1.本发明涉及一种具有清洁功能的行走机器人及清洁方法,属于自动化清洁领域。
背景技术:
2.工业生产依据生产规范需要定期管道件进行清理,防止输送液体的沉淀物大量附着于管道内壁,长时间形成堵塞,减小工业管道的流量,同时腐蚀管道内壁,如果采用化学处理,其化学成分较为复杂,部分化学物易与附着物反应与管道内形成新的附作物,而部分已安装管道因其安装位置,或管道长度较长,不便于拆卸,处理内部的附着物较为麻烦,同时管道不是直线运输,管道自身有部分弯折设计部以避开厂区中的障碍物,目前市面大部分机器人均为直线设计,不适用于此类管道的清理。
技术实现要素:
3.本发明为解决上述背景技术中存在的技术问题,提供一种具有清洁功能的行走机器人及清洁方法。
4.本发明采用以下技术方案来实现:一种具有清洁功能的行走机器人及清洁方法,包括:行进模块,包括至少一组动力组件,每个动力组件之间通过连接组件铰接;每组动力组件的外壁交替设有爬行组件和弹性轮组;清洁模块,沿管道的轴向连接于位于边缘处的动力组件,同时沿管道的径向发生自转;使用时,相邻的动力组件之间夹角根据管道的弯折自行发生改变,以适用于各种类型的管道清理。
5.通过上述技术方案,行进组件采用多级动力组件,增大机器人行进时的动力,同时将传统的动力组件进行分割,减少单个动力组件的在其行进向的长度,通过减少机器人行进过程中的线性接触,以适应管道的局部弯折,清洁组件清洁管道内壁,辅助组件支撑清洁组件的清洁工作。
6.在进一步的实施例中,所述动力组件包括:壳体,内部为镂空结构的柱体;所述柱体的横截面为多边形且最大内径大于棱长;气缸组,设于所述壳体的外壁上,至少为两组且以壳体的中心轴线为中心对称分布在壳体的外壁;爬行组件,安装于所述气缸组的伸缩端,所述气缸组控制所述爬行组件抵至并压紧在管道内壁,增大所述爬行组件与管道内壁的摩擦力,使动力组件在管道内行进。
7.通过上述技术方案,通过增大机器人的爬行组件与管道之间的压力来增大摩擦力,即通过气缸组控制爬行组件抵至并压紧在管道内壁,实现机器人的正常行进工作。
8.在进一步的实施例中,所述爬行组件包括:第一安装件,设于所述气缸组的控制端;第一滚轮,设于所述第一安装件上;用以驱动所述爬行组件行进;
万向轮,设于所述第一安装件上:所述万向轮在行进至管道弯折处转向,使所述爬行组件在行进中转向。
9.通过上述技术方案,万向轮设于爬行组件的开始行进方向的前端,用于爬行组件进行转向。
10.在进一步的实施例中,所述弹性轮组包括:旋转台,设于所述壳体的外壁;使所述弹性轮组的其余部件在管道弯折处行进时进行角度偏转,使所述弹性轮组抵至管道内壁;轴承座,设于所述旋转台上;所述轴承座通过第二安装件安装第二滚轮;转动轴,设于所述第二安装件上;相邻的两个所述动力组件上的两个所述转动轴通过弹簧进行连接,所述第二滚轮在所述弹簧的弹力作用下抵至在管道内壁。
11.通过上述技术方案,通过弹性轮组始终紧密接触管道内壁,辅助行进组件稳定行进,而对于管道弯折处的这设有旋转台,控制弹性轮组紧密接触管道内壁。
12.在进一步的实施例中,所述万向轮、所述第二滚轮、所述第一滚轮的轮子外侧均设置防滑钉结构。
13.通过上述技术方案,用于增大机器人在管道行进时的摩擦力,防滑钉结构同时打碎多个轮子在行进轨迹上的附着物,防止附着物进一步附着在管道内壁。
14.在进一步的实施例中,所述连接组件包括:两个轴承,设于两个所述壳体的相邻多边形面的中心处;第一万向轴,两端分别连接于两个所述轴承;在多个所述动力组件先后越过管道时,消除前一个所述动力组件相对后一个所述动力组件在行进方向上产生角度偏差产生卡死的影响,使多个所述动力组件先后越过管道的弯折处。
15.通过上述技术方案,多级动力装置在管道弯折处行进时,前后动力组件的会产生偏转角度,采用万向轴结构来消除两个动力组件在管道弯折处先后行进时产生的径向角度偏差,使行进组件越过管道弯折处。
