1.本发明涉及图像处理技术领域,尤其涉及一种基于栅格的图片分离方法。
背景技术:
2.伴随着人工智能和大数据技术在实际应用中的发展,智能化教育从互联网终端发起,开始逐渐被人们所熟知,正悄无声息地改变着人们的生活观念和生活方式。智能化教育的背后,离不开庞大的数据做支撑,其中在线教育平台和考试的自动化批阅平台都需要大数据的题库。
3.随着人工智能的广泛应用,智能ocr变的愈发火热。而与ocr相关的图像处理技术领域更是离不开人工智能和传统技术相结合的身影。
4.在当今较为流行的ocr识别方面,如:手写字符的提取涉及到复杂的手印分离技术,而传统的手印分离技术虽然有着很多优势,但也存在诸多弊端,如:分离结果存在其他干扰且不够理想,分离图丢失了原始的手写像素灰度信息等。
5.因此,本发明为了解决传统手印分离技术存在的弊端问题,针对印刷和手写分离不干净的情形,以及二值化导致手写字符信息的丢失情况。提出了一种图像栅格化的处理方式,它可从原图像中完全分离出干净的手写字体字符,且能够保证其灰度值不变的条件下,分离出结果更加可靠性的手写体字符图像。
技术实现要素:
6.本发明要解决的技术问题是,提供一种基于栅格的图片分离方法,提供一种基于栅格的手写字体图像分离方法,旨在使用空白的图像和包含手写字符图像的基础上,利用栅格做进一步处理,最后分离出原始的、干净的手写字,以便识别;且能够保证其灰度值不变的条件下,分离出结果更加可靠性的手写体字符图像。
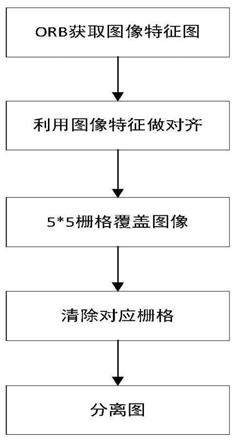
7.为了解决上述技术问题,本发明采用的技术方案是:该基于栅格的图片分离方法,具体包括以下步骤:
8.s1:利用orb算法提取出空白图像和包含手写图像的特征向量;
9.s2:利用图像特征配准所述空白图像和包含手写字的图像,使所述空白图像和包含手写字的图像中打印体的相对位置一致,并获得新图像np;
10.s3:利用n*n(3<n<10)像素的栅格覆盖住所述空白图像,计算每个栅格内部像素的灰度平均值h;取阈值p,当h>p时标记该栅格为待删除状态;
11.s4:获得步骤s3中所有待删除栅格的位置,将步骤s2中新图像np中相同位置的栅格全部涂成白色,从而获得原始的手写体文字。
12.采用上述技术方案,针对印刷和手写分离不干净的情形,以及二值化导致手写字符信息的丢失情况;利用orb算法提取出空白的图像和包含手写字符图像,再利用栅格作进一步处理,最后分离出原始的、干净的手写字,以便识别;可从原图像中完全分离出干净的手写字体字符,且能够保证其灰度值不变的条件下,分离出结果更加可靠性的手写体字符
图像。
13.作为本发明的优选技术方案,所述步骤s1的所述orb算法是基于fast算法与brief算法的算法组合,具体步骤为:
14.s11利用fast算法寻找图像的关键点:设定一个像素点p,将像素点p与多个距离该像素点p的像素为2的像素点相比较,如果至少有一对连续像素点的亮度高于或低于像素点p,则将像素点p选作关键点,从而获取若干对关键点;
15.s12使用brief算法将关键点转换为向特征量:根据步骤s11获取的若干对关键点创建特征向量。
16.作为本发明的优选技术方案,所述步骤s12的具体步骤为:
17.s121:以关键点p为圆心,以d为半径做圆a;
18.s122:在圆a内随机选择n对像素点,
19.s123:设(x,y)是其中的任意一对像素点,x表示像素点1,y表示像素点2;对该对像素点采用公式(1)进行转换,公式(1)为:
[0020][0021]
其中p(x),p(y)分别是像素点x,y的灰度值;
[0022]
s124:重复n次步骤s123,从而获得一个长度为n的向量,该向量即为特征向量。
[0023]
作为本发明的优选技术方案,所述步骤s2的具体步骤为:
[0024]
s21:采用仿射变换矩阵描述手写字的图像中打印体的字迹和空白图像中字迹的偏差;
[0025]
s22:仿射变换矩阵拥有6个自由度:a、b、c、d、e、f,利用下式(2)的形式法作用到某一个点上,公式(2)为:
[0026][0027]
其中(x,y)是旧的坐标点,即为包含手写字的图像上的坐标点;(x’,y’)是新的坐标点即为空白图像的坐标点;要计算出该仿射变换矩阵的6个自由度,至少需要3组对应的坐标点;
[0028]
s23:根据步骤s1中获得两张图像的所有特征向量之后,再计算特征向量之间的汉明距离,如果该距离小于阈值n,那么就认定两张图像上的特征点能配成一对,再使用通用的最小二乘法计算仿射变换矩阵,最小二乘法是一种数学优化技术;通过最小化误差的平方和寻找数据的最佳函数匹配;
[0029]
s24:在得到相应仿射变换矩阵之后,将该矩阵作用到包含手写字的图像就能得到一张消除误差后的新图像np。
