1.本公开涉及对存在于车辆周围的物体进行检测的检测装置及检测方法。
背景技术:
2.公开了一种技术,其用被搭载于车辆的激光雷达装置来对车辆行进方向的物体进行检测(例如,参照专利文献1)。
3.先行技术文献
4.专利文献
5.专利文献1:日本国特开2016
‑
114398号公报
技术实现要素:
6.发明要解决的技术问题
7.在车辆在湿路面上行驶时,在车辆的附近会产生水花。在对车辆周边的物体进行检测的检测装置用激光雷达装置来对车辆周边的物体进行检测的情况下,会产生如下这样的问题:检测装置将车辆在湿道路上行驶时产生的水花误检测为检测对象物体。
8.本公开的目的为提供一种抑制对车辆周边的物体进行检测的装置将水花或泥点误检测为检测对象物体的技术。
9.用于解决技术问题的技术手段
10.本公开的第1方案为一种检测装置,包括:检测部,其对存在于车辆周边的物体进行检测;确定部,其对所述检测部持续地检测到所述物体的检测持续时间进行确定;以及信息输出部,其以所述确定部所确定的所述检测持续时间超过预定时间为条件来输出存在信息,该存在信息表示所述检测部检测到了检测对象物体。
11.例如,所述检测部还对检测到所述物体的时间点的所述物体与所述车辆的距离进行检测,在所述检测部最初检测到所述物体的时间点的所述距离在作为检测水花或泥点的距离而被预先设定的判定距离以下,且所述检测持续时间为所述预定时间以下的情况下,所述信息输出部不输出所述存在信息。
12.例如,所述检测部还对所述物体与所述车辆的相对速度进行检测,所述信息输出部以所述检测部所检测到的所述相对速度为预定值以上为条件,输出所述存在信息。
13.也可以是,所述检测装置还包括降雨确定部,该降雨确定部对所述车辆所行驶的道路的降雨状况进行确定,所述信息输出部基于所述降雨确定部所确定的所述道路的降雨状况来判定是否输出所述存在信息。
14.也可以是,所述降雨确定部对所述车辆所行驶的所述道路中的降雨量进行确定,所述降雨确定部所确定的所述降雨量越多,所述信息输出部就使所述预定时间越长。
15.也可以是,所述检测装置还包括其他的检测部,该其他的检测部用与所述检测部不同的方法来对存在于所述车辆周边的物体进行检测,所述信息输出部以判定为所述其他的检测部所检测到的物体与所述检测部所检测到的物体是相同的物体为条件,输出所述存
在信息。
16.本公开的第2方案为一种检测方法,具有被搭载于车辆的处理器所执行的以下步骤:对存在于所述车辆周边的物体进行检测的步骤;对持续地检测到所述物体的检测持续时间进行确定的步骤;以及以确定的所述检测持续时间超过预定时间为条件,输出表示检测到了检测对象物体的信息的步骤。
17.发明效果
18.根据本公开,能够抑制对车辆周边的物体进行检测的装置将水花或泥点误检测为检测对象物体的情况。
附图说明
19.图1是用于说明一个实施方式的概要的图。
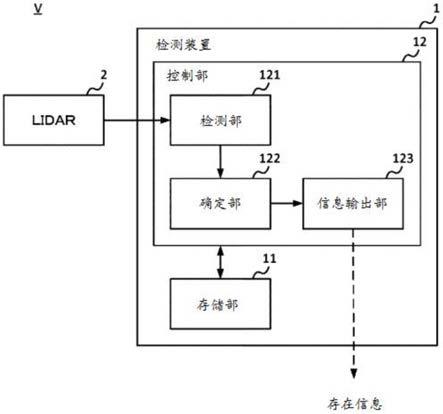
20.图2是表示检测装置的构成的图。
21.图3是表示判定距离的一例的图。
22.图4是表示判定距离的另一例的图。
23.图5是表示输出存在信息的处理的流程的流程图。
24.图6是表示变形例1的检测装置的构成的图。
25.图7是表示变形例2的检测装置的构成的图。
具体实施方式
26.[实施方式的概要]
[0027]
图1是用于说明一个实施方式的概要的图。图1是示意性地表示车辆v在湿道路上行驶的状况的图。车辆v包括激光雷达装置(以下,称为lidar),该激光雷达装置使激光脉冲状地发出,向物体照射,并基于照射所对应的散射光来测定到物体的距离。
[0028]
