1.本发明涉及风力发电机对中装置及调节方法,具体涉及一种增速箱高速轴与发电机轴对中监测调节装置及调节方法。
背景技术:
2.上世纪出现的石油危机,使全球意识到寻常能源的不可持续性,而把目光聚焦于可持续的风能。风力发电机提取风能的媒介是风电机组叶片,叶片经过风的吹动,进而带动风轮转动,经过风电机组增速箱进行旋转速度提升,最终将机械能转换为电能。发电机和增速箱作为风力发电机系统的关键结构,发电机主轴与增速箱高速轴之间的对中状态对风力发电机稳定运行尤为重要。为保证发电机主轴与增速箱高速轴良好对中状态,每年风电场对风力发电机的维护投入了大量人力物力。中国专利201520207758.2公开了一种兆瓦级风力发电机组主轴与齿轮箱对中装置,利用齿轮箱支撑平台和主轴支撑平台对发电机和增速箱进行调节,齿轮箱支撑平台利用的液压缸只可对齿轮箱支撑平台进行升降调节,主轴支撑平台利用液压缸只可对主轴支撑平台进行主轴轴线方向的调节,其他自由度的调节要求操作人员进行手动调节。此专利在调节发电机和齿轮箱时需将风力发电机组停机,利用相关的对中装置进行监测后才可调节,调节装置复杂,调节过程繁琐。中国专利201410401651.1公开了一种用于增速箱与发电机之间的自动对中调节装置及其对中方法的中国专利,利用分别设置在增速箱高速轴和发电机主轴的光栅传感器和激光发射器对增速箱高速轴与风电机主轴对中状态进行监测,利用设置在发电机底部的四个液压缸对发电机进行调节。此专利对发电机的升降、俯仰、横滚等自由度调节比较容易,但难以调节发电机横移、转艏等自由度。
技术实现要素:
3.发明目的:本发明的目的是提供一种增速箱高速轴与发电机轴对中监测调节装置,解决现不能实时监测调节的问题。
4.本发明的另一目的是提供一种增速箱高速轴与发电机轴对中监测调节装置的调节方法,解决现有调节方法难以调节发电机横移、转艏自由度的问题。
5.技术方案:本发明所述的一种增速箱高速轴与发电机轴对中监测调节装置,包括安装在增速箱高速轴、刹车盘、联轴器和发电机主轴的四个监测机构和发电机调节机构,所述发电机调节机构包括设置在发电机底部左右两侧的两个调节部件,每个调节部件包括框架,所述框架内设置有由水平液压缸驱动的滑块,所述滑块上设置有驱动发电机升降的垂直液压缸,根据四个监测机构测定的四个位置的基准轴心位置和实时轴心位置的差值控制水平液压水平液压缸和垂直液压缸动作完成对中调节。
6.所述四个监测机构均包括三个呈品字型分布的测距传感器。
7.所述两个调节部件通过连杆连接,每个调节部件的滑块上均设置有前后两个垂直液压缸。
8.所述发电机底座通过螺栓与垂直液压缸的法兰固定连接,垂直液压缸与滑块通过螺栓连接。
9.为了调节过程中减小摩擦力,所述滑块通过连杆和滚轮与框架滚动接触。
10.为采集到液压缸行程数据,所述垂直液压缸底部设置有检测垂直液压缸行程的拉伸传感器。
11.本发明所述的增速箱高速轴与发电机轴对中监测调节装置的调节方法,包括以下步骤:
12.(1)在发电机主轴与增速箱高速轴对中安装完成后,四个监测装置中的各个测距传感器采集初始数据,根据采集的测距传感器初始数据计算出四个监测点的轴心位置坐标;
13.(3)四个监测机构的测距传感器采集实时数据,根据采集的实时数据计算出四个监测点实时的轴心位置坐标;
14.(4)根据四个监测点的实时轴心位置坐标和初始位置坐标计算轴心偏移数据;
15.(5)根据轴心偏移数据,判断对中状态,确定水平液压缸和垂直液压缸的调节行程,水平液压缸和垂直液压缸根据调节行程进行对中调节。
16.其中,所述步骤(5)中具体为:
17.若δy
a
=δy
b
且δy
c
=δy
d
,则调节两个液压缸水平液压缸行程变化t1=δy
a
‑
δy
c
;
18.若δz
a
=δz
b
且δz
c
=δz
d
,则调节四个垂直液压缸行程变化t2=δz
a
‑
δz
c
;
19.若δy
a
≠δy
b
且符号相反,则左侧调节部件的水平液压缸行程变化t3=(a
‑
l1 b c d)
·
tanθ1,右侧调节部件的水平液压缸行程变化t4=(a
‑
l1 b c d e)
·
tanθ1,其中l1为旋转中心与监测点a之间的水平距离,θ1为旋转角度;
20.若δy
a
与δy
b
符号相同且δy
a
<δy
b
,则左侧调节部件的调节水平液压缸行程变化t5=(a l2 b c d)tanθ2,右侧调节部件的水平液压缸行程变化t6=(a l2 b c d e)tanθ2,其中l2为旋转中心与监测点a之间的水平距离,θ2为旋转角度;
21.若δy
a
与δy
b
符号相同且δy
a
>δy
b
