1.本发明涉及计算机技术领域,尤其涉及一种针对行驶轨迹的农机行为可视化标注方法。
背景技术:
2.农机行驶轨迹数据是农机作业管理中最基础的数据之一,其是利用全球卫星定位系统得到的农机定位信息(例如,经度、纬度、方向等)。针对农机行驶轨迹可以分析农机的驾驶行为,得到某些行为的相关信息(例如,田间掉头的所费时间)。这对设计农机管理决策服务模型、促进农业机械信息化有极大的推进作用。
3.针对海量行驶轨迹的农机行为分析需要数据挖掘技术,其可以对农机驾驶轨迹进行自动分段并给出每个片段的农机行为。但是,这些农机轨迹挖掘技术往往采用全监督机器学习或深度学习技术进行模型训练,这需要一定量的人工标注数据。目前,农机驾驶行为的人工标注主要依靠现场人工记录。即,在农机行驶过程中,机手本人或辅助人员现场实时记录当前农机的位置信息及驾驶行为。这种现场人工标注方法可以直接利用农机作业场景信息,但是非常费时费力。尤其是在农机处于长时间行驶的状态下,非常容易产生数据错漏或不准确等问题。因此,本发明提出一种非现场的农机驾驶行为人工标注方法,其利用安装在农机上的北斗终端采集农机轨迹数据,通过可视化的ui界面还原农机作业场景及绘制相应的农机驾驶轨迹,进而进行农机行为的人工标注。
技术实现要素:
4.本发明的目的是提出一种针对行驶轨迹的农机行为可视化标注方法,其特征在于,包括以下步骤:
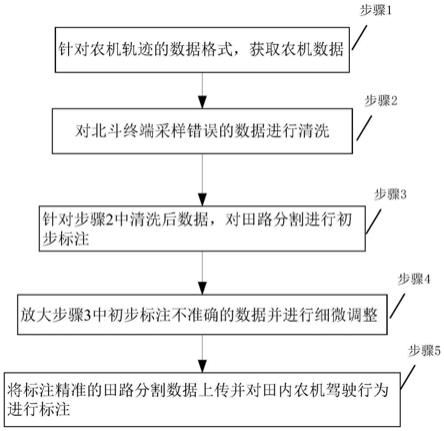
5.步骤1:数据获取;针对农机轨迹的数据格式,获取农机数据;
6.步骤2:数据清洗;对北斗终端采样错误的数据进行清洗;
7.步骤3:田路分割初步标注;针对步骤2中清洗后数据,对田路分割进行初步标注;
8.步骤4:放大步骤3中初步标注不准确的数据并进行细微调整;
9.步骤5:将标注精准的田路分割数据上传并对田内农机驾驶行为进行标注。
10.所述农机数据包括经度、纬度和日期。
11.所述步骤2具体包括以下子步骤:
12.步骤21:清洗掉两点之间时间间隔为0s的点,保留的点为第一个;
13.步骤22:清洗掉经纬度相同,速度为0的点,保留点为第一个;
14.步骤23:清洗掉经纬度相同,速度相同且不为0的连续的点,保留点为第一个;
15.步骤24:清洗掉经纬度不相同,速度为0且连续的点,保留点为第一个;
16.步骤25:直接删除经纬度异常的点;
17.步骤26:对缺失方向角度的农机轨迹数据,根据前后两点之间的经纬度计算其方向夹角,作为前一个点的方向数据。
18.所述步骤3具体包括以下子步骤:
19.步骤31:检查经过整理并清洗过的数据,确定其包含经度、纬度和日期字段;
20.步骤32:上传轨迹数据,将轨迹数据点绘制到谷歌影像地图中,并根据时间先后顺序进行连线;
21.步骤33:针对感兴趣的轨迹数据的范围,在其四周选取多个点形成一个闭合的多边形,此多边形内的轨迹点为初步标注的农田轨迹数据。
22.本发明的有益效果在于:
23.本发明结合北斗终端的可视化农机行为标注方法利用可视化技术最大程度地还原了农机作业场景,从而可以进行离线的农机行为的人工标注,有效地解决了现场人工记录的繁琐和不准确的问题,达到了节时节力的目的。
附图说明
24.图1为本发明针对行驶轨迹的农机行为可视化标注方法的流程图;
25.图2为对农田粗略分割的结果图;
26.图3(a)和图3(b)为对初步田路分割进行微调的结果图;
27.图4为不同的农机驾驶行为分割效果图。
具体实施方式
28.本发明提出一种针对行驶轨迹的农机行为可视化标注方法,下面结合附图和具体实施例对本发明做进一步说明。
29.本发明可以根据输入的农机轨迹数据绘制路径并标注数据,从而区分农机不同的驾驶行为。其工作流程图如图1所示:
30.步骤一,数据获取:
31.本方法首先编写数据爬取程序,针对农机轨迹的数据格式,获取农机数据,最基本的数据要求的字段为经度、纬度、日期。
32.步骤二,数据清洗:
