1.本发明涉及计算机应用技术领域,尤其涉及一种基于像素概率分布统计的熵最大化涂卡识别方法。
背景技术:
2.随着技术的不断迭代更新,在自动化批阅领域诞生了许多新的技术方法,如某些自动识别方法可以一改过去传统方法的弊端,带来更多的便捷性和最佳的用户体验感,从而得到广泛应用。
3.在答题卡涂卡识别方面,传统的涂卡识别方法存在着较多的局限性,通常需要必备一台特定的扫描阅卡机。由于传统涂卡识别方法是基于涂卡颜料中所含的碳含量做为填涂识别的参考标准,导致对识别场景的要求和填涂的规范都较为苛刻,同时对使用的涂卡纸张也有较高的要求。传统涂卡识别方法不仅受限于纸张的厚度、涂卡铅笔的类型等,甚至需要有固定的答题卡规范设计形式。正是这些必要的条件因素,导致其不便于通用化地使用,对考生的填涂规范也提出了更高的要求。
4.现有技术中关于答题卡的识别是基于规范格式的扫描系统所得到的图像数据,而对于智能手机移动终端而言,其对于答题卡的拍照存在种客观因素的影响,使得不同手机不同环境得到的图像互不相同,给正确识别答题卡内容带来严重干扰,另一方面,答题卡种类多样,格式各不相同现有的识别系统不能灵活根据答题卡的样式选择相对应的识别规则,造成应用上的限制。
技术实现要素:
5.本发明要解决的技术问题是,提供一种基基于像素概率分布统计的熵最大化涂卡识别方法,能够不受限于答题卡的涂卡形式和答题卡的纸张样式,实现达到答题卡涂卡识别的目的,主要用于解决传统方法所带来的不足问题,摆脱更多的条件束缚,有着更加合理且人性化的识别转变。
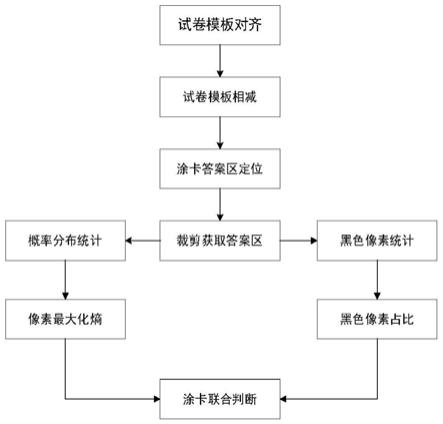
6.为了解决上述技术问题,本发明采用的技术方案是:该基于像素概率分布统计的熵最大化涂卡识别方法,具体包括以下步骤:
7.s1答题卡对齐:将已涂答题卡与空白答题卡对齐;
8.s2试卷模板相减:将读入的空白答题卡和已涂答题卡的数字化矩阵图像保存,分别记作:i0和i1;再对空白答题卡和已涂答题卡的数字化矩阵做减法操作,得到像素差值集合矩阵i
d
,记作:i
d
=i1‑
i0;
9.s3涂卡答案区定位:首先对每个小题的题号进行识别,得到题号字符的坐标;再结合题号次序对题号次序坐标进行排序分析,获得每个小题的横纵分布并记录每个题号所对应的字符的坐标位置,再经过处理和分析后统计获得每道小题对应的填涂答案区的坐标和答案总个数并对答案总个数进行编号;
10.s4裁剪获取答案区:根据步骤s3获得每个小题所对应的填涂答案区坐标,利用填
涂答案区坐标对每个小题分别裁剪获取空白答题卡答案裁剪区域和已涂答题卡答案裁剪区域;
11.s5区域像素灰度统计:根据步骤s2得到的像素差矩阵i
d
,统计不同像素灰度值的分布d(x),再结合像素差矩阵i
d
,获得已填涂且近似黑色像素的概率密度函数f
x
(x);
12.s6图像最大化熵计算:根据步骤s5的概率密度函数f
x
(x)和像素差矩阵i
d
,计算空白答题卡答案裁剪区域和已涂答题卡答案裁剪区域的图像的最大化熵;
13.s7识别结果判断:根据步骤s1~s6完成空白答题卡答案裁剪区域和已涂答题卡答案裁剪区域的图像最大化熵的计算,再计算已填涂且近似黑色像素的占比大小p,再判断获得涂卡结果。
14.采用上述技术方案,首先采用图像定位技术获取空白答题卡和已涂答题卡对应的答案区进行裁剪;接着,将裁剪得到的答案区域图像做像素灰度值的概率分布统计并计算出对应的最大熵;最后,根据对应答案区的关系做答案结果的进行判断,实现答题卡的涂卡识别,该识别方法能够不受限于答题卡的涂卡形式和答题卡的纸张样式,实现达到答题卡涂卡识别的目的,解决了传统方法所带来的不足问题,摆脱更多的条件束缚,有着更加合理且人性化的识别转变。
