1.本发明涉及家具技术领域,尤其涉及一种具有防夹功能的储物床。
背景技术:
2.随着人们生活水平不断地提高,人们越来越热衷于多功能的家具,普通家具在满足并实现基本功能的同时,其附加功能越来越受到人们的重视,例如,具有储物功能的储物床;该储物床不仅能够实现支撑床垫的基本功能,还能够作为储放物件的储物箱。
3.但是,现有储物床是采用了具有双向驱动力(具有推力和拉力) 的电动推杆作为驱动源,床板框架的抬升与下降均为刚性动作,床板框架在下降复位过程中,发现夹腿、夹手等情况时不能及时停止而导致伤害继续;或者存放物品过大而顶住床板框架时不能及时发现,导致电动推杆损坏或者物品被破坏,造成损失。
技术实现要素:
4.为克服上述现有技术所述的缺陷,本使用新型提出了一种具有防夹功能的储物床。
5.本发明为解决其问题所采用的技术方案是:
6.一种具有防夹功能的储物床,包括:
7.具有储物腔的床体;
8.盖合于所述床体上的床板框架;
9.设置于所述床体与床板框架之间的连杆机构;
10.仅能单一方向向前推动的单向电动推杆,所述单向电动推杆铰接于所述连杆机构与床体之间,所述单向电动推杆的伸缩端伸长以驱动所述连杆结构旋转,所述连杆结构推动所述床板框架抬升。
11.本发明提供的具有防夹功能的储物床,通过仅能单一方向向前推动的单向电动推杆以驱动床板框架刚性抬升,利用床板框架的自重实现下降复位,当在下降复位过程中意外夹持到异物时,其夹持力由床板框架的自重提供,可通过手动或自动抬升床板框架以轻松解除夹持,提高了使用安全性,避免了床板框架在下降复位过程中发生夹持异物并加重损伤的问题。
12.进一步地,所述单向电动推杆包括电机、与所述电机传动配合的推杆驱动机构以及滑动推杆,所述推杆驱动机构包括丝杆以及与所述丝杆相配合的丝杆螺母,所述滑动推杆的后端可沿所述丝杆的轴线方向滑动地套设于所述丝杆螺母的前端,所述滑动推杆不随所述丝杆螺母的向后移动而移动。
13.进一步地,所述单向电动推杆还包括用于导向滑动推杆的固定导杆,所述固定导杆与电机相连接。
14.进一步地,还包括驱动控制电路,所述驱动控制电路包括控制单元以及检测单元,其中,所述控制单元接收控制所述单向电动推杆动作的指令,并输出控制信号驱动所述单
向电动推杆动作;所述检测单元用于实时检测所述单向电动推杆的运行状态,并输出对应的检测信号至所述控制单元,由所述控制单元依据所述检测信号判断是否重新配置所述控制信号的输出。
15.进一步地,所述单向电动推杆在收缩过程中,所述检测信号反应出所述床板框架出现夹住异物时,所述控制单元重新配置所述控制信号的输出以控制所述单向电动推杆反向运转,从而抬升所述床板框架。
16.进一步地,所述检测单元采样所述单向电动推杆工作状态的电流信号,并进行解析后输出所述检测信号。
17.进一步地,所述检测单元包括检测电路,所述检测电路包括第一采样电阻、第二采样电阻和比较器,所述第一采样电阻的一端和所述第二采样电阻的一端连接在一起作为所述检测电路的输入端,用于采样所述单向电动推杆工作状态的电流信号;所述第一采样电阻的另一端连接所述比较器的负输入端,所述比较器的正输入端输入参考电压,所述比较器的输出端输出所述检测信号至所述控制单元,所述第二采样电阻的另一端接地。
18.进一步地,所述的控制单元接收指令的方式为无线方式。
19.进一步地,所述单向电动推杆设置有两个,两所述单向电动推杆相对设置于所述床体的两侧,所述控制单元驱动两所述单向电动推杆同步动作;所述检测电路设置有两路,两路所述检测电路分别对应检测一所述单向电动推杆的运行状态。
20.进一步地,所述驱动控制电路还包括用于将所述控制信号放大的放大单元。
21.综上所述,本发明提供的储物床,具有如下技术效果:
22.1)单向电动推杆在收缩过程中,床板框架在自身重力作用下随之下降复位,当在下降复位过程中意外夹持异物时,其夹持力由床板框架的自重提供,可通过手动或自动抬升床板框架以轻松解除夹持,提高了使用安全性,避免了床板框架在下降复位过程中发生夹持异物并加重损伤的问题;