33.在农机驾驶轨迹的采集过程中,北斗终端经常会出现重采样、静止轨迹等采样错误情况,为了避免采样错误对后续分类方法造成影响,事先需要对数据进行相应的清理,数据清理流程为:
34.(1)重采样类型:清理掉两点之间时间间隔为0s的点,保留的点为第一个。
35.(2)静止轨迹类型:清理掉经纬度相同,速度为0的点保留点仍为第一个。
36.(3)重采样类型:清理掉经纬度相同,速度相同且不为0的连续的点,保留点为第一个。
37.(4)静态漂移类型:清理掉经纬度不相同、速度为0且连续的点,保留点为第一个。
38.(5)经纬度异常类型:因数据采集区域为中国的多个省市,故经纬度的范围超出中国的范围时,则此时采集的点为经纬度异常的情况需要进行清理,清理方式为直接进行删除。
39.(6)方向数据缺失类型:因为北斗终端的采集要求不同以及农机数据的获取平台不同,某些农机轨迹数据缺失方向角度数据,故还需根据前后两点之间的经纬度数据计算
其方向夹角,作为前一个点的方向数据。
40.步骤三,田路分割初步标注:
41.检查经过整理并清洗过的数据,确定其是否包含所需要的经纬度以及日期等字段的数据。其次,通过程序上传轨迹数据,将轨迹数据点绘制到谷歌影像地图中,并根据时间先后顺序进行连线。最后,点击开始圈选后,针对自己想要标注的轨迹数据的范围,在其四周点击多个点,围成一个闭合的多边形,多边形内的轨迹点为标注好的农田轨迹数据。本发明可以根据输入的轨迹数据,结合谷歌影像地图展示农机行驶轨迹,并进行初步的粗略分割,将农田所属轨迹和道路所属轨迹分割开来,分割结果如图2所示。
42.步骤四,初步标注数据的微调:
43.通过步骤三的田路分割标注程序可以大致区分出轨迹数据中哪些是农田,哪些是道路,但是因为一份轨迹数据的数据量过大或者一些农机的特殊驾驶行为,例如农机转弯、等待红绿灯等低速度行驶区域会造成轨迹点密度过高的情况,易导致步骤三划定的范围将这些轨迹点密度过高的区域进行标定,往往会使田路分割无法标注得非常准确,这会直接影响后续的数据挖掘效果。因此,在经过步骤三粗略的田路分割标注的数据的基础上,步骤四微调标注程序分别抽取属于田的和属于路的数据部分,并逐图显示,进行细微的调整。首先,程序读取步骤三初步标注的数据,将其中每一副标注为田的轨迹点(标签值为1)读出并显示,相较于步骤三,可以将田内轨迹数据进行放大,易进行标注。类似于上一步,以圈选的方式进行标注,针对自己想要标注的轨迹数据的范围,在其四周点击4个点,形成一个类矩形,矩形内的轨迹点即为修正为道路(标签值为0)的点。单击鼠标滚轮键并按键盘任意键进行保存切换到下一副农田轨迹。
44.在针对因轨迹数据量过大或因农机特殊的驾驶行为而导致的初步田路分割不精确的情况,提取初步的标注数据并采取圈选的方式进行微小调整,确保农田和道路的分割标注尽可能精确,分割结果如图3(a)和图3(b)所示。
45.步骤五,田内农机驾驶行为标注:
46.由于农机的主要作业和活动范围是在农田内,因此,田内的农机驾驶行为具有重大的研究意义,所以需要针对农机田内的驾驶行为进行标注。农机田内驾驶行为大致可以分为:田内作业行为、田内掉头行为以及田内转弯行为。步骤五主要针对田内农机驾驶行为进行标注,以农机田内作业行为和农机田内掉头行为的区分标注为例(农机田内转弯行为的标注与之类似),具体方法为:将步骤四标注的较为精准的田路分割数据上传,程序将此份数据中每一副标注为田的轨迹点(标签值为1)读出并显示,采取点选的方式进行标注,即标注一段轨迹,点击该轨迹段的起止点,则这段轨迹包括起止点在内的轨迹点变色,其数据自动将标签值标注为2,按键盘任意键保存并切换到下一副田内轨迹。
47.针对田内复杂多变的农机驾驶行为,进行田内农机轨迹数据的标注,针对田内农机的三类驾驶行为,采取点选的方式进行标定,将田内不同的农机驾驶行为分割开来,效果如图4所示。
48.此实施例仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。