1.本发明涉及油气田勘探开发技术领域,具体地涉及一种结合地表和地下双因素的观测系统智能变观方法。
背景技术:
2.随着复杂构造油气藏、薄层岩性油气藏、页岩油气资源等勘探开发程度的加深,在地震数据野外采集中,需要设计全方位、高密度的观测系统,观测系统具有宽方位、宽频带、高密度、高覆盖次数、单点接收、小炮间距、小道间距的特点。设计“两宽一高”或高密度全方位的野外观测系统,对于改善地震资料成像效果、提高储层描述精度具有重要作用,但是由于复杂地表障碍物的不利影响,使得实际施工观测系统存在严重的变观问题,从而影响了后续的地震资料处理和综合解释。国内外专家学者对采集观测系统的设计准则、施工参数选取以及野外施工步骤进行了详细的研究,基于波动方程的地下储层地震照明分析,可以优化复杂地表区观测系统的野外施工方案,并可以针对地下目的层能量屏蔽区与弱能量反射区,通过炮点变观、加密炮点、增加排列等手段,对观测系统进行变观,从而保证施工质量。
3.常规方法通常采用二维卫星图片平面图,进行手工的拾取和标定障碍物位置,然后将障碍物内的炮点和检波点移动出去,存在施工效率低、变观没有依据、未考虑地下目的层、缺乏监控手段的问题。因此,有必要设计一种能够在有效规避近地表障碍物影响的同时,确保地下目的层精确成像和储层预测需要的结合地表和地下双因素的观测系统智能变观方法。
技术实现要素:
4.本发明的目的在于提供一种结合地表和地下双因素的观测系统智能变观方法,快速高效地得到最优的野外采集观测系统。
5.本发明解决其技术问题所采取的技术方案是:
6.步骤1、根据施工工区的资料成果、地表条件、构造特征、储层类型和地质任务,建立浅中深层三维高精度速度和地质模型,并设计规则的观测系统,输出规则观测系统sps(shell procession support format)文件;
7.具体的,所述浅中深层三维高精度速度和地质模型建立过程如下:利用三维地震资料进行速度分析和速度迭代优化,通过道集及成像剖面的质量监控,获得中深层速度模型;在速度模型的基础上,结合构造特征、储层类型和地质任务建立中深层模型,模型深度大于500米,最深可达10000米。利用近地表低降速带调查结果得到的层速度和层厚度,以及大炮初至层析反演速度模型,进行综合建模,可以得到高精度的浅层速度和地质模型,深度在500米以内,在此基础上,将中深层和浅层模型进行融合,建立浅中深层三维高精度速度和地质模型。
8.根据地质目标需求设计规则观测系统,即进行采集参数论证,确定基本采集参数,
例如:面元大小、最小偏移距、最大偏移距等,通过采集参数优选后可以得到规则观测系统。
9.步骤2、根据施工工区的卫星图片、地表高程、野外踏勘照片和近地表低降速带调查结果,建立真地表三维构造模型,在该模型中进行野外施工地表障碍物的自动识别和圈定,结合障碍物特点及安全施工要求,将圈定的障碍物进行分类,并根据分类情况设定激发点施工可行距离;
10.具体的,在步骤1中建立了浅层速度和地质模型,该模型只包含速度和地质信息,在此模型基础上,利用卫星图片、地表高程、野外踏勘照片和近地表低降速带调查结果,补充起伏高程、地表障碍物、近地表吸收衰减特性、岩性特征等信息,建立真地表三维构造模型。浅中深层三维高精度速度和地质模型应用于逼真照明,选择炮点和检波点变观最优位置;真地表三维构造模型应用于障碍物的识别与圈定,以及炮点和检波点的自动变观,初步标定可供选择的多个变观位置。
11.步骤3、将规则观测系统投影到真地表三维构造模型中,根据圈定的地表障碍物位置,结合障碍物分类情况,自动选取需要变观的炮点和检波点,利用自动变观算法,将选取的炮点和检波点进行移动,在进行炮点移动时,结合激发点施工可行距离,初步标定可供炮点和检波点选择的多个变观位置;
12.步骤4、在浅中深层三维高精度速度和地质模型中标定目的层位置,利用高斯束逆向逼真照明方法,从地下目的层向上照明,将初步标定可供炮点和检波点选择的多个变观位置投影到真地表三维构造模型中,通过真地表照明强度选择炮点和检波点变观位置;