23.2)通过控制电路检测单向电动推杆的工作状态并控制单向电动推杆的动作,以便在出现夹持异物时,能够驱动单向电动推杆反向运转以抬升床板框架,从而解除夹持,进一步提高了使用安全性,亦可起到提醒的作用。
附图说明
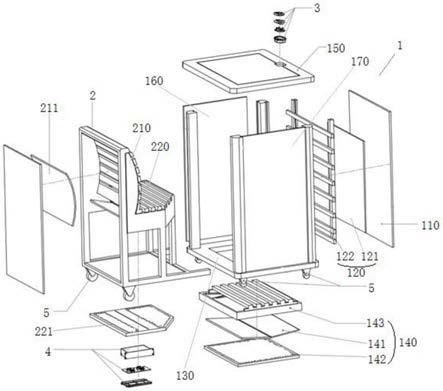
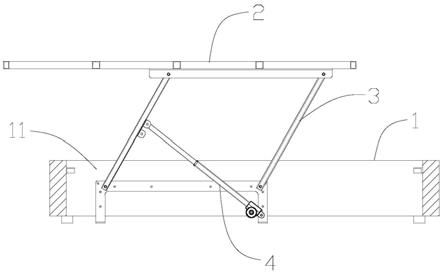
24.图1为本发明实施例1的储物床的结构示意图;
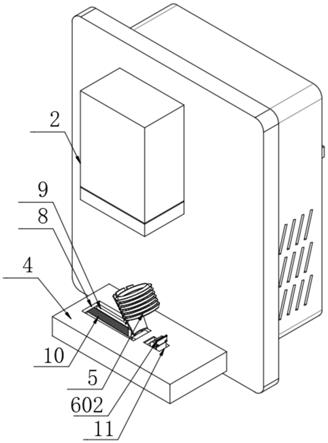
25.图2为本发明实施例1的单向电动推杆的结构示意图;
26.图3为本发明实施例1的单向电动推杆的爆炸示意图;
27.图4为本发明实施例2的驱动控制电路的原理图;
28.图5为本发明实施例2的驱动控制电路的电路图。
29.附图标记说明:
30.1、床体;11、储物腔;2、床板框架;3、连杆机构;4、单向电动推杆;41、电机;411、第一连接部;42、推杆驱动机构;421、丝杆;422、丝杆螺母;43、滑动推杆;431、第二连接部;44、固定导杆。
具体实施方式
31.下面,结合附图以及具体实施方式,对本发明做进一步描述:
32.在本发明的描述中,需要说明的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体地实施例的目的,不是旨在限制本发明。
34.实施例1
35.参阅图1至图3,本发明提供了一种具有防夹功能的储物床,该储物床包括具有储物腔11的床体1、盖合于所述床体1上的床板框架2、连杆机构3以及单向电动推杆4,连杆机构3设置于床体1与床板框架2之间以作为支撑部件,单向电动推杆4铰接于连杆机构3 与床体1之间以作为电动驱动源。
36.其中,单向电动推杆4仅能单一方向向前推动,具体地,单向电动推杆4的伸缩端伸长以驱动连杆结构3旋转,连杆结构3推动床板框架2抬升。
37.可以理解的是,本发明中的床体1、床板框架2以及连杆机构3 为现有技术,本领域技术人员可根据需要选定能够实现该储物床相关功能的床体1、床板框架2以及连杆机构3,且床体1、床板框架2 以及连杆机构3的具体结构并非本发明的创新点,故在此不再赘述。
38.在本发明中,单向电动推杆4仅作用于驱动床板框架2的抬升,而在单向电动推杆4收缩过程中,床板框架2能够在其自身重力作用下随着单向电动推杆4的收缩动作以实现下降复位。
39.以图1为参考,该储物床的具体动作如下:单向电动推杆4正向得电时,单向电动推杆4的伸缩端伸长并提供推力,以驱动连杆结构 3逆时针旋转,连杆结构3逆时针旋转时能够推动床板框架2抬升;单向电动推杆4反向得电时,单向电动推杆4的伸缩端收缩但并没有提供拉力,在床板框架2的自身重力作用下,床板框架2能够驱动连杆结构3顺时针旋转,从而实现下降复位,当然,床板框架2的下降速率与单向电动推杆4的收缩速率相对应。
40.基于上述方案,其中一有益应用效果如下:当在下降复位过程中意外夹持人的手脚时,其夹持力由床板框架2的自重提供,可通过手动或自动抬升床板框架2以轻松解除夹持,提高了使用安全性,避免了床板框架2下降时意外夹手脚而不能及时停止导致伤害继续的问题。
41.另一有益应用效果如下:当在下降复位过程中,存放在储物腔 11内的物品过大而出现顶住床板框架2时,其夹持力同样由床板框架2的自重提供,能够避免电动驱动源持续输出拉力而导致电动推杆损坏或者物品被破坏,造成损失。
42.参阅图2和图3,在本实施例中,单向电动推杆4包括电机41、与电机41传动配合的推杆驱动机构42以及滑动推杆43,该推杆驱动机构42包括丝杆421以及与丝杆421相配合的丝杆螺母422,滑动推杆43的后端可沿丝杆421的轴线方向滑动地套设于丝杆螺母422 的前端,其中,滑动推杆43不随丝杆螺母422的向后移动而移动。可以理解的是,电机41的外壳上设置有第一连接部411,滑动推杆 43的前端设置有第二连接部431,以实现单向电动推杆4
