1.本发明涉及水利测量技术领域,尤其是涉及一种灌溉支渠流量自动测量装置及其测量方法。
背景技术:
2.灌区量水一直是我国水利量测的重要方面,针对管涵、明渠目前已有多种量水方法,在明渠量水方法中,堰槽法、水位差法、超声法、流速仪垂线法等方法均有其特定的应用场景及适用条件,在对量水精度要求不高,监测断面较少的情况下,以上方法基本可以满足实际需要,然而针对断面宽度较窄的支渠流量测量,尚存在传统方法费时费力、投资大、精度低等缺点,较难满足大量支渠量水需要。
技术实现要素:
3.有鉴于此,本发明旨在提出一种灌溉支渠流量自动测量装置及其测量方法,解决了由于现有技术中缺乏针对断面宽度较窄的支渠流量测量,尚存在传统方法费时费力、投资大、精度低等缺点,较难满足大量支渠量水需要的技术问题。
4.为实现上述目的,本发明提出的其中一个技术方案是:一种灌溉支渠流量自动测量装置,包括外壳和支撑座,所述支撑座固定安装在外壳内部,用于安装内部部件;所述支撑座上设有至少两组滑道,每组滑道均安装有滑块,所述滑块上设有可上下伸展及压缩的叉臂伸缩装置,所述叉臂伸缩装置通过滑块可在滑道上滑动;所述叉臂伸缩装置上沿竖直方向上连接有导杆,用于带动安装在导杆上的载物沿竖直方向上运动;所述导杆上依次设有旋浆流速仪和泥位计。
5.进一步的,可上下伸展及压缩的叉臂伸缩装置通过设置在支撑座上的驱动机构实现的。
6.进一步的,所述驱动机构由固定安装在支撑座顶端的驱动电机、与驱动电机驱动端连接的卷扬轮及一端固定在卷扬轮上且卷腹在卷扬轮上的钢丝绳构成的;所述钢丝绳另一端与所述叉臂伸缩装置下端固定连接。
7.进一步的,所述卷扬轮上连接有电磁制动器,用于锁死或固定住驱动电机转轴。
8.进一步的,还包括有角度传感器,所述电磁制动器通过联轴器与所述角度传感器相连,可与所述卷扬轮同步转动,可实时监测所述叉臂伸缩装置的伸展状态。
9.进一步的,所述支撑座下方侧面还固定有水位传感器。
10.进一步的,还包括有电路板,所述电路板固定在所述支撑座上,电路板是以mcu微控制器为核心的嵌入式系统,用于控制整个灌溉支渠流量自动测量装置的运行。
11.本发明提出的其中另一个技术方案是:一种灌溉支渠流量自动测量方法,其特征在于,包括利用上述的灌溉支渠流量自动测量装置进行的测量步骤:步骤一、mcu从flash中读取站点渠道断面配置参数,包括渠道宽度、边坡系数、渠
底高度、安装高度、流速系数、稳流时间等,根据工作模式选择测量方式;步骤二、读取外围传感器及io口数据,判断当前状态是否满足测量条件,如果满足,则继续下一步,如果不满足,则上传警告信息,并退出测量流程;步骤三、读取水位值,计算当前水位高程;步骤四、控制电机转动,下放叉臂结构,同时实时记录叉臂下放高度;步骤五、当泥位计触发时,停止电机转动,记录当前叉臂下放高度,根据渠底高程计算淤积厚度及水深;步骤六、根据当前水深,计算流速测量位置高度,控制电机带动叉臂运动到目标位置;步骤七、清空流速仪计数值,重新启动流速仪计数,并启动定时器;步骤八、定时时间到,计算流速仪计数值,并根据流速仪参数计算流速值;步骤九、根据分层流速测量参数,确定下一个流速测量位置,并控制电机带动叉臂运动到目标位置;步骤十、当所有分层流速测量完毕,控制电机带动叉臂收回流速仪;步骤十一、mcu根据分层流速值、水深值、渠道宽度、边坡系数等计算断面流量;步骤十二、mcu将计算结果存入存储器,并根据需要将测量结果发送到上位机。
12.本发明的有益效果是:本方案通过集成流速仪、水位仪、泥位计、叉臂式升降结构、嵌入式系统,发明了综合水位、分层流速、淤积等多种要素的自动化渠道断面测量系统,实现了灌溉支渠断面的定点自动分层测量,结合断面流量计算方法,实现了断面流量的全自动测量。实现了窄渠断面流量的精确计量。
附图说明
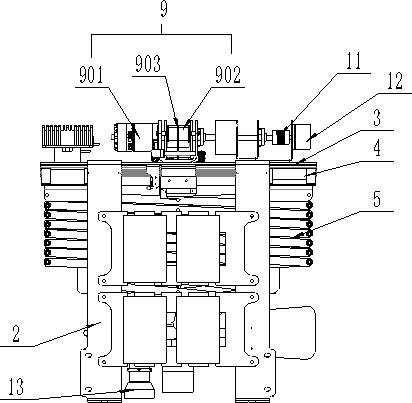