,则左侧调节部件的调节水平液压缸行程变化t5′
=(b
‑
l2′
c d)tanθ2′
,右侧调节部件的水平液压缸行程变化t6′
=(b
‑
l2′
c d e)tanθ2′
其中l2′
为旋转中心与监测点b之间的水平距离,θ2′
为旋转角度;
22.若δy
c
≠δy
d
且δy
c
与δy
d
符号相反,则左侧调节部件的调节水平液压缸行程变化t7=(c
‑
l3 d)tanθ3,右侧调节部件的水平液压缸行程变化t8=(c
‑
l3 d e)
·
tanθ3,其中l3为旋转中心与监测点c之间的水平距离,θ3为旋转角度;
23.若δy
c
与δy
d
符号相同且δy
c
<δy
d
,则左侧调节部件的调节水平液压缸行程变化t9=(d c l4)tanθ4,右侧调节部件的水平液压缸行程变化t
10
=(c d e l4)tanθ4,其中l4为旋转中心与监测点c之间的水平距离,θ4为旋转角度;
24.若δy
c
与δy
d
符号相同且δy
c
>δy
d
,则左侧调节部件的调节水平液压缸i16长度变化t9′
=(d
‑
l4′
)tanθ4′
,调节水平液压缸ii 19长度变化t
10
′
=(d e
‑
l4′
)tanθ4′
,其中l4′
为旋转中心与监测点d之间的水平距离,θ4′
为旋转角度。
25.若δz
a
≠δz
b
且δz
a
与δy
b
符号相反,则左侧调节部件的两个垂直液压缸行程变化t
11
=(a
‑
l5 b c d)
·
tanθ5,右侧调节部件的两个垂直液压缸行程变化t
12
=(a
‑
l5 b c d
e)
·
tanθ5,其中l5为旋转中心与监测点a之间的水平距离,θ5为旋转角度;
26.若δz
a
与δz
b
符号相同且δz
a
<δz
b
,则左侧调节部件的两个垂直液压缸行程变化t
13
=(l6 a b c d)
·
tanθ6,右侧调节部件的两个垂直液压缸行程变化t
14
=(l6 a b c d e)
·
tanθ6,其中l6为旋转中心与监测点b之间的水平距离,θ6为旋转角度;
27.若δz
a
与δz
b
符号相同且δz
a
>δz
b
,则左侧调节部件的两个垂直液压缸行程变化t
13
′
=(b
‑
l6′
c d)
·
tanθ6′
右侧调节部件的两个垂直液压缸行程变化t
14
′
=(b
‑
l6′
c d e)
·
tanθ6′
,其中l6′
为旋转中心与监测点b之间的水平距离,θ6′
为旋转角度;
28.若δz
c
≠δz
d
且δz
c
与δz
d
符号相反,则左侧调节部件的两个垂直液压缸行程变化t
15
=(c
‑
l7 d)tanθ7,右侧调节部件的两个垂直液压缸行程变化t
16
=(c
‑
l7 d e)
·
tanθ7,其中l7为旋转中心与监测点c之间的水平距离,θ7为旋转角度;
29.若δz
c
与δz
d
符号相同且δz
c
<δz
d
,则左侧调节部件的两个垂直液压缸行程变化t
17
=(l8 c d)tanθ8,右侧调节部件的两个垂直液压缸行程变化t
18
=(l8 c d e)tanθ8,其中l8为旋转中心与监测点c之间的水平距离,θ8为旋转角度;
30.若δz
c
与δz
d
符号相同且δz
c
>δz
d
,则左侧调节部件的两个垂直液压缸行程变化t
17
′
=(d
‑
l8′
)tanθ8′
,右侧调节部件的两个垂直液压缸行程变化t
18
′
=(d
‑
l8′
e)tanθ8′
,其中l8′
为旋转中心与监测点d之间的水平距离,θ8′
为旋转角度;
31.若δy
a
=δy
b
且δz
a
=δz
b
,则调节左侧调节部件中的一个垂直液压缸和对应的右侧调节部件中的一个垂直液压缸行程变化t
19
=i
·
sinθ9,其中θ9为旋转角度;
32.若δy
c
=δy
d
且δz
c
=δz
d
,则调节左侧调节部件中的一个垂直液压缸和对应的右侧调节部件中的一个垂直液压缸行程变化t
20
=δz
c
;
33.其中,δy
a
、δy
b
、δy
c
、δy
d
、δz
a
、δz
b
、δz
c
、δz
d
分别为增速箱高速轴、刹车盘、联轴器和发电机主轴四个监测点y轴轴向、z轴轴向偏移数值,为增速箱高速轴和刹车盘监测机构之间的距离,b为刹车盘、联轴器测机构之间的距离,c为联轴器和发电机主轴监测机构之间的距离,d为发电机主轴监测机构与左侧调节部件垂直液压缸之间的距离,e为左右两个调节部件垂直液压缸之间的距离,增速箱高速轴轴心与增速箱左右两侧底座之间的距离均为g,发电机两侧底座之间距离为i,均为g,发电机两侧底座之间距离为i,均为g,发电机两侧底座之间距离为i,均为g,发电机两侧底座之间距离为i,均为g,发电机两侧底座之间距离为i,均为g,发电机两侧底座之间距离为i,