15.作为本发明的优选技术方案,所述步骤s1答题卡对齐的具体包括以下步骤:
16.s11:选定两张答题卡分别为空白答题卡和已涂答题卡,且空白答题卡和已涂答题卡都存在背景色,空白答题卡背景色为非纯白色;
17.s12:选择从空白答题卡和已涂答题卡的左上角点(0,0)开始,随机裁剪一个固定大小的图像区域,分别得到空白答题卡区域图像和已涂答题卡区域图像,再通过仿射变换算法计算出空白答题卡区域图像的和已涂答题卡区域图像坐标偏移量offset和缩放比例s;其中放射变换算法是通过引入含有平移特性的齐次变换矩阵做s倍缩放,作用于待矫正的图像将其变换至矫正后的图像矩阵以获得矫正的图像,具体变换如公式1
‑
1所示;
[0018][0019]
通过公式的变换矩阵得知,仿射变换的变换矩阵有6个自由度,表示为:(scos(θ),
‑
ssin(θ),t
x
,ssin(θ),scos(θ),t
y
);其中s为缩放倍数即缩放比例;θ为仿射迭代的限定角度;t为平移自由度,t
x
为水平方向的平移自由度,t
y
为垂直方向的平移自由度。
[0020]
s13:将空白答题卡区域图像的坐标偏移量offse和缩放比例s的大小作用至已涂答题卡图像上,使空白答题卡和已涂答题卡达到近似对齐的状态。
[0021]
作为本发明的优选技术方案,所述步骤s3涂卡答案区定位具体步骤为:
[0022]
s31:采用yolo v3目标识别网络对空白答题卡中的题号做识别和检测,它将输入图像分为13x13、26x26、52x52的网格,每个格子负责预测中心在此格子中的题号字符;每个格子预测出3个bounding box,每个bounding box预测内容包括:字符的具体坐标、置信度和所属的类别概率;最终获得每个题号字符的具体坐标,再结合题号次序对题号字符坐标进行上下左右排序分析,得出每个小题的横纵分布情形,并记录所有题号对应的字符的坐标位置;
[0023]
s32:采用目标检测算法和水平投影算法对空白答题卡的图像字符作进一步的处理和分析,用于识别和定位答案的坐标位置;其中水平投影算法目的是对目标识别遗漏的答案做补充,若目标识别丢失了字符b,水平投影根据每个字符在水平方向投影的间隔相等原则,依次排序并分析确认丢失的答案为字符b;
[0024]
s33:根据记录的题号字符的坐标,统计每道小题对应的填涂答案区的答案的总个数,并依次对答案总个数进行编号;其中对答案总个数依次编号为:1,2,3,4,...;对应的结果分别为:a,b,c,d,...。
[0025]
作为本发明的优选技术方案,所述步骤s32中的目标检测算法采用faster rcnn算法或ssd算法。
[0026]
作为本发明的优选技术方案,所述步骤s5具体步骤为:
[0027]
s51:根据步骤s2得到的像素差矩阵i
d
,统计不同像素灰度值的分布,记作:d(x);其中,x为像素灰度值的连续随机变量;
[0028]
s52:根据像素灰度值的分布统计,设定自定义的像素灰度值区域的范围r
i
,记作:r
i
=[v1,v2](v1<v2;v1∈[0,255),v2∈(0,255]);
[0029]
其中,v1和v2均为像素灰度值大小;
[0030]
s53:再根据像素差矩阵i
d
和像素灰度值分布d(x),得到已填涂且近似黑色像素的概率密度函数f
x
(x),记作:
[0031]
作为本发明的优选技术方案,所述步骤s6中的计算公式为1
‑
