技术特征:
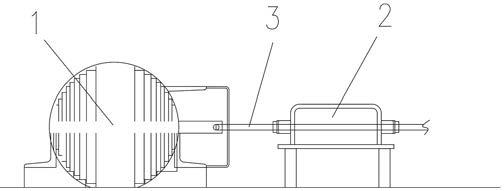
1.一种用于平面电机(3)的穿梭件(2)的引导装置(1),其中,所述引导装置(1)具有第一端部(4)和第二端部(5),并且在所述第一端部(4)和第二端部(5)之间限定穿梭件(2)的姿态走向(6),其中,所述第一端部(4)限定穿梭件(2)的导入姿态(7),并且所述第一端部(4)在平面电机(3)的第一定子(8
‘
)处能设置成,使得所述导入姿态(7)相对于第一定子(8
‘
)对应于能基于运行地操控的姿态(12),其特征在于,所述第二端部(5)限定穿梭件(2)的导出姿态(9),所述第二端部(5)在平面电机(3)的第一定子(8
‘
)或第二定子(8“)处能设置成,使得所述导出姿态(9)相对于第一定子(8
‘
)或第二定子(8“)对应于能基于运行地操控的姿态,其中,姿态走向(6)包括至少一个姿态,所述至少一个姿态相对于平面电机(3)的各所述定子(8)是不能基于运行地操控的姿态,并且所述引导装置(1)支撑和稳定在不能基于运行地操控的所述至少一个姿态中的穿梭件(2)。2.如权利要求1所述的引导装置(1),其特征在于,所述穿梭件(2)沿着姿态走向(6)从第一端部(4)至第二端部(5)的可运动性能通过平面电机(3)的各所述定子(8)确保。3.如权利要求1或2所述的引导装置(1),其特征在于,不能基于运行地操控的所述至少一个姿态与能基于运行地操控的姿态(12)具有偏转角(ψ)的和/或俯仰角(θ)的和/或滚动角的和/或提升高度(z)的偏差。4.如权利要求1至3中任一项所述的引导装置(1),其特征在于,所述引导装置(1)的姿态走向(6)基本上平行于平面电机的运输平面(10)延伸。5.如权利要求1至4中任一项所述的引导装置(1),其特征在于,所述引导装置(1)对于穿梭件(2)限定在一个或两个方向上从平面电机(3)的第一运输平面(10)至第二运输平面(10
‘
)的姿态走向(6)。6.如权利要求5所述的引导装置(1),其特征在于,所述第一运输平面(10)平行于第二运输平面(10
‘
)设置。7.如权利要求5所述的引导装置(1),其特征在于,所述第一运输平面(10)和所述第二运输平面(10
‘
)形成一个角度、尤其是一个直角。8.如权利要求1至7中任一项所述的引导装置(1),其特征在于,所述引导装置(1)在第一端部(4)与第二端部(5)之间构成用于穿梭件(2)的桥和/或下部引导件。9.如权利要求1至8中任一项所述的引导装置(1),其特征在于,所述引导装置(1)具有机械的引导件和/或磁性的引导件和/或电磁的引导件和/或气动的引导件。10.如权利要求1至9中任一项所述的引导装置(1),其特征在于,不能基于运行地操控的所述至少一个姿态违背对于平面电机(3)的安全的和/或有效率的运行的规定,和/或不能基于运行地操控的所述至少一个姿态不满足对于穿梭件(2)的要求的稳定性的规定,和/或不能基于运行地操控的所述至少一个姿态本身不能利用平面电机(3)的定子(8)来设定。11.如权利要求1至10中任一项所述的引导装置(1),其特征在于,所述姿态走向(6)包括被动的、亦即无法由平面电机(3)的定子(8)致动的运动区段,所述运动区段能由穿梭件(2)借助动能和/或势能驶过。12.如权利要求1至11中任一项所述的引导装置(1),其特征在于,所述穿梭件(2)在整个姿态走向(6)中的至少一个自由度方面的位置通过平面电机(3)的传感机构至少能估算、并且优选能测量。
13.一种平面电机(3),包括至少一个第一定子(8
‘
)和至少一个如权利要求1至12中任一项所述的引导装置(1),其中,所述第一端部(4)设置在第一定子(8
‘
)处,所述导入姿态(7)相对于第一定子(8
‘
)对应于能基于运行地操控的姿态,所述第二端部设置在第一定子(8
‘
)或第二定子(8“)处,并且所述导出姿态(9)相对于第一定子(8
‘
)或第二定子(8“)对应于能基于运行地操控的姿态。14.如权利要求13所述的平面电机(3),其特征在于,在所述引导装置(1)上设置有至少一个加工站(11)。15.如权利要求13或14所述的平面电机(3),其特征在于,所述平面电机(3)具有至少一个设置在第一运输平面(10)中的定子(8)并且具有至少一个设置在第二运输平面(10
‘
)中的定子(8),其中,至少一个引导装置(1)对于穿梭件(2)限定在一个或两个方向上从第一运输平面(10)至第二运输平面(10
‘
)的姿态走向(6)。16.一种利用如权利要求13至15中任一项所述的平面电机(3)运输穿梭件(2)的方法,其中,所述方法具有如下步骤:
‑
利用第一定子(8
‘
)将穿梭件(2)浮动地设置在引导装置(1)的导入姿态(7)中,
‑
利用至少所述第一定子(8
‘
)使穿梭件(2)在引导装置(1)的姿态走向(6)的方向上运动和可选地加速,
‑
使穿梭件(2)继续运动经过至少一个穿梭件位置,直至所述穿梭件达到导出姿态(9),所述至少一个穿梭件位置相对于平面电机(3)的定子(8)是不能基于运行地操控的姿态,其中,所述引导装置(1)支撑和稳定在不能基于运行地操控的至少一个位置中的穿梭件(2)。17.如权利要求16所述的方法,其特征在于,所述继续运动在利用磁场的情况下实现,所述磁场由平面电机(3)的定子(8)建立。18.如权利要求16或17所述的方法,其特征在于,所述继续运动在利用穿梭件(2)的动能的情况下实现。19.如权利要求16至18中任一项所述的方法,其特征在于,所述继续运动在利用穿梭件(2)的势能的情况下实现。20.如权利要求16至19中任一项所述的方法,其特征在于,所述继续运动通过利用至少一个另外的穿梭件的推动和/或拉动实现。
技术总结
本发明涉及一种引导装置、一种平面电机和一种运输穿梭件的方法,所述引导装置具有第一端部和第二端部,在第一端部和第二端部之间限定穿梭件的姿态走向,第一端部限定穿梭件的导入姿态,第一端部在平面电机的第一定子处能设置成,使得导入姿态相对于第一定子对应于能基于运行地操控的姿态,第二端部限定穿梭件的导出姿态,第二端部在平面电机的第一定子或第二定子处能设置成,使得所述导出姿态相对于第一定子或第二定子对应于能基于运行地操控的姿态,姿态走向包括至少一个姿态,至少一个姿态相对于平面电机的各所述定子是不能基于运行地操控的姿态,所述引导装置支撑和稳定在不能基于运行地操控的所述至少一个姿态中的穿梭件。件。件。
技术研发人员:S
受保护的技术使用者:B和R工业自动化有限公司
技术研发日:2021.04.27
技术公布日:2021/11/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。