实施方式的检测装置对lidar所检测到的存在于车辆v周围的物体进行追踪(tracking)。追踪为如下的处理:使检测到的物体与识别编号相关联地存储于存储部,并持续地对lidar所检测到的时间序列的多个物体中的同一物体进行确定。检测装置基于追踪的结果来对判定为同一物体持续地存在的时间即检测持续时间进行确定。然后,检测装置以确定的检测持续时间超过预定时间为条件,输出表示检测到检测对象物体的存在信息。
[0029]
车辆v周围的其他车辆及始终存在于道路上的物体在lidar照射的激光到达期间,会持续地被检测。与此不同,车辆v在湿道路上行驶时产生的水花w是暂时产生的,因此被lidar持续地检测的时间与其他物体相比较短。因此,检测装置在检测持续时间为预定时间以下的情况下,不会判定为存在检测对象物体,并以检测持续时间超过预定时间为条件来判定为存在检测对象物体,由此检测装置难以将水花w误检测为检测对象物体。
[0030]
[实施方式的检测装置1的构成]
[0031]
图2是表示检测装置1的构成的图。搭载有检测装置1的车辆v包括lidar2。lidar2将对车辆v周围的物体进行检测的结果(以下,称为检测结果)向检测装置1输出。检测结果例如为表示通过脉冲反射得到的点群的坐标、或检测到的物体的位置、形状、尺寸的数值数据。lidar2例如每隔50ms将检测结果输出到检测装置1。
[0032]
检测装置1具有存储部11和控制部12。存储部11例如为rom(read only memory:只
读存储器)或ram(random access memory:随机存取存储器)。存储部11存储用于使控制部12发挥功能的各种程序。
[0033]
控制部12为包含cpu(central processing unit:中央处理器)等处理器的计算资源。控制部12通过执行被存储于存储部11中的程序来实现作为检测部121、确定部122及信息输出部123的功能。
[0034]
检测部121对存在于车辆v周边的物体进行检测。例如,检测部121通过对lidar2所输出的检测结果进行分析,从而实施物体位置的确定或追踪。检测部121将最初确定了物体的时刻作为物体检测开始时刻而存储于存储部11。每次被lidar2通知检测结果时,检测部121都会判定在检测结果中是否包含被推定为与最初确定的物体为同一物体的物体。检测部121在判定为在检测结果中包含被推定为与最初确定的物体为同一物体的物体(追踪中的物体)的情况下,将被通知了该检测结果的时刻作为持续检测时刻而存储于存储部11。
[0035]
此外,检测部121基于物体位置的变化来对物体与车辆v的相对速度进行检测。也可以是,检测部121对检测到物体的时间点的物体与车辆v的初始检测距离进行检测。检测部121将检测到的相对速度及初始检测距离通知给确定部122。
[0036]
确定部122对检测部121持续地检测到物体的检测持续时间进行确定。例如,确定部122将检测部121存储到存储部11的最新的持续检测时刻与物体检测开始时刻之差作为检测持续时间。
[0037]
信息输出部123以确定部122所确定的检测持续时间超过用于判定是否为检测对象物体的判定时间为条件,输出表示检测部121检测到检测对象物体的存在信息。此外,信息输出部123在检测持续时间为判定时间以内的情况下,不会输出物体的存在信息。判定时间例如比假定从水花w产生起到消失为止所需的最大时间更长。通过这样去做,检测装置1能够抑制将经过一定时间后会消失的水花误检测为检测对象物体并输出存在信息的情况。
[0038]
信息输出部123例如将存在信息输出到被设置于车辆v的驾驶员座的显示器或进行车辆v的行驶控制的行驶控制装置。通过信息输出部123像这样地进行动作,车辆v的驾驶员或行驶控制装置能够掌握在周边行驶的其他车辆a的存在。
[0039]