16.在进一步的实施例中,所述清洁模块包括:传动轴,设于所述壳体的另一多边形面的中心处;第一转轴,一端通过第二万向节连接于所述传动轴;套件,套接于所述第一转轴,所述套件外侧表面设有毛刷,毛刷贴合至管道内壁;辅助组件,通过第三万向节连接于所述第一转轴的另一端;所述第三万向节、所述第二万向节与所述第一转轴组合成万向轴传递所述传动轴的扭矩,使所述第一转轴在管道内旋转,使所述清洁模块进行清洁作业。
17.通过上述技术方案,采用物理模式进行清除,定期通过毛刷对管道内壁进行物理洗刷,使附着物掉料至管道底部,最后用清水冲刷。
18.在进一步的实施例中,所述辅助组件包括:第二转轴,连接于所述第三万向节的另一端;两个第三安装件,平行套设于所述第二转轴上;多个弹性支撑脚,对称设于所述第三安装件上;在管道内滑动,两个所述第三安装件使多个所述弹性支撑脚组合成立体弹性组件,使得所述第一转轴在行进时位置相对固定。
19.通过上述技术方案,在辅助组件越过管道弯折处后,进行回正,而在转向运动过程中,行进过程在产生的偏差,即辅助组件行进时产生角度偏差通过第三万向节消除,利用两端分别连接万向轴的第一转轴可以自由旋转特性,使清洁组件持续清理管道内壁。
20.在进一步的实施例中,在所述辅助组件的末端设有拉环,所述拉环连接绳索用以辅助从管道内取出机器人。
21.通过上述技术方案,对于机器人发生故障时做出一种预防措施,通过绳索拉出故障机器人,在机器人工作完成后,拉出管道内的机器人。
22.在进一步的实施例中,包括以下步骤:步骤一:将行走机器人的行走模块、清洁模块依次放入管道内,弹性轮组自动抵至管道内壁,调节气缸组,使行走模块的爬行组件抵至管道内壁并压紧;步骤二:爬行组件牵引清洁模块沿着管道的行进,清洁模块开始工作,清洁模块中的毛刷不断清理管道内壁的附着物;步骤三:行进至管道弯折处时,单个动力组件的越过管道弯折处,多个动力组件之间的连接组件为万向轴结构,多个动力组件依次越过管道的弯折处,清洁模块与动力组件之间设有第二万向节,动力组件拖动清洁模块部分组件依次越过管道弯折处,在万向轴的结构作用下,电机通过传动轴传递扭矩至清洁模块的第一转轴上,清洁模块中的毛刷持续旋转,辅助组件最后通过管道弯折处,辅助组件沿着管道弯折方向偏折一定角度,越过管道弯折处后,辅助组件弹性回正;步骤四:清理完管道后,控制动力组件的爬行组件不在压紧管道内壁,缓慢拉动绳索,使得机器人退出管道。
23.本发明的有益效果:该具有清洁功能的行走机器人及清洁方法采用多级动力组件行进,减小动力组件自身形状的大小长度,结合爬行组件转向设计,实现在管道内偏转时,动力组件不与管道内壁碰撞,从而越过管道弯折处;同时多级动力组件分担较小的动能,在狭小的管道空间内,使机器人产生较小的热量,保证机器人的稳定运行;清洁组件采用物理的方式,即用毛刷对管道内壁进行清理,既不损害管道内壁,用能较好清除附着物,最后用清水冲刷处附着物即可,定期进行清理,有效延长管道的使用寿命。
附图说明
24.图1是本发明的整体结构示意图。
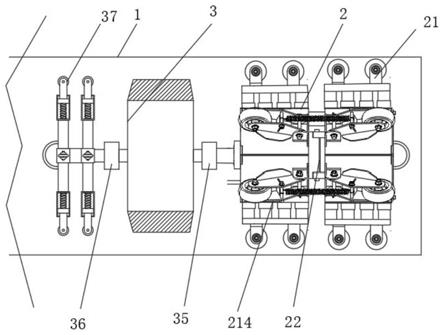
25.图2是本发明的行进模块结构示意图。
26.图3是本发明的连接组件结构示意图。
27.图4是本发明的弹性轮组结构示意图。
28.图5是本发明的多个滚轮的结构示意图。
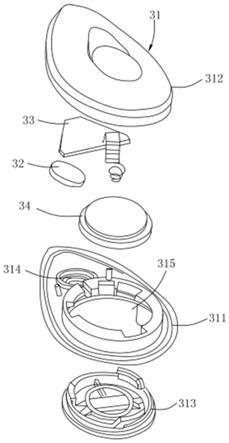
29.图6是本发明的清洁模块部分结构示意图。
30.图7是本发明的辅助组件结构示意图。
31.图1至图6中的各标注为:管道1、行进模块2、动力组件21、壳体211、气缸组212、爬行组件213、第一安装件2131、万向轮2132、第一滚轮2133、弹性轮组214、旋转台2141、轴承座2142、第二安装件2143、转动轴2144、弹簧2145、第二滚轮2146、连接组件22、第一万向轴221、轴承222、清洁模块3、传动轴31、第一转轴32、套件33、毛刷34、第二万向节35、第三万向
节36、辅助组件37、第二转轴371、第三安装件372、弹性支撑脚373、拉环38。
