1.本发明涉及车式机器人定位及导航,具体的说是基于十字型激光器及单目视觉系统的管道小车导航方法。
背景技术:
2.管道一经安装完成就很难将其拆卸进行离线清洗和维修,由于所研究的管道属于特殊介质传输管道,内部空间狭窄,虽然现有的接触式管道机器人可以进入管道对管道进行作业,但是接触式的处理方法会对特殊管道壁面造成损伤,无法得到有效应用。研究学者经过大量的研究可以采用激光的方法对管道进行非接触式清洗,然而管道小车行走机构容易走偏和管道壁发生碰撞,有大量的学者研究非接触式管道处理方式,利用相机对管道内部信息进行图像处理,但是方形管道几乎没有纹理信息,图像处理无法提取到有效稳定的管道信息而且管道反光较为严重,给相机测量带来极大的困难。
3.现有技术中采用两个激光器和单目相机实现管道车辆的直线行走,但是该方法需要使得两个线激光器的光平面和单目相机的光轴保持平行,安装较为复杂,若平行度较差,采用该方法检测,检测精度较低,容易和管道壁发生碰撞造成损伤。
技术实现要素:
4.针对现有技术中存在的上述不足之处,本发明要解决的技术问题是提供一种基于十字型激光器及单目视觉系统的管道小车导航方法,实现管道小车在管道中直线行走。
5.本发明为实现上述目的所采用的技术方案是:一种基于十字型激光器及单目视觉系统的管道小车导航方法,包括:
6.将视觉传感器安装于管道小车车体的同侧外壁,所述视觉传感器包括十字型激光器投射装置和相机成像装置;
7.当管道小车在管道内沿中轴线方向行走时,十字型激光器投射装置向管道内壁投射激光,相机成像装置实时采集该管道内壁上的激光图像;
8.根据激光图像的变化实时计算管道小车在行进过程中的位置及姿态;
9.获取当前位置及姿态与初始时刻的偏移量;
10.调整偏移量对管道小车行驶轨迹实时纠偏,使得管道小车沿轴线方向直线行走避免在狭窄管道内的碰撞。
11.所述激光图像为十字型激光条在水平和垂直方向上的长度,计算包括:
12.采用图像差分法将采集到的光条图像分割为背景图像和目标图像;
13.在目标图像上利用灰度重心法,得到十字型光条中心点的图像坐标;
14.利用相机内参数以及光平面方程,基于光学三角法测量原理,获取十字型激光条在水平和垂直方向上的长度。
15.所述图像差分法如下:
16.i
laser
(x,y)=i
source
(x,y)-i
back
(x,y)
17.其中,i
laser
(x,y)表示图像分割后的目标激光光条图像,i
source
(x,y)表示投射激光到管道壁上相机采集得到的原始图像,i
back
(x,y)表示没有开启激光器时的背景图像。
18.所述灰度重心法如下:
[0019][0020]
其中,f(u,v)是图像像素坐标为(u,v)的灰度值,ω是目标区域的集合,是激光光条区域的中心坐标。
[0021]
所述相机内参数以及光平面方程的获取包括:
[0022]
对单目相机的内参数进行标定并消除相机的畸变;
[0023]
对十字型激光器进行标定;
[0024]
计算十字型激光器水平和垂直方向在相机坐标系下的光平面方程。
[0025]
所述相机内参数标定和光平面标定,包括以下步骤:
[0026]
将2d平面靶标放置于相机前,十字型激光器激光投射到2d平面靶标上,摆放多个不同姿态,基于2d平面靶标标定算法计算相机的内参数,利用双重焦比不变性和光学三角法,分别求取十字型激光器的横、纵光平面在相机坐标系下的平面方程。
[0027]
所述实时计算管道小车在行进过程中的位置及姿态包括:
[0028]
定义,十字型激光器的发散角为α,十字型激光器投影到管道上纵方向上的长度为m,水平方向上左侧长度为n、右侧长度为s;