与储物床结构其他部件的连接。
43.可以理解的是,第一连接部411与第二横杆123上的第一连接件 1131铰接,第二连接部431与第一横杆21铰接;或者,第一连接部 411与第一横杆21铰接,第二连接部431与第二横杆123上的第一连接件1131铰接。
44.较佳的,该单向电动推杆4还包括用于导向滑动推杆43的固定导杆44,该固定导杆44与电机41的外壳固定连接,滑动推杆43滑动穿设于固定导杆44内,且滑动推杆43的前端露出固定导杆44远离电机41的一端。
45.通过上述结构,滑动推杆43可在床板框架2的重力作用下自动复位,结构简单便捷,生产成本低,便于大范围推广。
46.同时,利用固定导44杆以导向滑动推杆43,便于解除夹持后滑动推杆43的复位,同时可防止滑动推杆43径向转动;另一方面,固定导杆44还可对丝杆螺母422起到导向作用,以及便于在固定导杆 44上安装行程开关以控制该单向电动推杆4的伸缩行程。
47.结合上述结构,本发明提供单向电动推杆4的工作过程如下:
48.(1)床板框架2的抬升:电机41通电正转,丝杆421驱动丝杆螺母422远离电机41移动,丝杆螺母422将滑动推杆43向前推动,滑动推杆43驱动连杆结构3旋转以推动床板框架2抬升;当床板框架2展开至预定位置后,电机41抱死以实现床板框架2的锁定。
49.(2)床板框架2的下降复位:电机41通电反转,丝杆421驱动丝杆螺母422朝向电机41移动,在床板框架2的重力作用下,滑动推杆43保持抵接于动丝杆螺母422;当意外夹持到人的手脚时,产生的阻力克服床板框架2的重力,床板框架2停止下降,滑动推杆 43脱离动丝杆螺母422,以此防止伤害继续,避免严重夹伤。
50.在本实施例中,单向电动推杆4设置有两个,两单向电动推杆4 相对设置于所述床体的两侧,以实现床板框架2的平衡抬升。
51.当然,在其他较佳实施例中,单向电动推杆4还可仅设置有一个,该单向电动推杆4可设置于床体1的储物腔11中间位置处或者可设置于床体1的一侧。
52.实施例2
53.参阅图4和图5,本实施例与实施例1的区别仅在于,该储物床还包括驱动控制电路,该驱动控制电路能够检测单向电动推杆4的工作状态并控制单向电动推杆4的动作。
54.在本实施例中,驱动控制电路包括控制单元和检测单元,其中,控制单元能够接收控制单向电动推杆4动作的指令en并输出控制信号,控制信号驱动单向电动推杆4动作;检测单元用于实时检测单向电动推杆4的运行状态,并输出对应的检测信号至控制单元,由控制单元依据检测信号判断是否重新配置控制信号的输出。
55.可以理解的是,在正常下降复位过程中,由于床板框架2是随着单向电动推杆4的收缩而下降的,此时,床板框架2的重力还是能够通过连杆结构3作用于单向电动推杆4,即单向电动推杆4承载有一定的载荷;当在下降复位过程中夹持到异物时,床板框架2停止下降,而单向电动推杆4保持收缩,此时,床板框架2的重力不能作用于单向电动推杆4,即可以视为单向电动推杆4处于基本空转的状态。因此,单向电动推杆4的载荷不同,将导致其工作状态的不同。
56.较佳的,检测单元可通过采样单向电动推杆4工作状态的电流信号,对该电流信号进行解析后输出检测信号。
57.其中,驱动控制电路具体作用于单向电动推杆4中的电机41,为了便于结合电路图以理解本发明,下文将两个单向电动推杆4中的电机41分别定义为电机m1和电机m2。
58.可以理解的是,驱动控制电路还包括四个开关器件,即双刀单掷继电器k11、k12、k21和k22,四个开关器件用于接通电机m1和电机m2正转或反转的供电回路。