34.有益效果:本发明能够在不停机的条件下,实时监测发电机主轴与增速箱高速轴对中状态,并根据监测结果,对发电机的升降、俯仰、横滚、横移、转艏等五个自由度进行调
节,最终实现发电机主轴与增速箱高速轴的对中修正,利用监控计算机和拉绳传感器对液压缸行程闭环控制,可对液压缸行程精确控制,对发电机位姿调节准确,设置的监测机构可对增速箱和发电机分别进行对中监测,监控计算机可判断出增速箱和发电机是否单独出现偏移或均发生偏移。
附图说明
35.图1为本发明整体结构示意图;
36.图2为各监测机构结构示意图;
37.图3为调节部件结构示意图;
38.图4为图1中a
‑
a局部剖视图;
39.图5为图3中b
‑
b局部剖视图;
40.图6为本发明基准坐标系示意图;
41.图7为监测机构监测轴心方式示意图;
42.图8为xy平面平行不对中示意图;
43.图9为xz平面平行不对中示意图;
44.图10为xy平面增速箱角度不对中示意图;
45.图11为xy平面发电机角度不对中示意图;
46.图12为xz平面增速箱角度不对中示意图;
47.图13为xz平面发电机角度不对中示意图;
48.图14为yz平面增速箱角度不对中示意图;
49.图15为yz平面发电机角度不对中示意图;
50.图16为风力发电机轴对中监测及调节系统液压简图;
51.图17为本发明调节方法流程图。
具体实施方式
52.下面结合附图对本发明进行进一步说明。
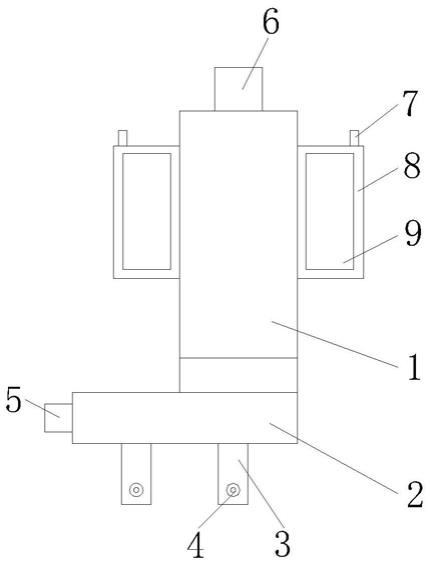
53.如图1所示,本发明专利一种增速箱高速轴与发电机轴对中监测调节装置,主要由增速箱1、监测机构i 2、增速箱高速轴3、刹车盘4、监测机构ii 5、联轴器6、监控计算机7、监测机构iii 8、发电机主轴9、监测机构iv 10、液压站组件11、调节机构i 12、发电机13和调节机构ii 14等部分构成。调节机构i12、调节机构ii 14、液压站组件11构成调节装置,调节装置底面安装在发电机基座上,调节装置上端支撑发电机13。监测机构i2、监测机构ii5、监测机构iii 8、监测机构iv 10构成监测装置,监测装置监测增速箱高速轴3、刹车盘4、发电机主轴9轴线位置对中状态。对中监测装置将监测的数据发送至监控计算机7,监控计算机7进行数据处理及解算判断轴对中状态,当不对中数值超过安全阈值时,监控计算机7控制调节装置进行对中调节。
54.如图2(a)所示,监测装置由监测机构i 2、监测机构ii 5、监测机构iii 8、监测机构iv 10构成。监测装置监测机构i 2安装在增速箱1高速轴a点处,监测机构ii 5安装在刹车盘4的b点处,监测机构iii 8安装在联轴器6的c点处,监测机构iv 10安装在发电机主轴9的d点处;如图2(b)所示,监测机构i 2设置的三个测距传感器呈品字型分布,监测机构i 2
左侧为测距传感器i 29、上方为测距传感器ii 30、右侧为测距传感器iii 31,监测机构ii 5左侧为测距传感器iv 32、上方为测距传感器v 33、右侧为测距传感器vi 34,监测机构iii 8左侧为测距传感器vii 35、上方为测距传感器viii 36、右侧为测距传感器ix 37,监测机构iv 10左侧为测距传感器x 38、上方为测距传感器xi 39、右侧为测距传感器xii 40。
55.如图3所示,调节装置由调节结构i 12、调节机构ii 14、液压站组件11等组成。调节机构i12由垂直液压缸i 17、垂直液压缸ii 15、水平液压缸i 16等组成,调节机构ii 14由垂直液压缸iii 20、垂直液压缸iv 18、水平液压缸ii 19等组成。调节结构i 12与调节机构ii 14通过连杆21进行连接,连杆21通过螺栓分别与调节结构i 12、调节机构ii 14固定连接。
56.如图4
‑
5所示,调节机构i 12由上盖22、底座23、滑块24、连杆25、轴承26、拉绳传感器27、垂直液压缸ii 15、水平液压缸i 16等部分组成。其中,发电机14底座通过螺栓与垂直液压缸ii 15法兰进行固定连接,垂直液压缸ii 15与滑块24通过螺栓连接,垂直液压缸ii 15与法兰通过球接触,水平液压缸i16通过螺栓与底座23连接,上盖22与底座23通过螺栓进行连接,连杆25通过轴承26与滑块24连接,连杆25通过滑轮28与底座23形成滚动接触。拉绳传感器27安装在垂直液压缸ii 15底部法兰并与顶部法兰连接。
