车辆制动系统及其操作方法
1.相关申请的交叉引用
2.本技术基于并要求2020年5月11日提交的韩国专利申请10
‑
2020
‑
0055788的优先权,其全部公开内容通过引用合并于此。
技术领域
3.在一些实施例中,本公开涉及一种制动系统及其控制方法。
背景技术:
4.该部分中的描述仅提供与本公开有关的背景信息,并且不一定构成现有技术。
5.随着车辆自动驾驶技术的日益活跃的发展,关于自动驾驶车辆的驾驶稳定性的问题正在出现。在驾驶自动驾驶车辆时,在减速或制动过程中的制动系统发生异常时,发生事故的风险增加。
6.作为现有技术的解决方案,在制动系统出现问题的情况下,已经在车辆中额外安装了辅助制动器。根据一般定义,主制动器的控制单元是主控制器单元(main controller unit,mcu),而辅助制动器的控制单元是冗余控制器单元(redundancy controller unit,rcu)。当mcu检测到主制动器损坏时,它会通过车辆的控制器局域网(controller area network,can)通信将损坏信息传输到rcu。相应地,rcu从mcu接管对车辆制动系统的控制,并参与车辆制动。利用这种制动系统和控制方法,可以确保车辆的制动性能的冗余。
7.然而,现有技术涉及由于mcu通过can通信将故障通知发送到rcu而在rcu的备用时间上发生延迟。can通信一般具有10ms的通信周期。mcu耗费20ms将故障信号通知rcu并转移控制。因此,在20ms的周期内,主制动系统保持在空白时间,以使其异常运行,而辅助制动系统则无权转移控制权。当车辆以高速行驶时,20ms的空白可能对驾驶员的安全是致命的。
技术实现要素:
8.根据至少一个实施例,本公开提供了一种制动系统,包括:主制动器、辅助制动器、信号总线和通信单元。主制动器被配置和设置为将制动力提供到车辆的每个车轮。所述主制动器上发生故障时,所述辅助制动器被配置和设置为代替所述主制动器运行。所述信号总线包括布置在主制动器和辅助制动器之间的至少一个或多个有线设备,并且被配置为在主制动器和辅助制动器之间传输指示存在或不存在故障的信号。所述通信单元被配置和设置为在主制动器和辅助制动器之间传输和接收操作状态信息。在此,所述辅助制动器响应于通过信号总线的主制动器的故障信号的检测,用于实施为车辆的每个车轮提供制动力的准备。
9.根据另一个实施例,本公开提供了一种用于控制车辆的制动系统的方法,包括:通过主制动器的控制单元检测主制动器的故障,并且当确定在所述主制动器上发生故障时,通过数字信号将有关故障的信息传输到辅助制动器,并且一旦接收到数字信号,则由辅助制动器实施准备,以向车辆的每个车轮提供制动力,并且将有关所述主制动器的故障的原
因的信息传输到所述辅助制动器,并且当确定所述主制动器已失去制动功能时,由所述辅助制动器从所述主制动器接收提供制动力的控制的转移。
附图说明
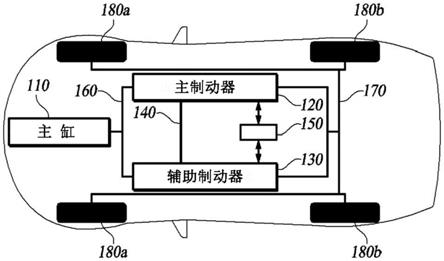
10.图1为根据本公开的至少一个实施例的制动系统的示意图。
11.图2为根据本公开的至少一个实施例的车辆正常操作时的制动系统的框图。
12.图3为根据本公开的至少一个实施例的主制动器发生故障时车辆的制动系统的框图。
13.图4为根据本公开的至少一个实施例的一种制动系统的控制方法的流程图。
具体实施方式
14.因此,在至少一个实施例中,本公开旨在改进制动系统中的辅助制动器的备用性能。
15.下面参考附图描述本公开的一些示例性实施例。在以下的描述中,相同的附图标记优选地指示相同的元件,尽管所述元件在不同的附图中示出。另外,在一些实施例的以下描述中,为了清楚和简洁,将省略并入本文的已知功能和配置的详细描述。
16.此外,在使用字母数字编码,如第一,第二,i),ii),a),b)等描述各组件仅是出于将一个组件与另一个组件区分开的目的,而不是暗指或主张物质、顺序,或组件的序列。在整个说明书中,当部件“包括”或“包含”一个组件时,其意味着还包括其他组件,不排除其他组件,除非有与之相反的特定描述。
17.图1为根据本公开的至少一个实施例的制动系统的示意图。
18.如图1所示,制动系统可以包括以下中的一些或全部:主缸110,主制动器或主制动系统120,辅助制动器或辅助制动系统130和信号总线140,通信单元150,第一流动路径160,第二流动路径170和车轮180a、180b。
19.主缸110被配置为具有至少一个腔室以产生液压。主缸110是通过产生液压来排出制动液的装置。
20.第一流动路径160是制动液在主缸110与主制动器120之间以及在主缸110与辅助制动器130之间移动的通道。与其中主制动器120和辅助制动器130并联布置的图1不同,它们可以串联连接。在这种情况下,第一流动路径160仅设置在主缸110与主制动器120之间。
21.第二流动路径170是用于将从主制动器120和辅助制动器130产生的液压提供给每个车轮180a、180b的通道。图1中所示的第二流动路径170示意性地示出了液压的流动,并且所述第二流动路径170不限于图1所示的布置。