13.步骤5、输出智能变观炮点和检波点位置信息,并与无需变观的炮点和检波点进行合并,计算观测系统覆盖次数、炮道密度、方位角、炮检距均匀分布和成像算子属性图,量化评价自动变观后的观测系统;
14.步骤6、根据量化评价结果,若不满足观测系统施工要求,则需要根据量化评价结果调整变观位置、加密炮点或检波点;若满足观测系统施工要求,则输出最终的观测系统sps文件,完成了观测系统的智能变观。
15.在步骤1中,所述浅中深层三维高精度速度和地质模型是根据资料成果、地表条件、构造特征、储层类型和地质任务建立的,不仅包含地层和速度信息,而且包含近地表、地下构造和储层等信息,是一个包含浅中深层信息的三维高精度混合模型。
16.作为优选技术方案,在步骤2中,所述真地表三维构造模型是根据卫星图片、近地表速度、q体、地表高程和野外踏勘照片建立的,通过经纬度坐标、低降速带厚度和地表高程真实的反映了地表障碍物的变化情况,同时包含不同位置的吸收衰减特性,实现了由二维平面标量图向三位立体矢量图的转变。
17.作为优选技术方案,在步骤2中,在真地表三维构造模型中自动圈定地表障碍物,地表障碍物信息包括:经纬度坐标、低降速带厚度、吸收衰减特性、地表高程等。将障碍物进行分类,障碍物主要包括:村镇、工厂、河流、公路、养殖场、疏松沉积带、巨厚低速区、井场和高陡山丘等,其中:养殖场、井场、高陡山丘属于i类障碍物;村镇、工厂属于ii类障碍物;公路、河流、疏松沉积带、巨厚低速区属于iii类障碍物。i类障碍物激发点施工可行距离20-30m,ii类障碍物激发点施工可行距离10-15m,iii类障碍物激发点施工可行距离5-8m。
18.作为优选技术方案,在步骤3中,将规则观测系统sps文件导入,炮点和检波点投影到真地表三维构造模型中,根据圈定的地表障碍物位置,结合障碍物分类情况,自动选取需
要变观的炮点和检波点。所述自动选取需要变观的炮点和检波点方法为,假定炮点或检波点为r&s,同时考虑地表高程的影响,障碍物范围为一多边形区域area,从r&s点向上方或下方垂直方向试射射线,射线与多边形区域area会产生交点数,根据交点个数判断r&s点是否在多边形区域area内。若交点数为奇数或高程突变超出预设阈值,则r&s点在多边形区域area内;若交点数为偶数,则r&s点不在多边形区域area内。遍历搜索所有炮点和检波点,从而得到落入障碍物中的炮检点,并形成无需变观的观测系统sps文件、需要变观的观测系统sps文件。
19.作为优选技术方案,在步骤3,利用自动变观算法,导入需要变观的观测系统sps文件,将选取的炮点和检波点进行移动。所述自动变观算法为,读取某一障碍物范围内的炮检点,根据炮检点落入障碍物的位置,按照从中间到两边、从下到上的原则,确定障碍物内每一个炮检点的移动顺序,然后按照规划的移动顺序,上下交替搜索障碍物之外的可放置空点,将炮检点移动到障碍物外侧。多个障碍物的情况下,障碍物计算顺序从上到下依次进行。在进行炮点移动时,结合三类障碍物的激发点施工可行距离,进行炮点的自动变观。
20.作为优选技术方案,在步骤4,在浅中深层三维高精度速度和地质模型中标定目的层位置,目的层可以是浊积岩或砂砾岩体的局部储层,也可以是河流相沉积的全局储层,利用高斯束逆向逼真照明方法从目的层向上照明,射线穿过浅中深层三维高精度速度和地质模型,以及真地表三维构造模型,最终射线束到达地面,射线束考虑了地层的吸收衰减和传播路径损失,根据地面的射线束照明强度来优选最佳的炮点和检波点变观位置。
21.作为优选技术方案,在步骤5,输出优选后的智能变观炮点和检波点位置信息,计算观测系统覆盖次数、炮道密度、方位角、炮检距均匀分布和成像算子属性图。提出的量化评价公式为:θ=α
×
fold ρ
×
st β
×
zip φ
×
rs λ
×
im,其中:α为覆盖次数权重系数,fold为覆盖次数,ρ为炮道密度权重系数,st为炮道密度,β为方位角权重系数,zip为方位角,φ为炮检距均匀分布权重系数,rs为炮检距均匀分布,λ为成像算子权重系数,im为成像算子。