57.建立如图6所示坐标系,以发电机13底面作为坐标系xy平面,以发电机13前端面作为yz平面,以穿过发电机13主轴轴线且与xy平面垂直的面作为xz平面。
58.如图7所示,以三个品字形布局的测距传感器对轴心进行监测,监测机构i 2测距传感器i 29、测距传感器ii 30、测距传感器iii 31监测获得目标点数据(y1,z1)、(y2,z2),(y3,z3),监测机构ii 5测距传感器i 32、测距传感器ii 33测距传感器iii 34监测获得目标点数据(y7,z7)、(y8,z8)、(y9,z9),监测机构iii 8测距传感器i 35、测距传感器ii 36测距传感器iii 37监测获得目标点数据(y7,z7)、(y8,z8)、(y9,z9),监测机构iv 10测距传感器i 38、测距传感器ii 39、测距传感器iii 40监测获得目标点数据(y
10
,z
10
)、(y
11
,z
11
)、(y
12
,z
12
),监控计算机计算得出a、b、c、d四点轴心位置,则轴心坐标:
[0059][0060][0061]
[0062][0063]
如图8所示xy平面内,发电机组运行过程中会出现的y轴向平行不对中情况。监测机构i 2和监测机构ii 5可以获得增速箱高速轴实时轴心数据(y
a
′
,z
a
)、(y
b
′
,z
b
)可计算出增速箱偏移值为δy
a
=y
a
′‑
y
a
,δy
b
=y
b
′‑
y
b
,δy
a
=δy
b
,监测机构iii 8和监测机构iv 10可以获得发电机实时轴心数据(y
c
′
,z
c
)、(y
d
′
,z
d
)可计算出发电机偏移值为δy
c
=y
c
′‑
y
c
,δy
d
=y
d
′‑
y
d
,δy
c
=δy
d
,则调节装置需调节水平液压缸i16、水平液压缸ii 19长度变化t1=δy
a
‑
δy
c
以使轴对中状态良好。
[0064]
如图9所示的xz平面内,发电机组运行过程中会出现的z轴向平行不对中情况。监测机构i 2和监测机构ii 5可以获得增速箱高速轴实时轴心数据(y
a
,z
a
′
)、(y
b
,z
b
′
)可计算出增速箱偏移值为δz
a
=z
a
′‑
z
a
,δz
b
=z
b
′‑
z
b
,δz
a
=δz
b
,监测机构iii 8和监测机构iv 10可以获得发电机实时轴心数据(y
c
,z
c
′
)、(y
d
,z
d
′
)可计算出发电机偏移值为δz
c
=z
c
′‑
z
c
,δz
d
=z
d
′‑
z
d
,δz
c
=δz
d
,则调节装置需调节水平液压缸i 16、水平液压缸ii 19长度变化t2=δz
a
‑
δz
c
以使轴对中状态良好。
[0065]
如图1所示,根据实际监测装置安装情况,可以测得监测机构i 2、监测机构ii 5之间距离为a,监测机构ii 5、监测机构iii 8之间距离为b,监测机构iii 8、监测机构iv 10之间距离为c,监测机构iv 10与调节装置垂直方向液压缸i17、垂直方向液压缸iii 20连线中点之间距离为d,调节装置垂直方向液压缸i17、垂直方向液压缸iii 20与垂直方向液压缸ii 15、垂直方向液压缸iv 18连线中点之间距离为e。
[0066]
图10表示,由于增速箱发生角度偏移导致角度不对中情况,根据监测机构i 2和监测机构ii 5可以获得实时轴心数据(y
a
″
,z
a
)、(y
b
″
,z
b
),监测点a、b向y轴分别偏移δy
a
=y
a
″‑
y
a
、δy
b
=y
b
″‑
y
b
。
[0067]
如图10(a)所示,若δy
a
≠δy
b
且符号相反,则表示增速箱1在xy平面内旋转中心m1在监测机构i 2、监测机构ii 5之间,可以计算出旋转中心距监测机构i 2距离为旋转角度为由此可以计算出调节装置进行调节时需以距监测机构i 2距离为处为旋转中心旋转调节,即调节水平液压缸i 16长度变化t3=(a
‑
l1 b c d)
·
tanθ1,调节水平液压缸ii 19长度变化t4=(a
‑
l1 b c d e)
·
tanθ1。
[0068]
如图10(b)所示,若δy
a
与δy
b
符号相同且δy
a
<δy
b
,则表示增速箱1在xy平面内旋转中心m2在监测机构i 2左侧,可以计算出旋转中心距离监测机构i 2距离为旋转角度由此可以计算出调节装置进行调节时需以距离监测机构i 2距离为处为中心旋转调节,即调节水平液压缸i 16长度变化t5=(a l2 b c d)tanθ2,调节水平液压缸ii 19长度变化t6=(a l2 b c d e)tanθ2;
[0069]