[0029]
则,相机和管道中心轴线的偏转角θ为:
[0030][0031]
其中,
[0032]
相机距管道壁的距离l为:
[0033]
l=l*cosθ
[0034]
其中,n与s的长度决定了θ的方向,当n>s时,规定为正,反之n<s时,规定θ为负;当小车中轴线和管道中轴线平行时,垂直和水平方向上的长度相等,即n=s时,此时θ=0记为初始时刻,车体轴线和管道轴线平行。
[0035]
所述偏移量计算包括:
[0036][0037]
其中,δl,δθ分别表示在任意位置处,管道小车距管道壁距离的偏移量和相机与管道中轴线偏转角度偏移量,l0和θ0分别表示管道小车在初始时刻时,相机距管道壁的距离
和相机与管道中心轴线的偏转角;l1和θ1管道小车在管道任意位置处,相机距管道壁的距离和相机与管道中心轴线的偏转角。
[0038]
所述调整偏移量对管道小车实时纠偏,包括:
[0039]
根据偏移量调整管道小车驱动电机的位移指令,利用驱动电机在线反馈实时控制,使得管道小车在有限时间内偏移量δl≈0,δθ≈0,实现管道小车在管道内沿中轴线方向直线行走。
[0040]
本发明具有以下优点及有益效果:
[0041]
1.本发明所述的基于十字型激光器及单目视觉系统的管道小车导航方法采用一个相机和一个十字型结构光进行特殊组合形成视觉传感器系统,成本低。
[0042]
2.本发明所述的基于十字型激光器及单目视觉系统的管道小车导航方法采用直接识别十字激光长度特征的方法对管道小车进行位置确定,具有效率高,算法简单的优势。
[0043]
3.本发明所述的基于十字型激光器及单目视觉系统的管道小车导航方法,采用安全区域内调整管道小车位置和倾角,具有强保护的特点,且反馈快、导航效率高,能够实时控制机器人的运动,具有安全高效的特性。
附图说明
[0044]
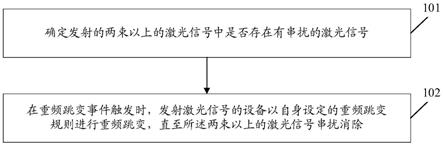
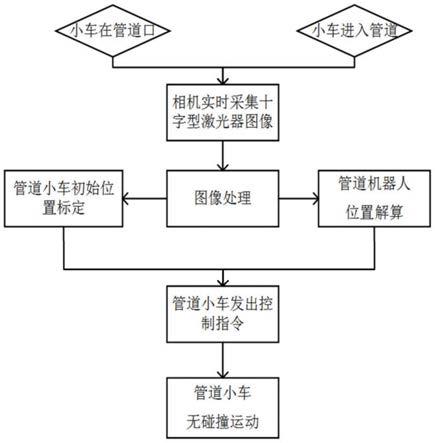
图1为本发明流程图;
[0045]
图2为本发明车体导航示意图;
[0046]
图3为本发明十字激光器在管道侧面的投影示意图。
具体实施方式
[0047]
下面结合附图及实施例对本发明做进一步的详细说明。
[0048]
采用结合单目视觉和十字型结构光的视觉测量技术,通过对导航系统内参和外参数的标定,利用图像处理技术快速提取目标十字的长度信息,进而实现管道小车的位姿测量,利用位姿信息对管道小车的路径进行规划,从而实现机器人的导航控制,该方法实现了管道小车在狭窄管道空间内进行导航,具有快速性、安全性和实时性的特点,能够实现管道小车在管道内的安全运行。
[0049]
参照附图1和2,本发明所述基于十字型激光器及单目视觉系统的管道小车导航方法的具体步骤如下:
[0050]
步骤一:将视觉传感器安装于管道小车的同侧,视觉传感器包括十字型激光器投射装置和相机成像装置。
[0051]
步骤二:对单目相机的内参数进行标定,消除相机的畸变,对十字线激光器进行标定,计算十字型激光器水平和垂直方向在相机坐标系下的光平面方程;
[0052]
将2d平面靶标放置于相机前,十字型激光器激光投射到2d平面靶标上,摆放多个不同姿态,用张正友等人的基于2d平面靶标标定算法可以计算得到相机的内参数,利用双重焦比不变性和光学三角法,分别求取十字型激光器的横、纵光平面在相机坐标系下的平面方程。
[0053]
步骤三:将管道小车的中轴线沿着方形管道近似中心线的位置放置(此时为初始时刻),将十字激光器投射到管道壁上,相机采集投射到管道壁上的原始激光光条图像;