22.作为优选技术方案,在步骤6,综合考虑观测系统覆盖次数、炮道密度、方位角、炮检距均匀分布和成像算子属性,评价智能变观后的观测系统,根据量化评价结果决定是否需要调整变观位置、加密炮点或检波。直到满足规避地表障碍物和地下目的层充分照明的要求,则输出最终的观测系统sps文件,完成了观测系统的智能变观。
23.本发明的技术效果:
24.与现有技术相比,本发明的一种结合地表和地下双因素的观测系统智能变观方法,在观测系统变观中建立了真地表三维构造模型、浅中深层三维高精度速度和地质模型,从地表和地下两个因素考虑观测系统变观的不利影响。在真地表三维构造模型中进行障碍物自动圈定、障碍物分类、自动选取需要变观的炮点和检波点,综合定量化评估经纬度坐标、低降速带厚度、吸收衰减特性、地表高程等障碍物信息,通过自动变观和高斯束逆向逼真照明方法,根据地面的射线束照明强度来优选最佳的炮点和检波点变观位置。在有效规避近地表障碍物影响的同时,确保了地下目的层精确成像和储层预测的要求,智能变观后的观测系统为能够保证获取到高品质的原始数据,为后续精细处理和综合解释奠定了基础。
附图说明
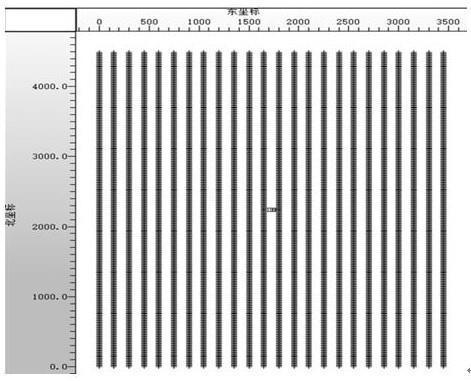
25.图1为本发明中的设计规则观测系统示意图;
26.图2为本发明中设计规则观测系统在障碍物投影的分布图;
27.图3为本发明中观测系统自动变观后的炮检点分布图;
28.图4为本发明中地下目的层逆向逼真照明属性图;
29.图5为本发明中智能变观前后观测系统属性对比图。
具体实施方式
30.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
32.下面通过具体实施例并结合附图对本发明作进一步说明。
33.实施例1:
34.本发明涉及的结合地表和地下双因素的观测系统智能变观方法,包括:
35.(1)根据施工工区的资料成果、地表条件、构造特征、储层类型和地质任务,首先将搜集资料在统一坐标尺下进行网格化,然后利用立方体深度与速度联合的三个方向内插与延拓方法,建立浅中深层三维高精度速度和地质模型,该模型不仅包含地层和速度信息,而且包含近地表、地下构造和储层等信息,是一个包含浅中深层信息的三维高精度混合模型;
36.(2)根据建立的浅中深层三维高精度速度和地质模型,设计规则观测系统,该观测系统能够满足工区施工的地质任务,输出规则观测系统sps文件,设计的规则观测系统示意图如图1所示;
37.(3)根据施工工区的卫星图片、地表高程、野外踏勘照片和近地表低降速带调查结果,将搜集资料在统一比例尺下进行网格化,建立真地表三维构造模型;通过经纬度坐标、低降速带厚度和地表高程真实的反映了地表障碍物的变化情况,同时包含不同位置的吸收衰减特性,实现了由二维平面标量图向三位立体矢量图的转变;在三维立体矢量图中不仅可以标定地表分布的障碍物,而且可以标定地表高陡地形、地下疏松条带、地下空腔和地下巨厚低速区等特殊障碍物;
38.(4)在三维真地表构造模型进行野外施工障碍物的自动识别和圈定,结合障碍物特点及安全施工要求,将圈定的障碍物进行分类,障碍物主要包括:村镇、工厂、河流、公路、养殖场、疏松沉积带、巨厚低速区、井场和高陡山丘等,其中:养殖场、井场、高陡山丘属于i类障碍物;村镇、工厂属于ii类障碍物;公路、河流、疏松沉积带、巨厚低速区属于iii类障碍物;i类障碍物激发点施工可行距离20-30m,ii类障碍物激发点施工可行距离10-15m,iii类障碍物激发点施工可行距离5-8m;激发点施工可行距离是通过理论公式模拟和野外试验数
据分析得到的,在不同地区的激发点施工可行距离是不同的;
39.(5)将观测系统sps文件导入,炮点和检波点投影到真地表三维构造模型中,根据圈定的地表障碍物位置,结合障碍物分类情况,自动选取需要变观的炮点和检波点,设计观测系统在障碍物投影的分布图如图2所示;
40.(6)自动选取需要变观的炮点和检波点方法为,假定炮点或检波点为r&s,同时考虑地表高程的影响,障碍物范围为一多边形区域area,从r&s点向上方或下方垂直方向试射射线,射线与多边形区域area会产生交点数,根据交点个数判断r&s点是否在多边形区域area内;若交点数为奇数或高程突变超出预设阈值,则r&s点在多边形区域area内;若交点数为偶数,则r&s点不在多边形区域area内;遍历搜索所有炮点和检波点,从而得到落入障碍物中的炮检点,并形成无需变观的观测系统sps文件、需要变观的观测系统sps文件;