如图10(c)所示,若δy
a
与δy
b
符号相同且δy
a
>δy
b
,则表示增速箱1在xy平面内旋转中心m2′
在监测机构ii 5右侧,可以计算出旋转中心距离监测机构ii5距离为旋转角度由此可以计算出调节装置进行调节时需以距离监测机构ii 5距离为处为中心旋转调节,即调节水平液压缸i16长度变化t5′
=(b
‑
l2′
c d)tanθ2′
,调节水平液压缸ii 19长度变化t6′
=(b
‑
l2′
c d e)tanθ2′
。
[0070]
图11表示,由于发电机发生角度偏移导致角度不对中情况,根据监测机构iii 8、监测机构iv 10可以获得实时轴心数据(y
c
″
,z
c
)、(y
d
″
,z
d
),如图11所示监测点c、d向y轴分别偏移δy
c
=y
c
″‑
y
c
、δy
d
=y
d
″‑
y
d
。
[0071]
如图11(a)所示,若δy
c
≠δy
d
且δy
c
与δy
d
符号相反,则表示发电机13在xy平面内旋转中心m3在监测机构iii 8、监测机构iv 10之间,可以计算出旋转中心距监测机构iii 8距离为旋转角度由此可以计算出调节装置进行调节时需以距监测机构iii 8距离为为中心处旋转调节,即调节水平液压缸i16长度变化t7=(c
‑
l3 d)tanθ3,调节水平液压缸ii 19长度变化为t8=(c
‑
l3 d e)
·
tanθ3。
[0072]
如图11(b)所示,若δy
c
与δy
d
符号相同且δy
c
<δy
d
,则表示发电机13在xy平面内旋转中心m4在监测机构iii 8左侧,可以计算出旋转中心距监测机构iii 8距离为旋转角度由此可以计算出调节装置进行调节时需以距监测机构iii 8距离为为中心处旋转调节,即调节水平液压缸i16长度变化t9=(d c l4)tanθ4,调节水平液压缸ii 19长度变化t
10
=(c d e l4)tanθ4。
[0073]
如图11(c)所示,若δy
c
与δy
d
符号相同且δy
c
>δy
d
,则表示发电机13在xy平面内旋转中心m4′
在监测机构iv 10右侧,可计算出旋转中心距监测机构iv 10距离为旋转角度由此可以计算出调节装置进行调节时需以距监测机构iv距离为为中心处旋转调节,即调节水平液压缸i 16长度变化t9′
=(d
‑
l4′
)tanθ4′
,调节水平液压缸ii 19长度变化t
10
′
=(d e
‑
l4′
)tanθ4′
。
[0074]
图12所示xz平面内,发电机组运行过程中会出现的角度不对中情况,是由于增速箱1发生角度偏移导致角度不对中情况,根据监测机构i 2和监测机构ii 5可以获得实时轴心数据(y
a
,z
a
″
)、(y
b
,z
b
″
)。如图11所示,监测点a、b向z轴分别偏移δz
a
=z
a
″‑
z
a
、δz
b
=z
b
″‑
z
b
。
[0075]
如图12(a)所示,若δz
a
≠δz
b
且δz
a
与δy
b
符号相反,增速箱1在xz平面内旋转中心m5在监测机构i 2、监测机构ii 5之间,可以计算出旋转中心距监测机构i 2离为旋转角度为由此可以计算出调节装置进行调节时需以
距监测机构i 2离为处为中心旋转调节,即调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
11
=(a
‑
l5 b c d)
·
tanθ5,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
12
=(a
‑
l5 b c d e)
·
tanθ5。
[0076]
如图12(b)所示,若δz
a
与δz
b
符号相同且δz
a
<δz
b
,则表示增速箱1在xz平面内旋转中心m6在监测机构i 2左侧,可以计算出旋转中心距监测机构ii 5距离为旋转角度为由此可以计算出调节装置进行调节时需以距监测机构ii 5距离为处为中心旋转调节,即调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
13
=(l6 a b c d)
·
tanθ6,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
14
=(l6 a b c d e)
·
tanθ6。
[0077]
如图12(c)所示,若δz
a
与δz
b
符号相同且δz
a
>δz
b
,则表示增速箱1在xz平面内旋转中心m6′