22.信号总线140设置在主制动器120和辅助制动器130之间,并且包括一个或多个导体,该导体适于在主制动器120和辅助制动器130之间传输指示存在或不存在故障的数字信号。数字信号包括第一信号(高)和第二信号(低)。
23.例如,在其正常操作中,主制动器120通过信号总线140将第一信号传输到辅助制动器130。反之,当主制动器120的电源关闭时,第二信号被传输到辅助制动器130。使用这些信号,主制动器120和辅助制动器130可以彼此监控。传输第一信号和第二信号耗费的时间少于1ms。
24.通信单元150被设置为向主制动器120和辅助制动器130传输和从主制动器120和辅助制动器130接收操作状态信息。通信单元150可以使用控制器局域网(can)通信。通信单元150用于在主制动器120和辅助制动器130之间以及在车辆中需要通信的组件之间传输和接收信号。
25.通常,通信单元150的信号传输周期约为10ms。例如,当主制动器120发生异常情况时,主制动器120可以通过can通信将异常情况通知给辅助制动器130并传输用于将制动系统的制动控制权转移到辅助制动器130的信号,这将耗费约20ms。
26.主制动器120被配置为向各个车轮提供制动力。主制动器120从制动踏板的输入端接收电信号,并通过机械操作在流体中产生液压。主制动器120可以实施防抱死制动系统(anti
‑
lock brake system,abs)、电子稳定控制系统(electric stability control,esc)等的功能,它们是安全驾驶功能,同时单独控制提供给各个车轮的液压。
27.主制动器120包括以下中高端一些或全部:液压泵、被设置为驱动液压泵的电机、被配置为向各车轮提供液压的液压模块,以及控制单元。主制动器120的配置是众所周知的,并且在此将不再赘述。主制动器120响应于在主制动器120的任一组件(如液压泵、电机,以及控制单元)发生的异常,以通过信号总线140将故障信号传输至辅助制动器130。
28.即使当主制动器120确定液压泵、电机、液压模块和控制单元中没有异常时,当主制动器120未能实现等于或大于预设值的车辆减速度时,其也进行自我监测,以通过信号总线140将故障信号传输到辅助制动器130。例如,当车辆减速时,具有正常性能的主制动器120会产生大于6.5m/s2的减速度(约为重力加速度的0.65倍)。当主制动器120不能产生大于6.5m/s2的减速度时,辅助制动器130需要快速实施以作为主制动器120的备用。
29.即使在确定液压泵、电机、液压模块和控制单元没有异常之后,当主制动器120类似地将故障信号传递到辅助制动器130时,主制动器120仍可以检测到abs和esc功能的可能缺陷。
30.辅助制动器130被设置为在主制动器120发生故障时代替主制动器120进行操作。辅助制动器130可以如图1所示平行布置,但不限于该布置,它也可以与主制动器120串联布置。
31.辅助制动器130不限于如图1所示的与主制动器120共用第二流动路径170的方法,并且它可以具有除主制动器120之外布置的单独的制动机构。例如,辅助制动器130可以用独立于第二流动路径170布置的单独的流动路径向各个车轮180提供制动力。
32.辅助制动器130可具有与主制动器120相当的功能和性能。辅助制动器130可以具有用于在紧急情况(如不能操作主制动器120)下维持安全性的最小功能,例如,通过仅在前轮180a上产生液压以控制仅对前轮180a实施制动的功能。替代地,辅助制动器130可以具有不仅控制车辆的前轮180a而且还控制车辆的后轮180b的功能。
33.当发生故障时,主制动器120主要使用信号总线140将信号传输到辅助制动器130。当主制动器120的任何一个组件在车辆驾驶或制动时发生故障时,主制动器120将第二信号传输到辅助制动器130。总而言之,当主制动器120正常操作时,它将第一信号传输到辅助制动器130,而当主制动器120发生故障时,它将第二信号传输到辅助制动器130。使用这些信号,辅助制动器130可以连续监控主制动器120的状态。
34.当辅助制动器130通过信号总线140检测到主制动器120的故障状态时,辅助制动
器130做出准备,以在其接收从主制动器120转移来的对制动系统的控制之前向各个车轮180提供制动力。例如,该准备可以包括通过辅助制动器130预先产生液压。
35.一旦辅助制动器130通过通信单元150接收到指示主制动器120的故障原因的操作状态信息,主制动器120的制动系统控制权就被转移到辅助制动器130。在转移了控制权的情况下,辅助制动器130用于代替主制动器120向各个车轮提供制动力。换言之,辅助制动器130控制车辆的制动系统。
36.图2为根据本公开的至少一个实施例的制动系统在正常操作时的框图。图3为根据本公开的至少一个实施例的主制动器发生故障时制动系统的框图。
37.如图2所示,一旦由驾驶员或自动驾驶信号产生制动输入200,制动输入200就被传递到主制动器120或辅助制动器130。响应于制动输入200,主制动器120或辅助制动器130通过向各个车轮提供制动力来控制各个车轮。通常,主制动器120在不发生异常的情况下专门接收制动输入200。