[0054]
步骤四:采用图像差分法将采集到的原始激光光条图像分割为背景图像和目标图像;
[0055]
所述图像差分法表述如下:
[0056]
i
laser
(x,y)=i
source
(x,y)-i
back
(x,y)
[0057]
其中,i
laser
(x,y)表示图像分割后的目标激光光条图像,i
source
(x,y)表示投射激光到管道壁相机采集得到的原始激光光条图像,i
back
(x,y)表示没有开启激光器透射光条时的背景图像。
[0058]
步骤五:在目标激光光条图像上利用灰度重心法,得到十字型光条中心点的图像坐标。
[0059]
灰度重心法表述如下:
[0060][0061]
其中,f(u,v)是图像像素坐标为(u,v)的灰度值,ω是目标区域的集合,是激光光条区域的中心坐标。
[0062]
步骤六:利用步骤二得到的相机内参数以及光平面方程,基于光学三角法测量原理,得到十字型激光器在光平面的水平和垂直方向上的长度(即获取到m、n、s的长度),当小车中轴线和管道中轴线平行时,记为初始时刻,并且此时垂直和水平方向上的长度相等,参考图3初始时刻时m=n s。
[0063]
步骤七:小车沿着管道中轴线方向进行运动时,相机实时采集管道壁上的原始激光光条图像,利用步骤四到步骤六得到十字型激光器在光平面的水平和垂直方向上m、n、s的的实时长度,记为实际值。
[0064]
步骤八:利用实时得到的实际值解算当前小车的位置以及姿态,将该位置和姿态与初始值进行比对,得到管道小车的偏移量,传送到控制系统。
[0065]
所述实际值解算当前小车的位置以及姿态表述如下:
[0066]
十字线激光器的发散角为α,十字线激光器投影到管道上纵方向上的长度为m,横方向上左侧长度为n,横方向上右侧长度为s;
[0067]
相机和管道中心轴线的偏转角θ为:
[0068][0069]
其中,
[0070]
相机距管道壁的距离l为:
[0071]
l=l*cosθ
[0072]
n与s的长度决定了θ的方向,当n>s时,规定为正,反之n<s时,规定θ为负,当n=s
时,θ=0,车体轴线和管道轴线平行。
[0073]
所述偏移量,包括:
[0074][0075]
其中,δl,δθ分别表示在任意位置处,管道小车距管道壁距离的偏移量和相机与管道中轴线偏转角度偏移量,l0和θ0分别表示管道小车在管道口初始位置处,相机距管道壁的距离和相机与管道中心轴线的偏转角;l1和θ1管道小车在管道任意位置处,相机距管道壁的距离和相机与管道中心轴线的偏转角;
[0076]
步骤九:对管道小车实时纠偏,保证管道小车沿着管道中轴线进行直线行走,避免在狭窄管道内的碰撞。
[0077]
通过视觉传感器得到的偏移量,利用驱动电机在线反馈实时控制,将偏移量作为补偿量,控制驱动电机输出位移指令,使得管道小车在有限时间内偏移量δl≈0,δθ≈0,进而实现管道小车在安全区域内实现直线行走。
[0078]
为了验证本发明的有效性和实用性,使用basler相机,30fps,200w像素的相机,配置8mm的computar镜头,激光器使用0.5mw的十字型激光器,仿真实验使用vs2008结合opencv实现。实验结果显示,本发明可以对处于狭小空间的车体进行导航,车体导航精度可以达到0.5mm,精度高,解决了狭窄管道中管道小车直线行走的问题,有效避免了管道小车对特殊管道造成损伤,影响管道性能。
[0079]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。