具体实施方式
32.工业生产中的管道并非直线设计,仍设计许多弯折处以避开障碍物或是节省空间,对于管道内壁附着物的定期清理,最优的仍是选用毛刷进行物理清理,常用的高压水枪结构清理范围有限,对于一些已安装且较长的管道并不适用,而化学清理本身知道腐蚀性,易形成新的沉淀附着物,同时可能腐蚀管道内壁,影响其使用寿命,市面上大部分管道清理机器人只采用一级动力组件,在管道狭小的空间中,一级动力组件易产生较大的热量,影响机器人的内部控制芯片。为此针对上述的问题设计一种具有清洁功能的行走机器人及清洁方法。
33.本实施例中的机器人包括行进模块2、清洁模块3,其中行进模块2采用多级动力组件21,设有至少一组动力组件21,一是为了增大机器人行进时的动力,二是为了将传统的动力组件21进行分割,减少单个动力组件21的在其行进向的长度,通过减少机器人行进过程中的线性接触,以适应管道1的局部弯折,从而使机器人在管道1内自由前行,而对于相对水平面有一定角度的管道1,通过多组动力组件21,增大与管道1内壁的接触面积,实现在管道1内壁的行进,在单个动力组件21外侧交替设有爬行组件213和弹性轮组214,爬行组件213与管道1内壁通过两者之间的摩擦力,使机器人行进,弹性轮组214弹性设于管道1内部滚动,用于辅助行进模块2处于管道1的中心位置,多组动力组件21之间通过连接组件22连接,例如第一个动力组件21、第二个动力组件21之间设有可以转动的连接组件22,消除在机器人越过管道1弯折时,第一个动力组件21和第二个动力组件21之间产生的角度偏差,在第二个动力组件21内还设有动力源,用于为清洁模块3提供工作动力,清洁模块3还设有辅助组件37,清洁模块3采用旋转方式进行清洁作业,清洁时对管道1有着作用力,反之管道1也对装置有着作用力,则需要增加支撑力,故增设了辅助组件37,即通过辅助组件37实现清洁模块3相对于管道1位置相对固定的支撑功能。
34.进一步的,一级动力组件21提供的动力组件21并不完全你能够支撑机器人持续行进,为此需要设计多级动力系统,例如清洁模块3的动力源安装在一级动力组件21,物无疑增大一级动力组件21的重量,需要爬行组件213提供更高的动能,更高动能下持续产生热量,在管道1狭窄的空间内,影响机器人的安全,在进一步的实施例中,通过多个动力组件21来分担行进模块2前进的所需要的动能,例如在第二个壳体211上设置与第一个动力组件21的壳体211的设置相同,而在第二个壳体211内则设有电机,通过带动传动轴31旋转传递动能至清洁模块3上,第二个动力组件21实际重量大于第一个动力组件21,仅通过自身的动力支撑机器人行进时,装置易过载,设计第二个动力组件21更大的动力时,其自身的形状空间无疑增大,便无法在管道1行进时偏转,为此通过多级动力组件21,一是为了减轻单个动力组件21的行进所需动力,二是为了减小动力组件21的自身的体积形状,进一步防止其行进方向上组件进行偏转时,自身长度与管道1内壁的接触卡死。
35.基于上述结构,对于管道1的定期清理是为了减少吸附物逐累积附着在管道1内部,形成堵塞或者污染,而在相对水平面有一定角度的管道1行进时,摩擦力较小,为了增大机器人在管道1移动时的摩擦力,在进一步的实施例中,通过增大机器人的爬行组件213与管道1之间的压力来增大摩擦力,实现机器人的正常行进工作,壳体211为多边形柱体且沿
着壳体211的内径中心在在其棱面上对称设置至少两组爬行组件213,爬行组件213通过气缸组212安装在壳体211的棱面上,气缸组212控制爬行组件213紧压在管道1内壁,使行进模块2在管道1内稳定行进,基于上述结构,爬行组件213带单个动力组件21在管道1弯折处行进时,需要爬行组件213对应管道1的弯折度进行偏转一定角度,在进一步的实施例中,为了越过管道1弯折处,爬行组件213上分为用于转向的万向轮2132和提供行进动力的第一滚轮2133,电机设于第一安装件2131上通过齿轮传动带动第一滚轮2133滚动,万向轮2132在前行中随着管道1的弯折而转向,控制爬行组件213转向,使其越过管道1弯折处,同时对壳体211作出其最大内径大于其棱长的设计,防止较长棱长的外壳件影响机器人在管道1内的转向。