2所示;
[0032][0033]
其中,x
i
为像素差矩阵i
d
中的随机像素值,n为不大于零的像素值个数。
[0034]
作为本发明的优选技术方案,所述步骤s7中的占比大小的计算公式为1
‑
3所示:
[0035][0036]
其中i
d
是像素差矩阵。
[0037]
作为本发明的优选技术方案,所述步骤s7中判断获得涂卡结果的方法具体为:结合已涂答题卡的规范性要求,自定义符合占比的最大值和最大化熵的设置经验值分别为:70%和70;若不满足此条件,则表示该区域未被填涂,否则为已填涂。
[0038]
与现有技术相比,本发明具有的有益效果是:首先采用图像定位技术获取空白答题卡和已涂答题卡对应的答案区进行裁剪;接着,将裁剪得到的答案区域图像做像素灰度值的概率分布统计并计算出对应的最大熵;最后,根据对应答案区的关系做答案结果的进行判断,实现答题卡的涂卡识别,该识别方法能够不受限于答题卡的涂卡形式和答题卡的纸张样式,实现达到答题卡涂卡识别的目的,解决了传统方法所带来的不足问题,摆脱更多的条件束缚,有着更加合理且人性化的识别转变。
附图说明
[0039]
下面结合附图进一步描述本发明的技术方案:
[0040]
图1是本发明的基于像素概率分布统计的熵最大化涂卡识别方法的流程图;
[0041]
图2是采用本发明的基于像素概率分布统计的熵最大化涂卡识别方法进行识别的效果图。
具体实施方式
[0042]
为了加深对本发明的理解,下面将结合附图和实施例对本发明做进一步详细描述,该实施例仅用于解释本发明,并不对本发明的保护范围构成限定。
[0043]
实施例:如图1所示,该基于像素概率分布统计的熵最大化涂卡识别方法,具体包括以下步骤:
[0044]
s1答题卡对齐:将已涂答题卡与空白答题卡对齐;
[0045]
所述步骤s1答题卡对齐的具体包括以下步骤:
[0046]
s11:选定两张答题卡分别为空白答题卡和已涂答题卡,且空白答题卡和已涂答题卡都存在背景色,空白答题卡背景色为非纯白色;
[0047]
s12:选择从空白答题卡和已涂答题卡的左上角点(0,0)开始,随机裁剪一个固定大小的图像区域,分别得到空白答题卡区域图像和已涂答题卡区域图像,再通过仿射变换算法计算出空白答题卡区域图像的和已涂答题卡区域图像坐标偏移量offset和缩放比例s;放射变换算法是通过引入含有平移特性的齐次变换矩阵做s倍缩放,作用于待矫正的图像将其变换至矫正后的图像矩阵以获得矫正的图像,具体变换如公式1
‑
1所示:
[0048][0049]
通过公式的变换矩阵得知,仿射变换的变换矩阵有6个自由度,表示为:(scos(θ),
‑
ssin(θ),t
x
,ssin(θ),scos(θ),t
y
);其中s为缩放倍数即缩放比例;θ为仿射迭代的限定角度;t为平移自由度,t
x
为水平方向的平移自由度,t
y
为垂直方向的平移自由度;
[0050]
s13:将空白答题卡区域图像的坐标偏移量offse和缩放比例s的大小作用至已涂答题卡图像上,使空白答题卡和已涂答题卡达到近似对齐的状态;
[0051]
s2试卷模板相减:将读入的空白答题卡和已涂答题卡的数字化矩阵图像保存,分别记作:i0和i1;再对空白答题卡和已涂答题卡的数字化矩阵做减法操作,得到像素差值集合矩阵i
d
,记作:i
d
=i1‑
i0;
[0052]
s3涂卡答案区定位:首先对每个小题的题号进行识别,得到题号字符的坐标;再结合题号次序对题号次序坐标进行排序分析,获得每个小题的横纵分布并记录每个题号所对应的字符的坐标位置,再经过处理和分析后统计获得每道小题对应的填涂答案区的坐标和答案总个数并对答案总个数进行编号;