在车辆v行驶时产生的水花w会持续地存在于车辆v的附近。因此,检测部121在检测到水花w的情况下,会在相同位置持续检测到相同形状的物体。结果,水花w与车辆v的相对速度会成为接近零的值。因此,信息输出部123可以将物体与车辆v的相对速度为预定值以上作为输出存在信息的条件。例如,信息输出部123以检测部121所检测到的物体与车辆v的相对速度为用于判定检测到的物体是否为水花w的判定速度以上为条件来输出存在信息。判定速度为考虑到lidar2的测定结果中包含的误差的值,例如为时速5公里。通过这样去做,检测装置1能够抑制将与车辆v的相对速度大致为零的水花w误检测为检测对象物体的情况。
[0040]
此外,水花w会在车辆v的附近产生,在离开车辆v某一程度的地方则不会产生。因此,信息输出部123也可以设定为:在检测部121最初检测到物体的时间点的物体与车辆v的距离为作为检测水花w的距离而预先设定的判定距离以下,且检测持续时间为预定时间以下的情况下,不输出存在信息。信息输出部123在从车辆v的外缘到物体的检测距离大于判定距离的情况下,输出存在信息。
[0041]
图3是表示判定距离的一例的图。图3所示的判定距离l例如为2米。信息输出部123
在检测部121最初检测到物体的时间点的物体的位置为图3所示的虚线r1的内侧,且检测持续时间为预定时间以下的情况下,不会将被检测到的物体判定为检测对象物体,由此,能够使检测装置1难以对在车辆v附近产生的水花w进行误检测。
[0042]
图4为表示判定距离的另一例的图。在车辆v向前方行驶的情况下,关于检测部121最初可检测到水花w的范围,与车辆v的前方相比,车辆v的后方更大。因此,在图4所示的例子中,判定距离根据车辆的位置而不同。即,车辆前方处的判定距离为l1,车辆后方处的判定距离为比l1更大的l2。
[0043]
另外,在车辆v通过水洼的情况下,在车辆的前轮通过水洼后,车辆的后轮会通过水洼,因此在车辆v前方产生的水花w的量存在比在车辆v后方产生的水花w的量更多的倾向。因此,会存在如下倾向:在车辆v前方产生的水花被持续地确定为同一物体的时间比在车辆v后方产生的水花w被持续地确定为同一物体的时间更长。因此,也可以是,信息输出部123根据检测部121最初确定物体的位置来改变判定时间。例如,信息输出部123使被用作对在车辆v的行进方向侧被检测到的物体是否为检测对象物体进行判定的阈值的判定时间比被用作对在车辆v行进方向的相反侧被检测到的物体是否为检测对象物体进行判定的阈值的判定时间更长。通过这样去做,即使在车辆v前方产生的水花w被持续地检测为物体的时间比在车辆v后方产生的水花w被持续地检测为物体的时间更长的情况下,检测装置1也难以将在车辆v前方产生的水花w误检测为检测对象物体。
[0044]
图5是表示输出存在信息的处理的流程的流程图。首先,检测部121对检测到的物体进行追踪(步骤s1)。接着,信息输出部123对检测到物体的初始位置是否在判定距离内进行判定(步骤s2)。
[0045]
确定部122在检测到物体的初始位置在判定距离内的情况下(在步骤s2中,为“是”),对检测持续时间进行确定(步骤s3)。信息输出部123对检测持续时间是否在判定时间以内进行判定(步骤s4)。信息输出部123在检测持续时间为判定时间以内的情况下(在步骤s4中,为“是”),对检测部121所检测到的相对速度是否为判定速度以下进行判定(步骤s5)。
[0046]
信息输出部123在相对速度为预定速度以下的情况下(在步骤s5中,为“是”),不输出存在信息(步骤s6)。然后,信息输出部123对检测部121是否正在追踪物体进行判定(步骤s7)。信息输出部123在检测部121正在追踪物体的情况下(在步骤s7中,为“是”),回到步骤s3。信息输出部123在检测部121未追踪物体的情况下(在步骤s7中,为“否”),不输出存在信息,而是结束处理。
[0047]