59.具体地,控制单元接收控制电机m1和电机m2动作的指令en,并进行解析后输出控制信号s11和s12、控制信号s21和s22,控制信号s11和s12、控制信号s21和s22分别驱动电机m1和电机m2同步动作;检测单元包括多路检测电路,具体为第一检测电路、第二检测电路、第三检测电路和第四检测电路,各路检测电路的具体作用为:第一检测电路用于检测第一个单向电动推杆4收缩时的运行状态,并具体输出检测信号sc11;第二检测电路用于检测第一个单向电动推杆4伸长时的运行状态,并具体输出检测信号sc12;第三检测电路用于检测第二个单向电动推杆4收缩时的运行状态,并具体输出检测信号sc21;第四检测电路用于检测第二个单向电动推杆4伸长时的运行状态,并具体输出检测信号sc22。由控制单元依据检测信号检测信号sc11、sc12、sc21和sc22判断如何配置输出控制信号s11、 s12、s21和s22,进而实现控制电机m1和电机m2的运行。
60.具体地,双刀单掷继电器k11和k12的动触点接触到不同的静触点能够使得电机m1正转或者反转,双刀单掷继电器k21和k22的动触点接触到不同的静触点能够使得电机m2正转或者反转,下面以电机m1为例,对通过控制继电器k11、继电器k12的执行动作,实现电机m1动作的逻辑说明如下:
61.(1)控制信号s11使得继电器k11的动触头接触到静抽头111、控制信号s12使得继电器k12的动触头接触到静抽头121,电机m1 被短路,此时电机m1处于故障状态;
62.(2)控制信号s11使得继电器k11的动触头接触到静抽头111、控制信号s12使得继电器k12的动触头接触到静抽头122,电机m1 反向得电,电机m1反转;
63.(3)控制信号s11使得继电器k11的动触头接触到静抽头112、控制信号s12使得继电器k12的动触头接触到静抽头121,电机m1 正向得电,电机m1正转;
64.(4)控制信号s11使得继电器k11的动触头接触到静抽头112、控制信号s12使得继电器k12的动触头接触到静抽头122,电机m1 同样被被短路,此时电机m1处于故障状态。
65.在上述的电机m1动作逻辑说明的第二项中,单向电动推杆4收缩,此时,第一检测电路检测该电机m1的工作状态,当床板框架2 夹持到异物时,第一检测电路输出检测信号sc11至控制单元,控制单元判断后重新配置控制信号s11并跳转至上述的电机m1动作逻辑说明的第四项,以使得电机m1正向得电,电机m1开始正转,单向电动推杆4伸长从而抬升床板框架2。基于此,以便在出现夹持异物时,能够驱动单向电动推杆4反向运转以抬升床板框架2,从而解除夹持,进一步提高了使用安全性;且当发现床板框架2自动抬升时,能够提醒使用者出现了夹持情况。
66.同样的,控制单元和第三检测电路对电机m2的控制,具有与电机m1相同的作用与动作原理,故不赘述。
67.通过上述控制逻辑分析可知,要使得电机m1和电机m2同步动作,继电器k11、继电器k12、继电器k21和继电器k22所获得的控制信号应该实现如下配置:
68.(1)当需要电机m1和电机m2同步正转时,继电器k11的动触头接触到静抽头112、继电器k12的动触头接触到静抽头121,继电器k21的动触头接触到静抽头212、继电器k22的动
触头接触到静抽头221;
69.(2)当需要电机m1和电机m2同步反转时,继电器k11的动触头接触到静抽头111、继电器k12的动触头接触到静抽头122,继电器k21的动触头接触到静抽头211、继电器k22的动触头接触到静抽头222。
70.可以理解的是,本实施例的控制单元采用的是单片机,例如可以选用英瑞恩公司生产的型号为en8f156p16,本实施例搭配收发模块,如金升阳公司生产的can收发器或者rs485收发器,可以实现无线控制,通过手机app发送指令en,收发模块接收到指令后给单片机解析,输出控制信号s11、s12、s21、s22。