在监测机构ii 5右侧,可以计算出旋转中心距监测机构ii 5距离为旋转角度为由此可以计算出调节装置进行调节时需以距监测机构ii 5距离为处为中心旋转调节,即调节垂直液压缸i17、垂直液压缸ii 15长度变化t
13
′
=(b
‑
l6′
c d)
·
tanθ6′
,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
14
′
=(b
‑
l6′
c d e)
·
tanθ6′
。
[0078]
图13所示,xz平面内,由于发电机13发生角度偏移导致角度不对中情况,根据监测机构iii 8、监测机构iv 10获得实时轴心数据(y
c
,z
c
″
)、(y
d
,z
d
″
),如图12所示,监测点c、d向z轴分别偏移δz
c
=z
c
″‑
z
c
、δz
d
=z
d
″‑
z
d
。
[0079]
如图13(a)所示,若δz
c
≠δz
d
且δz
c
与δz
d
符号相反,则表示发电机13在xz平面内旋转中心在监测机构iii 8、监测机构iv 10之间,可以计算出旋转中心距监测机构iii 8距离为旋转角度由此可以计算出调节装置进行调节时需以距监测机构iii 8距离为为中心处旋转调节,即调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
15
=(c
‑
l7 d)tanθ7,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
16
=(c
‑
l7 d e)
·
tanθ7。
[0080]
如图13(b)所示,若δz
c
与δz
d
符号相同且δz
c
<δz
d
,则表示发电机13在xz平面内旋转中心在监测机构iii 8左侧,可以计算出旋转中心距监测机构iii 8距离为旋转角度由此可以计算出调节装置进行调节时需以距监测机构iii 8距离为处为中心旋转调节,即调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
17
=(l8 c d)tanθ8,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
18
=(l8 c d e)tanθ8。
[0081]
如图13(c)所示,若δz
c
与δz
d
符号相同且δz
c
>δz
d
,则表示发电机13在xz平面
内旋转中心在监测机构iv 10右侧,可以计算出旋转中心距监测机构iv 10距离为旋转角度由此可以计算出调节装置进行调节时需以距监测机构iv 10距离为处为中心旋转调节,即调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
17
′
=(d
‑
l8′
)tanθ
g
′
,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
18
′
=(d
‑
l8′
e)tanθ8′
。
[0082]
图14所示yz平面内,由于增速箱发生角度偏移导致角度不对中情况,根据监测机构i 2、监测机构ii 5获得实时轴心数据(y
a
″′
,z
a
″′
)、(y
b
″′
,z
b
″′
),根据实际测量可知增速箱高速轴轴心与增速箱左右两侧底座之间的距离均为g,发电机两侧底座之间距离为i,如图14所示,监测点a、b分别偏移δy
a
=δy
b
=y
a
″′‑
y
a
=y
b
″′‑
y
b
、δz
a
=δz
b
=z
a
″′‑
z
a
=z
b
″′‑
z
b
,其中旋转中心为增速箱1左侧或右侧底座,旋转角度由此可以计算出调节装置进行调节时需以发电机左侧或右侧底座处为中心旋转调节,即调节垂直液压缸i 17、垂直液压缸iii 20或垂直液压缸ii 15、垂直液压缸iv 18长度变化t
19
=i
·
sinθ9。
[0083]
如图15所示yz平面内,是由于发电机发生角度偏移导致角度不对中情况,根据监测机构iii 8、监测机构iv 10获得实时轴心数据(y
c
″′
,z
c
″′
)、(y
d
″′
,z
d
″′
)。如图15所示,监测点c、d分别偏移δy
c
=δy
d
=y
c
″′‑
y
c
=y
d
″′‑
y
d
、δz
c
=δz
d
=z
c
″′‑
z
c
=z
d
″′‑
z
d
,其中旋转中心为发电机13左侧或右侧底座,由此可计算出调节装置进行调节时需以发电机13左侧或右侧底座处为中心旋转调节,即调节垂直液压缸i17、垂直液压缸iii 20或垂直液压缸ii 15、垂直液压缸iv 18长度变化t
20
=δz
c
。
[0084]