41.(7)利用自动变观算法,导入需要变观的观测系统sps文件,将选取的炮点和检波点进行移动;在进行炮点移动时,需要考虑激发点施工可行距离,初步标定了可供炮点和检波点选择的多个变观位置,观测系统自动变观后的炮检点分布图如图3所示;
42.(8)读取障碍物范围内的炮检点,根据炮检点落入障碍物的位置,按照从中间到两边、从下到上的原则,确定障碍物内每一个炮检点的移动顺序,然后按照规划的移动顺序,上下交替搜索障碍物之外的可放置空点,将炮检点移动到障碍物外侧;多个障碍物的情况下,障碍物计算顺序从上到下依次进行;在进行炮点移动时,结合三类障碍物的激发点施工可行距离,进行炮点的自动变观,确保施工安全;
43.(9)在三维高精度速度和地质模型中标定目的层位置,目的层可以是浊积岩或砂砾岩体的局部储层,也可以是河流相沉积的全局储层,利用高斯束逆向逼真照明方法,从地下目的层向上照明,在高斯束照明中考虑了地层的吸收衰减和传播路径损失,能够更好地描述地震波传播规律;
44.(10)将可供选择的多个变观位置投影到真地表三维构造模型中,高斯束射线穿过浅中深层三维高精度速度和地质模型,以及真地表三维构造模型,最终射线束到达了地面,根据地面的射线束照明强度来优选最佳的炮点和检波点变观位置,地下目的层逆向逼真照明属性图如图4所示;
45.(11)输出优选后的智能变观炮点和检波点位置信息,并与无需变观的炮点和检波点进行合并,计算观测系统覆覆盖次数、炮道密度、方位角、炮检距均匀分布和成像算子属性图,量化评价自动变观后的观测系统,量化评价公式为:θ=α
×
fold ρ
×
st β
×
zip φ
×
rs λ
×
im,其中:α为覆盖次数权重系数,fold为覆盖次数,ρ为炮道密度权重系数,st为炮道密度,β为方位角权重系数,zip为方位角,φ为炮检距均匀分布权重系数,rs为炮检距均匀分布,λ为成像算子权重系数,im为成像算子,智能变观前后观测系统属性图对比如图5所示;
46.(12)综合定量化考虑观测系统覆盖次数、炮道密度、方位角、炮检距均匀分布和成像算子属性,根据量化评结果,若不满足观测系统施工要求和地质任务,则需要根据量化评价结果调整变观位置、加密炮点或检波点,直到满足规避地表障碍物和地下目的层充分照明的要求,则输出最终的观测系统sps文件,完成了观测系统的智能变观。
47.本发明中的结合地表和地下双因素的观测系统智能变观方法,发挥真地表三维构造模型、浅中深层三维高精度速度和地质模型的优势,从地表和地下两个因素考虑观测系
统变观的不利影响。在有效规避地表障碍物、近地表特殊地质体影响的同时,确保了地下目的层精确成像和储层预测的要求,智能变观后的观测系统为能够保证获取到高品质的原始数据,为后续精细处理和综合解释奠定了基础,在单点高密度地震勘探中具有重要作用。
48.上述具体实施方式仅是本发明的具体个案,本发明的专利保护范围包括但不限于上述具体实施方式的产品形态和式样,任何符合本发明权利要求书且任何所属技术领域的普通技术人员对其所做的适当变化或修饰,皆应落入本发明的专利保护范围。
49.本发明涉及油气田勘探开发技术领域,具体地涉及一种结合地表和地下双因素的观测系统智能变观方法,包括:建立浅中深层三维高精度速度和地质模型,设计规则观测系统;建立真地表三维构造模型,进行障碍物的自动识别和圈定;自动选取需要变观的炮点和检波点,利用自动变观算法,将选取的炮点和检波点进行移动;计算观测系统属性图,量化评价自动变观后的观测系统;根据量化评价结果调整变观位置、加密炮点或检波点,输出最终的观测系统sps文件。本发明从地表和地下两个因素考虑观测系统的变观影响,在有效规避地表障碍物、近地表特殊地质体影响的同时,确保了地下目的层精确成像和储层预测的要求,智能变观后的观测系统能够保证采集到高品质原始数据。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。