[0030]
与现有技术相比,本发明具有的有益效果是:该基于栅格的图片分离方法可从原图像中完全分离出干净的手写字体字符,且能够保证其灰度值不变的条件下,分离出结果
更加可靠性的手写体字符图像。
附图说明
[0031]
下面结合附图进一步描述本发明的技术方案:
[0032]
图1是本发明的基于栅格的图片分离方法的流程图;
[0033]
图2是本发明的基于栅格的图片分离方法的分离后的效果图;
[0034]
图3是采用本发明的基于栅格的图片分离方法对图2进行分离后的效果图。
具体实施方式
[0035]
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
[0036]
实施例:如图1所示,该基于栅格的图片分离方法,具体包括以下步骤:
[0037]
s1:利用orb算法提取出空白图像和包含手写图像的特征向量;
[0038]
所述步骤s1的所述orb算法是基于fast算法与brief算法的算法组合,具体步骤为:
[0039]
s11利用fast算法寻找图像的关键点:设定一个像素点p,将像素点p与多个距离该像素点p的像素为2的像素点相比较,如果至少有一对连续像素点的亮度高于或低于像素点p,则将像素点p选作关键点,从而获取若干对关键点;fast是features from accelerated segments test的简称;
[0040]
s12使用brief算法将关键点转换为向特征量:根据步骤s11获取的若干对关键点创建特征向量;brief是binary robust independent elementary features的简称,它的作用是根据一组关键点创建特征向量;
[0041]
所述步骤s12的具体步骤为:
[0042]
s121:以关键点p为圆心,以d为半径做圆a;
[0043]
s122:在圆a内随机选择n对像素点,
[0044]
s123:设(x,y)是其中的任意一对像素点,x表示像素点1,y表示像素点2;对该对像素点采用公式(1)进行转换,公式(1)为:
[0045][0046]
其中p(x),p(y)分别是像素点x,y的灰度值;
[0047]
s124:重复n次步骤s123,从而获得一个长度为n的向量,该向量即为特征向量;
[0048]
s2:利用图像特征配准所述空白图像和包含手写字的图像,使所述空白图像和包含手写字的图像中打印体的相对位置一致,并获得新图像np;
[0049]
包含手写字的图像中打印体的字迹是和空白图像一模一样的;但是由于扫描/打印的问题,会使打印体的相对位置出现偏差;这种偏差可以是“平移”、“旋转”、“缩放”,“剪切”等等原因或者他们的组合造成的;“配准”就是消除这种偏差,使两种图像中打印体的相对位置一致;数学上可以使用仿射变换矩阵矩阵描述这种偏差;
[0050]
所述步骤s2的具体步骤为:
[0051]
s21:采用仿射变换矩阵描述手写字的图像中打印体的字迹和空白图像中字迹的偏差;
[0052]
s22:仿射变换矩阵拥有6个自由度:a、b、c、d、e、f,利用下式(2)的形式法作用到某一个点上,公式(2)为:
[0053][0054]
其中(x,y)是旧的坐标点,即为包含手写字的图像上的坐标点;(x’,y’)是新的坐标点即为空白图像的坐标点;要计算出该仿射变换矩阵的6个自由度,至少需要3组对应的坐标点;
[0055]
s23:根据步骤s1中获得两张图像的所有特征向量之后,再计算特征向量之间的汉明距离,如果该距离小于阈值n,那么就认定两张图像上的特征点能配成一对,再使用通用的最小二乘法计算仿射变换矩阵,最小二乘法是一种数学优化技术;通过最小化误差的平方和寻找数据的最佳函数匹配;
[0056]
s24:在得到相应仿射变换矩阵之后,将该矩阵作用到包含手写字的图像就能得到一张消除误差后的新图像np;
[0057]
s3:利用n*n(3<n<10)像素的栅格覆盖住所述空白图像,计算每个栅格内部像素的灰度平均值h;取阈值p,当h>p时标记该栅格为待删除状态;此实施例中具体是利用5*5像素的栅格覆盖住所述空白图像,计算每个栅格内部共25个像素的灰度的平均值h;取阈值n,当h>n时标记该栅格为待删除状态;
[0058]
s4:获得步骤s3中所有待删除栅格的位置,将步骤s2中新图像np中相同位置的栅格全部涂成白色,从而获得原始的手写体文字。如图2~图3所示,图2为原包含手写字的图像,图3为采用本发明的基于栅格的图片分离方法对图2进行分离后的效果图。
[0059]
对于本领域的普通技术人员而言,具体实施例只是对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。