上,再将上壳1和下壳2连接形成第一通线孔6,线体的
安装非常方便,比起在安装腔4或气流通道22内设置线体的安装结构,结构简单,能够最大程度的在第一通线孔6处缩小多根线体的直径,减少气流通过,这种结构改善了风道容易在线体贯穿处漏风的问题。在其他实施例中,也可以在上壳1上设置第一开口61,此时下壳2上对应的位置未设置第二开口62,下壳2上对应的位置为与开口平齐的抵接面,同样可以形成第一通线孔6。在变形例中,也可以在下壳2上设置第一开口61,并在上壳1上对应的位置设置第二开口62,通过第一开口61和第二开口62共同围成第一通线孔6,具体可见图7。
55.考虑到对流问题,所述第一通线孔6的位置设置在背离所述风机组件3的输出端31朝向的一侧,防止形成对流,减少气流从气流通道22进入安装腔4,改善气流通道22将灰尘带入安装腔4的问题。
56.为了进一步减少气流通道22进入安装腔4的气流,以及便于安装,所述清洁机器人还包括:
57.第一线塞81,所述第一线塞81具有用于穿插线体的第一通孔812,线体可以是风机组件3的电源线或/和信号线,所述第一线塞81与所述第一通线孔6可拆卸连接,通过设置具有通孔的第一线塞81,将第一线塞81约束线体后再设置到第一通线孔6上,无需在第一通线孔6上将多根线体聚拢对准,安装省时省力,并且聚拢的位置直接设置在气流通道22的侧壁23上,最大程度的减少第一通线孔6的尺寸,减少气流流通。具体的,所述第一线塞81的周向方向具有环形槽811,所述环形槽811与所述第一通线孔6相适配,可以通过将环形槽811与第一开口61嵌合,上壳1和下壳2连接时,第一线塞81即可安装在第一通线孔6上,并且不会发生移动。所述第一线塞81为弹性的第一线塞81,弹性的第一线塞81可以更好的收纳线体,并且也可以便于穿过线体的接头。在本实施例中,由于在上壳1上未设置第二开口62,该环形槽811也对应呈半封闭式,以适配第一通线孔6,半封闭式即周向不完整的环形槽811。在其他实施例中,在上壳1上设置了第二开口62,该环形槽811可以设置成封闭式,封闭式即周向完整的环形槽811。第一线塞81可以是圆键形状,也可以是圆形或方形,也可以是其他形状。
58.如图4至图6所示,图4是本实用新型的清洁机器人的三维爆炸图,图5是第二线塞的结构示意图,图6是下壳的三维结构图。
59.为了清洁机器人能够行走,在上壳1与下壳2之间设置有行走轮组件9,以及设置行走轮9的容纳结构,具体的,所述清洁机器人还包括:
60.行走轮9,所述行走轮9与所述下壳2铰接,所述第二通线孔7设置在靠近所述铰接的一侧,该位置气流相对较少,进一步减少带有灰尘的外界气体通过行走轮安装座91和行走轮固定座92进入清洁机器人内部。
61.行走轮安装座91,所述行走轮安装座91具有第三开口71;
62.行走轮固定座92,所述行走轮固定座92具有第四开口72,所述第四开口72的位置与所述第三开口71的位置相对应,所述行走轮安装座91与所述行走轮固定座92连接时,所述第三开口71与第四开口72形成第二通线孔7。在行走轮安装座91和行走轮固定座92之间设置第二通线孔7,可以用于穿设行走轮9的驱动组件的电源线或/和信号线等线体。所述行走轮安装座91的顶壁具有第三通孔911,所述上壳1在该第三通孔911的位置具有环形密封垫12,所述上壳1与所述下壳2连接时,所述环形密封垫12将所述第三通孔911围住形成密封,在行走轮安装座91顶部形成密封,更进一步减少带有灰尘的外界气体通过行走轮安装
座91和行走轮固定座92进入清洁机器人内部。该环形密封垫12具体见图1或图7。
63.考虑到外界的灰尘或垃圾可能通过行走轮组件9进入清洁机器人的内部,所述清洁机器人还包括:
64.第二线塞82,所述第二线塞82具有用于穿插线体的第二通孔821,所述第二线塞82与所述第二通线孔7可拆卸连接。通过设置第二线塞82,可以将线体设置在第二线塞82上,再安装在第三开口71或第四开口72上,在行走轮安装座91和行走轮固定座92连接时,即可完成所述第二线塞82与所述第二通线孔7的可拆卸连接,安装省时省力,减少带有灰尘的外界气体通过行走轮安装座91和行走轮固定座92进入清洁机器人内部,这种结构改善了行走轮结构上的线体直接通过行走轮安装座上穿过,具有通孔形成漏风,灰尘容易从该通孔进入壳体的问题。在本实施例中,第二线塞82为圆柱形的第二线塞82,并且与第一线塞81一样具有弹性和环形槽811,其由于在上壳1上设置了第二开口62,该环形槽811可以设置成封闭式,封闭式即周向完整的环形槽811。在其他实施例中,第二线塞82可以是圆键形状,也可以是方形,也可以是其他形状。在变形例中,由于在上壳1上未设置第二开口62,该环形槽811也对应呈半封闭式,以适配第二通线孔7,半封闭式即周向不完整的环形槽811。
65.考虑到控制部件5积灰容易发生故障,在上壳1和下壳2之间设置了安装腔4,安装腔4与气流通道22可以通过第一通线孔7连通,安装腔4上设置有控制部件5。
66.值得注意的是,下壳2上设置有第二凹槽21以及侧壁23,第二开口62设置在侧壁23上,第一线塞81可以先设置在该第二开口62上,风机组件3可以通过螺纹连接等可拆卸连接方式设置在该第二凹槽21上。
67.如图7所示,图7是另一实施方式的上壳和下壳的安装示意图。
68.在另一实施例中,所述清洁机器人除了包括设置在第一凹槽11上的第一开口61,还包括:
69.第二开口62,所述第二开口62设置在所述第二凹槽21上,此时第一开口61和第二开口62均设置在上壳1和下壳2的形成气流通道22的连接处,所述第二开口62的位置与第一开口61的位置相对应,所述上壳1与下壳2连接时,所述第一开口61与所述第二开口62连通形成所述第一通线孔6。通过两个开口结合形成第一通线孔6,比起在安装腔4或气流通道22内设置线体的安装结构,结构简单,能够最大程度的在第一通线孔6处缩小多根线体的直径,减少气流通过。
70.相对于现有技术,本实用新型的清洁机器人,通过设置可拆卸连接的上壳1和下壳2,所述上壳1和下壳2分别具有第一凹槽11和第二凹槽21,所述第二凹槽21的位置与第一凹槽11的位置相对应,在所述下壳2与上壳1连接时,所述第二凹槽21与第一凹槽11连通形成与大气相通的气流通道22,气流通道22直接由上壳1和下壳2连接形成,无需另外设置单独的风道结构,比其传统的单独设置的风道结构,简化了结构,并且安装省时省力;风机组件3的输出端31设置在气流通道22内,比起将该输出端31固定在形成气流通道22的侧壁23上,气流通道22的朝向不会被风道结构所限制。本实用新型的清洁机器人具有结构简单和安装省时省力的特点。
71.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于
本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。