36.基于上述结构,安装过多的爬行组件213增加行进机自身的重量,需要更大的动能,对于整个系统的同步控制时爬行组件213压紧管道1内壁也需要更加复杂的操作系统,为了提高行进模块2行进时的稳定性,在进一步的实施例中,分别在壳体211的其它棱面上安装可以旋转的第二滚轮2146,即通过旋转台2141安装轴承222座2142,轴承222座2142通过第二安装件2143安装第二滚轮2146和转动轴2144,其中位于两个相邻的动力组件21的壳体211上的转动轴2144通过弹簧2145连接,此时行进模块2在行进时,弹性轮组214始终紧密接触管道1内壁,辅助行进模块2稳定行进。
37.基于上述结构,在万向轮2132、第二滚轮2146、第一滚轮2133的行进路线上,轮子压紧附作物使的附着物进一步附着在管道1内壁,在进一步的实施例中,通过在轮子外侧设置例如防滑钉一样的结构,在轮子的行进路线上压碎附着物使附作物碎片脱离管道1内壁,同时进一步增大行进模块2与管道1内壁之间的摩擦力,使机器人稳定行进。
38.基于上述结构,多级动力装置在管道1弯折处行进时,前后动力组件21的会产生偏转角度,采用常规连接结构,多级动力组件21自身会卡死在管道1弯折处,在进一步的实施例中,利用连接组件22消除此类偏转角度,即在相邻的两个动力组件21的壳体211的相邻面内安装轴承222,用第一万向轴221的两端分别连接轴承222,消除两个动力组件21在管道1弯折处先后行进时产生的径向角度偏差,使行进模块2越过管道1弯折处。
39.基于上述结构,该机器人为定期对管道1内壁的清洁,管道1内壁附着物在其自身重力作用下易累积在管道1内壁,如果用化学液体进行清除的话,所需量较大,同时针对部分生活管道1形成二次污染,在进一步的实施例中,采用物理模式进行清除,定期通过毛刷34对管道1内壁进行物理洗刷,使附着物掉料至管道1底部,最后用清水冲刷即可,在第一转轴32上外设套件33,套件33表面设有毛刷34,毛刷34贴于管道1内部,通过第一转轴32旋转,使得毛刷34清管道1内的附着物,其中第一转轴32的转动力来自于第二外壳内的电机,即传动轴31通过第二万向节35连接第一转轴32,传递扭矩至第一旋转轴上,使得清洁模块3转动工作。
40.基于上述结构,清洁模块3自身转动时并不稳定,其毛刷34抵至管道1内壁,但是不足以使清洁模块3稳定转动,同时第二万向节35传递动力也会是清洁模块3转动时发生明显抖动,在进一步的实施例中,在清洁模块3的另一侧设置辅助组件37,用于控制清洁模块3旋转时的平稳,两个第三安装件372平行套设于第二转轴371外侧,第三安装件372分别安装多个弹性支撑脚373,即可以形成一个在运动时及时调整中心位置的相对稳定的支撑件,此类调整往往发生于管道1弯折处,在辅助组件37越过管道1弯折处时,进行回正,第二转轴371
通过第三万向节36连接于第一转轴32,而第一转轴32另一端连接第二万向节35,形成一个万向节结构,在转向运动过程中,行进过程在产生的偏差,即辅助组件37行进时产生角度偏差通过第三万向节36消除,此期间两端连接两个万向轴的第一转轴32持续旋转,万向轴持续传递扭矩,使清洁模块3持续工作。
41.基于上述结构,对于管道1内壁的清洁,管道1由于其特殊性,如清洁时间较长、管道1较长、管道1屏蔽部分信号、部分已安装管道1不便拆卸、机器人自身故障暂停工作,需要对于机器人仍需要做出一种预防措施,在进一步的实施例中,即通过在壳体211的末端设有拉环38,拉环38的另一端连接绳索,除却机器人工作完后取出机器人外,在机器人超出其预期工作范围产生故障时,对机器人进行便捷回收。
42.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。