如图16所示为液压简图,液压泵41持续泵油至液压缸,溢流阀42可防止液压系统过载,蓄能器43在液压站适当时机进行能量存储当系统需要时将能量释放出来,电液比例换向阀i 44通过控制流量以控制水平液压缸i16行程,电液比例换向阀ii 45通过控制流量以控制垂直液压缸i 17、垂直液压缸ii 15行程,电液比例换向阀iii 46通过控制流量以控制水平液压缸i 19行程,电液比例换向阀iv 47通过控制流量以控制垂直液压缸iii 20、垂直液压缸iv 18行程。
[0085]
如图17所示,本发明的调节方法包括以下步骤:
[0086]
(1)在发电机主轴与增速箱高速轴对中安装完成后,监测装置中的测距传感器采集初始数据(0y1,0z1)、(0y2,0z2)、(0y3,0z3)、(0y4,0z4)、(0y5,0z5)、(0y6,0z6)、(0y7,0z7)、(0y8,0z8)、(0y9,0z9)、(0y
10
,0z
10
)、(0y
11
,0z
11
)、(0y
12
,0z
12
)。
[0087]
(2)根据第一步采集的测距传感器初始数据计算出各监测点的轴心坐标将此作为基准轴心坐标。
[0088]
(3)测距传感器采集实时数据,测距传感器i 29、测距传感器ii 30、测距传感器iii 31监测获得目标点数据(y1,z1)、(y2,z2)、(y3,z3),测距传感器iv 32、测距传感器v 33测距传感器vi 34监测获得目标点数据(y7,z7)、(y8,z8)、(y9,z9);测距传感器vii 35、测距传感器viii 36测距传感器ix 37监测获得目标点数据(y7,z7)、(y8,z8)、(y9,z9);测距传感器x 38、测距传感器xi 39测距传感器xii 40监测获得目标点数据(y
10
,z
10
)、(y
11
,z
11
)、
(y
12
,z
12
)。其中测距传感器i 29、测距传感器ii 30、测距传感器iii 31;测距传感器iv 32、测距传感器v 33测距传感器vi 34;测距传感器vii 35、测距传感器viii 36测距传感器ix 37;测距传感器x 38、测距传感器xi 39测距传感器xii 40监测点分别为增速箱高速轴外圆表面、刹车盘外圆表面、联轴器外圆表面与发电机主轴外圆表面。
[0089]
(4)监控计算解算a、b、c、d四点实时轴心位置,机根据公式
[0090][0091][0092][0093][0094]
获得a、b、c、d四点实时轴心位置(y
a
,z
a
)、(y
b
,z
b
)、(y
c
,z
c
)、(y
d
,z
d
)。
[0095]
(5)计算轴心偏移数据,δy
a
、δy
b
、δy
c
、δy
d
、δz
a
、δz
b
、δz
c
、δz
d
。其中δy
a
、δy
b
、δy
c
、δy
d
、δz
a
、δz
b
、δz
c
、δz
d
分别为a、b、c、d四点y轴轴向、z轴轴向偏移数值。
[0096]
(6)心偏移数据,判断对中状态,调整液压缸行程,具体如下:
[0097]
若δy
a
=δy
b
且δy
c
=δy
d
,则调节液压缸水平液压缸i16、水平液压缸ii 19长度变化t1=δy
a
‑
δy
c
。
[0098]
若δz
a
=δz
b
且δz
c
=δz
d
,则调节装置需调节垂直液压缸i17、垂直液压缸ii 15、垂直液压缸iii 120、垂直液压缸iv18长度变化t2=δz
a
‑
δz
c
。
[0099]
若δy
a
≠δy
b
且符号相反,则调节水平液压缸i 16长度变化t3=(a
‑
l1 b c d)
·
tanθ1、调节水平液压缸ii 19长度变化t4=(a
‑
l1 b c d e)
·
tanθ1,其中l1为旋转中心与监测点a之间的水平距离,θ1为旋转角度。
[0100]
若δy
a
与δy
b
符号相同且δy
a
<δy
b
,则调节水平液压缸i 16长度t5=(a l2 b c d)tanθ2,调节水平液压缸ii 19长度变化t6=(a l2 b c d e)tanθ2,其中l2为旋转中心与监测点a之间的水平距离,θ2为旋转角度。
[0101]
若δy
a
与δy
b
符号相同且δy
a
>δy
b
,则调节水平液压缸i 16长度变化t5′
=(b
‑
l2′
c d)tanθ2′
,调节水平液压缸ii 19长度变化t6′
=(b
‑
l2′
c d e)tanθ2′
,其中l2′
为旋转中心与监测点b之间的水平距离,θ2′
为旋转角度。
[0102]
若δy
c
≠δy
d
且δy
c
与δy
d