[0053]
所述步骤s3涂卡答案区定位具体步骤为:
[0054]
s31:采用yolo v3目标识别网络对空白答题卡中的题号做识别和检测,它将输入图像分为13x13、26x26、52x52的网格,每个格子负责预测中心在此格子中的题号字符;每个
格子预测出3个bounding box,每个bounding box预测内容包括:字符的具体坐标、置信度和所属的类别概率;最终获得每个题号字符的具体坐标,再结合题号次序对题号字符坐标进行上下左右排序分析,得出每个小题的横纵分布情形,并记录所有题号对应的字符的坐标位置;
[0055]
s32:采用目标检测算法和水平投影算法对空白答题卡的图像字符作进一步的处理和分析,用于识别和定位答案的坐标位置;其中水平投影算法目的是对目标识别遗漏的答案做补充,若目标识别丢失了字符b,水平投影根据每个字符在水平方向投影的间隔相等原则,依次排序并分析确认丢失的答案为字符b;其中目标检测算法采用faster rcnn算法或ssd算法;
[0056]
s33:根据记录的题号字符的坐标,统计每道小题对应的填涂答案区的答案的总个数,并依次对答案总个数进行编号;其中对答案总个数依次编号为:1,2,3,4,...;对应的结果分别为:a,b,c,d,...;
[0057]
s4裁剪获取答案区:根据步骤s3获得每个小题所对应的填涂答案区坐标,利用填涂答案区坐标对每个小题分别裁剪获取空白答题卡答案裁剪区域和已涂答题卡答案裁剪区域;
[0058]
s5区域像素灰度统计:根据步骤s2得到的像素差矩阵i
d
,统计不同像素灰度值的分布d(x),再结合像素差矩阵i
d
,获得已填涂且近似黑色像素的概率密度函数f
x
(x);
[0059]
所述步骤s5的具体步骤为:
[0060]
s51:根据步骤s2得到的像素差矩阵i
d
,统计不同像素灰度值的分布,记作:d(x);其中,x为像素灰度值的连续随机变量;
[0061]
s52:根据像素灰度值的分布统计,设定自定义的像素灰度值区域的范围r
i
,记作:r
i
=[v1,v2](v1<v2;v1∈[0,255),v2∈(0,255]);
[0062]
其中,v1和v2均为像素灰度值大小;
[0063]
s53:根据像素差矩阵i
d
和像素灰度值分布d(x),得到已填涂且近似黑色像素的概率密度函数f
x
(x),记作:
[0064]
s6图像最大化熵计算:根据步骤s5的概率密度函数f
x
(x)和像素差矩阵i
d
,计算空白答题卡答案裁剪区域和已涂答题卡答案裁剪区域的图像的最大化熵;
[0065]
所述步骤s6中的计算公式为1
‑
2所示;
[0066][0067]
其中,x
i
为像素差矩阵i
d
中的随机像素值,n为不大于零的像素值个数;
[0068]
s7识别结果判断:根据步骤s1~s6完成空白答题卡答案裁剪区域和已涂答题卡答案裁剪区域的图像最大化熵的计算,再计算已填涂且近似黑色像素的占比大小p,再结合已涂答题卡的规范性要求,自定义符合占比的最大值和最大化熵的设置经验值分别为:70%和70;若不满足此条件,则表示该区域未被填涂,否则为已填涂,从而获得涂卡结果,如图2所示。
[0069]
所述步骤s7中的占比大小的计算公式为1
‑
3所示:
[0070][0071]
其中i
d
是像素差矩阵。
[0072]
对于本领域的普通技术人员而言,具体实施例只是对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。