信息输出部123在初始检测位置大于判定距离的情况下(在步骤s2中,为“否”)、检测时间大于判定时间的情况下(在步骤s4中,为“否”)、或相对速度大于判定速度的情况下(在步骤s5中,为“否”),输出存在信息(步骤s8)。通过这样去做,检测装置1能够输出表示实际存在的车辆v或人等物体的存在的存在信息。此外,即使检测到经过一定时间后会消失的水花w,检测装置1也不会输出存在信息。因此,检测装置1能够抑制将水花w误检测为检测对象物体的情况。
[0048]
(变形例1)
[0049]
也可以是,检测装置1基于车辆v所行驶的道路的降雨状况来决定是否输出存在信息。图6是表示变形例1的检测装置1的构成的图。变形例1的检测装置1的控制部12通过执行
被存储于存储部11的程序来实现作为降雨确定部124的功能。
[0050]
降雨确定部124对车辆v所行驶的道路的降雨状况进行确定。例如,降雨确定部124对车辆v所行驶的道路上是否下了雨进行确定。具体而言,降雨确定部124对在当前时刻以前的时刻是否下了雨进行确定。例如,降雨确定部124在车辆v的刮水器在当前时刻以前的时刻一直进行工作的情况下,确定道路上下了雨。
[0051]
在降雨确定部124确定了道路上未下雨的情况下,即使检测持续时间为判定时间以下,信息输出部123也会输出存在信息。在降雨确定部124确定了道路上下了雨的情况下,信息输出部123以检测持续时间超过判定时间为条件,输出存在信息。通过这样去做,检测装置1能够防止在道路上未下雨而不会产生水花w的状况下,误判定为检测部121所检测到的物体为水花w,并且减少控制部12的负荷。
[0052]
也可以是,降雨确定部124对在当前时刻是否正在下雨进行确定。例如,降雨确定部124在车辆v的刮水器为工作状态的情况下,确定在当前时刻正在下雨,在车辆v的刮水器不为工作状态的情况下,确定在当前时刻并未下雨。在降雨确定部124确定了在当前时刻正在下雨的情况下,信息输出部123以检测持续时间超过判定时间为条件输出存在信息。在降雨确定部124确定了在当前时刻并未下雨的情况下,即使检测持续时间为判定时间以下,信息输出部123也会输出存在信息。通过这样去做,检测装置1能够抑制在易产生水花的降雨中,将水花w误检测为检测对象物体的情况。
[0053]
降雨量越多,存在于道路的水量就会越多。当存在于道路的水量变多时,在车辆v行驶的情况下产生的水花w的量也会变多,到车辆v周围产生的水花w消失为止所需的时间会变长。因此,检测装置1基于车辆v所行驶的道路中的降雨量来改变用于判定是否为检测对象物体的判定时间。
[0054]
也可以是,降雨确定部124对车辆v所行驶的道路中的降雨量进行确定。例如,降雨确定部124确定为每单位时间的刮水器的动作次数越多,降雨量就越多。另外,也可以是,降雨确定部124取得表示包含所行驶的道路的地域的天气的信息,并基于取得的表示天气的天气信息来确定是否下了雨。在该情况下,降雨确定部124基于天气信息所包含的表示降雨量的信息来确定降雨量。降雨确定部124所确定的降雨量越多,信息输出部123就会使判定时间越长。通过这样去做,即使到水花w消失为止所需的时间变长,检测装置1也能够抑制将水花w误检测为检测对象物体的情况。
[0055]
另外,也可以是,降雨确定部124对在晚于当前时刻的时刻是否会下雨进行确定。首先,降雨确定部124基于予测了晚于当前时刻的时刻的天气的天气预报信息,在多个未来时刻,分别确定表示降雨可能性的降水概率。降雨确定部124对降水概率为预定值以上的时刻进行确定。预定值例如为30%。然后,在到经过降雨确定部124所确定的降水概率成为预定值以上的时刻为止的期间,即使检测持续时间为判定时间以下,信息输出部123也输出存在信息。此外,在经过了降水概率为预定值以上的时刻后的时刻,信息输出部123以检测持续时间超过判定时间为条件,输出存在信息。