38.主制动器120响应于主制动器120在主制动系统120的下述任一组件处的异常将故障信号传输到辅助制动器130:电机211、电机电流传感器(motor current sensor,mcp)212、电机位置传感器(motor position sensor,mps)213、阀继电器214、液压回路215、电源电压216和主控制器单元(main controller unit,mcu)217。
39.特别地,通过进一步确定是否存在车轮滑移传感器(wheel slip sensor,wss)的故障来确定主制动器120是否已失去如abs和esc等安全驾驶功能。
40.电源电压216可以遇到如关闭或低电压状态之类的异常。当电源电压216关闭时,第二信号会自动传输到辅助制动器130,并且在低电压的情况下,mcu 217会检测到该低电压,并类似地将第二信号传输到辅助制动器130。
41.确定故障的方法包括:当超过预设阈值时确定信号基数(signal base),确定在预定时间或更长时间内没有从传感器接收到信号,和/或比较若干个信号值以查明单独出现在任何一个信号中的异常值,从而确定故障状态。
42.辅助制动器130在通过信号总线140接收到指示主制动器120故障的故障发生信号后开始准备。在辅助制动器130实施准备的同时,制动输入200被阻止传输到辅助制动器130。
43.参见图3,仅在辅助制动器130通过通信单元150接收到指示主制动器120故障原因的操作状态信息并且主制动器120的制动系统控制权转移到辅助制动器130之后,制动输入200才被传递到辅助制动器130。
44.以这种方式,根据本公开的至少一个实施例的车辆制动系统通过使用具有比通信单元150更高的传输速度的信号总线140来提前或加快辅助制动器130的备用准备时间。该备用功能的这种改进有助于驾驶员以高速行驶时更安全地驾驶车辆,特别是具有增加自动车辆的稳定性的效果。
45.图4为根据本公开的至少一个实施例的一种制动系统的控制方法的流程图。
46.如图4所示,制动系统的控制方法可大致包括六个处理步骤。
47.第一步,确定在主制动器120的某些组件上是否发生故障(s410)。主制动器120通过确定在主制动器120的某些部件上已发生异常时,主制动器120未能表现出相当于高于预设值的减速速率的制动能力时,或者主制动器120已失去其功能到无法实施abs和esc功能
的程度时,从而确定在主制动器120上发生的故障。当主制动器120中没有发生故障时,冗余控制终止。
48.当主制动器120确定其发生故障时,它利用数字信号将发生的故障通知给辅助制动器130(s420)。数字信号由高和低两个信号组成,例如,响应于主制动器120故障的发生,其中的低信号被传输到辅助制动器130。在单独使用数字信号的情况下,辅助制动器130仅识别主制动器120是否已发生故障,而不知道主制动器120上故障的确切原因。
49.辅助制动器130实施为各个车轮提供制动力的准备(s430)。辅助制动器130通过通信单元150接收到故障原因并开始产生车轮液压的时间通常是在主制动器120发生故障之后的20ms。然而,辅助制动器130通过直接连线在主制动器120和辅助制动器130之间的信号总线140在1ms内的短时间内接收到故障信号,这允许辅助制动器130比以往更快地进行准备。
50.主制动器120通过通信单元150向辅助制动器130传输包含操作状态信息(其指示主制动器120上的故障原因)的信号(s440)。基于通过通信单元150传输的操作状态信息,辅助制动器130确定主制动器120在主制动器120发生异常的情况下是否能够表现出正常制动功能(s450)。在确定主制动器120没有失去制动功能时,辅助制动器130取消准备并结束控制(s451)。
51.在确定主制动器120已经失去制动功能时,辅助制动器130接收从主制动器120转移的对提供制动力的控制(s460)。换言之,辅助制动器130控制制动系统。
52.通过这种用于控制车辆的制动系统的方法,辅助制动器130的备用性能被加速以展现出比现有技术更好的备用功能。当本公开的至少一个实施例特别地应用于自动驾驶车辆时,能够通过改进制动冗余度来提高车辆乘员的安全性。
53.如上所述,根据本公开的一些实施例,用于车辆的制动系统及其控制方法使辅助制动器能够利用信号总线在比以往实现的时间更短的时间内检测主制动器的故障,从而确保了车辆的冗余性。
54.尽管出于说明性目的描述了本公开的示例性实施例,但是本领域技术人员将理解,在不脱离所要求保护的发明的思想和范围的情况下,可以进行各种修改、增加和替换。因此,为了简洁和清楚,已经描述了本公开的示例性实施例。本实施例的技术思想的范围不受描述的限制。相应地,普通技术人员会理解,所要求保护的发明的范围不受上述明确描述的实施例的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。