符号相反,调节水平液压缸i 16长度变化t7=(c
‑
l3 d)tanθ3,调节水平液压缸ii 19长度变化为t8=(c
‑
l3 d e)
·
tanθ3,其中l3为旋转中心与监测点c之间的水平距离,θ3为旋转角度。
[0103]
若δy
c
与δy
d
符号相同且δy
c
<δy
d
,则调节水平液压缸i 16长度变化t9=(d c l4)tanθ4,调节水平液压缸ii 19长度变化t
10
=(c d e l4)tanθ4,其中l4为旋转中心与监测点c之间的水平距离,θ4为旋转角度。
[0104]
若δy
c
与δy
d
符号相同且δy
c
>δy
d
,则调节水平液压缸i 16长度变化t9′
=(d
‑
l4′
)tanθ4′
,调节装水平液压缸ii 19长度变化t
10
′
=(d e
‑
l4′
)tanθ4′
,其中l4′
为旋转中心与监测点d之间的水平距离,θ4′
为旋转角度。
[0105]
若δz
a
≠δz
b
且δz
a
与δy
b
符号相反,则调节垂直液压缸i17、垂直液压缸ii 15长度变化t
11
=(a
‑
l5 b c d)
·
tanθ5,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
12
=(a
‑
l5 b c d e)
·
tanθ5,其中l5为旋转中心与监测点a之间的水平距离,θ5为旋转角度。
[0106]
若δz
a
与δz
b
符号相同且δz
a
<δz
b
,调节垂直液压缸i17、垂直液压缸ii 15长度变化t
13
=(l6 a b c d)
·
tanθ6,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
14
=(l6 a b c d e)
·
tanθ6,其中l6为旋转中心与监测点b之间的水平距离,θ6为旋转角度。
[0107]
若δz
a
与δz
b
符号相同且δz
a
>δz
b
,则调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
13
′
=(b
‑
l6′
c d)
·
tanθ6′
,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
14
′
=(b
‑
l6′
c d e)
·
tanθ6′
,中l6′
为旋转中心与监测点b之间的水平距离,θ6′
为旋转角度。
[0108]
若δz
c
≠δz
d
且δz
c
与δz
d
符号相反,则调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
15
=(c
‑
l7 d)tanθ7,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化为t
16
=(c
‑
l7 d e)
·
tanθ7,其中l7为旋转中心与监测点c之间的水平距离,θ7为旋转角度。
[0109]
若δz
c
与δz
d
符号相同且δz
c
<δz
d
,则调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
17
=(l8 c d)tanθ8,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
18
=(l8 c d e)tanθ8,其中l8为旋转中心与监测点c之间的水平距离,θ8为旋转角度。
[0110]
若δz
c
与δz
d
符号相同且δz
c
>δz
d
,则调节垂直液压缸i 17、垂直液压缸ii 15长度变化t
17
′
=(d
‑
l8′
)tanθ8′
,调节垂直液压缸iii 20、垂直液压缸iv 18长度变化t
18
′
=(d
‑
l8′
e)tanθ8′
,其中l8′
为旋转中心与监测点d之间的水平距离,θ8′
为旋转角度。
[0111]
若δy
a
=δy
b
且δz
a
=δz
b
,则调节垂直液压缸i 17、垂直液压缸iii 20或垂直液压缸ii 15、垂直液压缸iv 18长度变化t
19
=i
·
sinθ9,其中θ9为旋转角度。
[0112]
若δy
c
=δy
d
且δz
c
=δz
d
,则调节垂直液压缸i 17、垂直液压缸iii 20或垂直液压缸ii 15、垂直液压缸iv 18长度变化t
20
=δz
c
。
[0113]
(7)返回第三步,继续采集数据。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。