[0056]
(变形例2)
[0057]
也可以是,检测装置1在判定为基于车辆v所具备的lidar2所检测到的检测结果而检测到的物体和用与lidar2不同的传感器检测到的物体为相同物体的情况下,输出存在信息。图7是表示变形例2的检测装置1的构成的图。搭载有变形例2的检测装置1的车辆v包括
与lidar2不同的传感器3。传感器3例如是作为难以对水花进行误检测的传感器的毫米波雷达,或是作为容易确定检测对象物体的种类的传感器的照相机。
[0058]
变形例2的检测装置1的控制部12通过执行被存储于存储部11的程序来实现作为第1检测部125及第2检测部126的功能。另外,第1检测部125与在上述内容中说明的检测部121相同,因此省略说明。
[0059]
第2检测部126用与第1检测部125不同的方法来对存在于车辆v周边的物体进行检测。例如,在传感器3为照相机的情况下,第2检测部126通过对照相机所拍摄到的拍摄图像进行分析来对存在于车辆v周边的物体进行检测。具体而言,第2检测部126对检测到物体的位置及时刻进行确定。此外,也可以是,第2检测部126对车辆v与物体的距离、以及物体与车辆v的相对速度进行确定。
[0060]
信息输出部123对第1检测部125所检测到的物体与第2检测部126所检测到的物体是否为同一物体进行判定。例如,在第1检测部125检测到物体的位置及时刻与第2检测部126检测到物体的位置及时刻一致的情况下,信息输出部123判定为是同一物体,在不一致的情况下,判定为不是同一物体。此外,也可以是,信息输出部123基于车辆v与物体的距离、或物体与车辆v的相对速度是否一致来判定是否为同一物体。然后,信息输出部123以判定为第1检测部125所检测到的物体与第2检测部126所检测到的物体是相同物体为条件,输出存在信息。
[0061]
如此,不仅是lidar2的信息,检测装置1还用其他传感器的信息来对物体进行检测。因此,与仅用lidar2的信息来检测物体的情况相比,检测装置1难以将水花w误检测为检测对象物体。
[0062]
[实施方式的检测装置1的效果]
[0063]
如以上说明的那样,检测装置1将持续地检测到存在于车辆周边的物体的检测持续时间超过判定时间作为条件,输出表示存在检测到的物体的信息。通过这样去做,检测装置1不会输出在经过从水花w产生起到消失为止所需的时间前变得无法追踪的物体的存在信息,因此能够抑制将水花w误检测为检测对象物体的情况。
[0064]
以上,虽然用实施方式对本公开进行了说明,但本公开的技术范围不被限定于上述实施方式所记载的范围,在其主旨的范围内,能够进行各种变形及变更。例如,装置的全部或一部分能够以用任意单位功能性地或物理地进行分散、整合的方式构成。此外,通过多个实施方式的任意组合产生的新的实施方式也被包含在本公开的实施方式中。通过组合产生的新实施方式的效果兼具原实施方式的效果。
[0065]
本技术基于2019年3月27日申请的日本国专利申请(日本特愿2019
‑
061342),并将其内容作为参照援引于此。
[0066]
工业可利用性
[0067]
本公开的检测装置及检测方法在抑制对车辆周边的物体进行检测的装置将水花或泥点误检测为检测对象物体这一点上是有用的。
[0068]
附图标记说明
[0069]
1 检测装置
[0070]
2 lidar
[0071]
3 传感器
[0072]
11 存储部
[0073]
12 控制部
[0074]
121 检测部
[0075]
122 确定部
[0076]
123 信息输出部
[0077]
124 降雨确定部
[0078]
125 第1检测部
[0079]
126 第2检测部
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。