71.由于继电器驱动需要的电流要比单片机输出的控制信号s11、 s12、s21、s22的电流大,如果用控制信号s11、s12、s21、s22直接驱动继电器,不但驱动不理想,还会大大增加单片机的运行负荷破坏单片机的稳定性,故本实施例还设置了放大单元,将控制信号s11、 s12和控制信号s21、s22放大为驱动信号l11、l12和驱动信号l21、 l22后分别驱动所述的电机m1和所述的电机m2同步动作。
72.具体地,三极管q11和电阻r11构成第一放大电路,电阻r11的一端输入控制信号s11,电阻r11的另一端连接三极管q11的基极,三极管的集电极输出驱动信号l11,三极管的集电极接地,其中的电阻r11为偏置电阻,为三极管q11注入基极电流,使三极管q11工作在放大区,从而将其基极输入的电流信号放大后输出,在三极管q11 的栅极和发射极之间也可以再增加一只电阻,用于改善和稳定三极管 q11发射结的导通特性,使栅极和发射极之间的压降更稳定,进一步地,还可以在三极管q11的栅极和集电极之间再增加一只电阻,此时这两个电阻能够为三极管q11提供稳定的静态工作点。
73.图5中还包括三极管q12和电阻r12构成第二放大电路、三极管q21和电阻r21构成第三放大电路,以及三极管q22和电阻r22构成第四放大电路,作用与工作原理与第一放大电路相同,故不赘述。
74.图5中的第一检测电路包括电阻r111、电阻r112和比较器a11,电阻r111的一端和电阻r112的一端连接在一起作为检测电路的输入端,连接至继电器的静触点111,该连接点的电流流经电阻r111、电阻r112分压后在电阻r111的另一端产生一电压值,该电压值能反应电机m1的运行状态,该电压值被输入至比较器a1的向输入端,比较器a1的正输入端输入参考电压vref,比较器a1将其正向输入端和负向输入端的信号进行比较后输出检测信号sc11。
75.图5中的第二检测电路包括电阻r121、电阻r122和比较器a12,第三检测电路包括电阻r211、电阻r212和比较器a21,第四检测电路包括电阻r221、电阻r222和比较器a22,它们的连接关系和工作原理均与第一检测电路相同,故不赘述。
76.比较器a11输出的检测信号sc11、比较器a12输出的检测信号 sc12、比较器a21输出的检测信号sc21和比较器a22输出的检测信号sc22被输入至单片机,单片机据此分析电机的运行状态,当分析出电机的运行出现异常时,重新配置控制信号s11、s12、s21和s22 的输出,避免对电机所驱动的下位装置的稳定性、可靠性或者安全性等产生影响。
77.需要说明的是,图4和图5中第一至第四检测电路的输入端分别连接至静触点111、121、211和222只是示意,本领域的技术人员可以理解的是根据实际的功能需要,还可以设置更多的检测电路,或者复用第一至第四检测电路,将传感器等检测手段获得的能反应电
机运行状态的电流信号输入至这些检测电路的输入端,实现储物床功能的多样化,除了上述所讲到的防夹持功能外,本发明还能够识别并处理的异常情况包括但不限于如下情形:
78.(1)当其中一个单向电动推杆4出现故障或者损坏,造成两个单向电动推杆4不能同时动作时,本发明能停止对另外一个单向电动推杆4输出控制信号,确保储物床床体的平衡;
79.(2)当其中一个单向电动推杆4中的开关器件被误触发而动作时,本发明的检测单元能够予以识别,由控制单元停止对该误动作的单向电动推杆4输出控制信号,避免储物床被损坏;
80.(3)当两个单向电动推杆4的行程不一致时,本发明的检测单元能够予以识别,并由控制单元调整控制信号的输出,如对运行较快的单向电动推杆4暂停输出控制信号,实现对运行较慢的单向电动推杆4的行程补偿,使得两个单向电动推杆4的行程一致,保障储物床床体的平衡。
81.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。