13.图1是本发明灌溉支渠流量自动测量装置的结构示意图;图2是本发明灌溉支渠流量自动测量装置的立体图;图3是本发明灌溉支渠流量自动测量装置的外部结构示意图;图4是本发明灌溉支渠流量自动测量装置安装在测量断面的相对位置关系示意图;图中:1、外壳;2、支撑座;3、滑道;4、滑块;5、叉臂伸缩装置;6、导杆;7、旋浆流速仪;8、泥位计;9、驱动机构;901、驱动电机;902、卷扬轮;903、钢丝绳;10、电磁制动器;11、联轴器;12、角度传感器;13、水位传感器;14、电路板;15、立杆支架;16、太阳能充电装置。
具体实施方式
14.下面结合附图1
‑
4对本发明作进一步详细描述。
15.实施例1如图1和3所示,一种灌溉支渠流量自动测量装置,包括外壳1和支撑座2,所述支撑座2固定安装在外壳1内部,用于安装内部部件;具体的,所述支撑座2上设有至少两组滑道3,每组滑道3均安装有滑块4,所述滑块4上设有可上下伸展及压缩的叉臂伸缩装置5,所述叉臂伸缩装置5通过滑块4可在滑道3上
滑动。
16.具体的,所述叉臂伸缩装置5上沿竖直方向上连接有导杆6,用于带动安装在导杆6上的载物沿竖直方向上运动。
17.具体的,所述导杆6上依次设有旋浆流速仪7和泥位计8。
18.旋桨式流速仪是专用于明渠水流速度测量的仪器。它广泛地应用于水文水资源行业,电力、地质、环保等行业亦有使用。流速仪使用时一般与流速仪信号检测器配套,后者检测前者传来的信号,经过相应的处理、计算后,确定仪器转子的转数与水流速度之间的关 系,从而将机械式触点或干簧式继电器触点产生的信号转变为可以同用户交互的数据,供水文技术工作者确定水流速度和流量。
19.旋桨式流速仪信号检测器的工作原理:从流速仪得到的信号是由机械式触点或干簧式继电器触点产生的开、合信号。检测转换电路将该信号转换为电信号并经滤波、去抖动后变换为单片机可以识别的脉冲序列,送入单片机的 i/o 端口。
20.单片机根据实时检测到的信号周期,进行数字滤波,并记录在规定的测量时间内读取到的信号数,于是,水流速度=水力螺距系统
×
信号总数/测流历时
×ꢀ
转差率+仪器阻力系数,流量=水流速度
×
过水断面。 这两个由计算得到的参数可以通过液晶显示屏实时显示;水力螺距系数、仪器阻力系数、转差率及测量断面的参数可由用户通过小键盘预先设定。
21.进一步的,可上下伸展及压缩的叉臂伸缩装置5通过设置在支撑座2上的驱动机构9实现的。
22.具体的,所述驱动机构9由固定安装在支撑座2顶端的驱动电机901、与驱动电机901驱动端连接的卷扬轮902及一端固定在卷扬轮902上且卷腹在卷扬轮902上的钢丝绳903构成的。
23.具体的,所述钢丝绳903另一端与所述叉臂伸缩装置5下端固定连接。
24.进一步的,所述卷扬轮902上连接有电磁制动器10,用于锁死或固定住驱动电机901转轴,从而实现所述驱动电机901的抱死功能。
25.进一步的,还包括有角度传感器12,所述电磁制动器10通过联轴器11与所述角度传感器12相连,可与所述卷扬轮902同步转动,可实时监测所述叉臂伸缩装置5的伸展状态。
26.具体的工作原理:驱动电机901转动可带动钢丝绳903下端上下运动,所述叉臂伸缩装置5下端可在重力作用下降或在电机转动下上升。叉臂伸缩装置5上端联测分别于滑块4连接,叉臂伸缩装置5上下运动时,叉臂伸缩装置5可实现收缩或展开。当叉臂伸缩装置5收缩到上端时,所述叉臂结构上端触发所述限位开关,从而实现叉臂结构的状态反馈。
27.实施例2进一步的,所述支撑座2下方侧面还固定有水位传感器13。
28.实施例3如图2所示,进一步的,还包括有电路板14,所述电路板14固定在所述支撑座2上,电路板14是以mcu微控制器为核心的嵌入式系统,用于控制整个灌溉支渠流量自动测量装置的运行。
29.实施例4该自动测量装置固定安装在从横跨支渠断面的安装支架上。
30.实施例5该自动测量装置可用与其一并安装的太阳能充电装置16,进行供电。
31.实施例6本发明还涉及一种灌溉支渠流量自动测量方法,包括利用上述灌溉支渠流量自动测量装置进行的测量步骤:步骤一、mcu从flash中读取站点渠道断面配置参数,包括渠道宽度、边坡系数、渠底高度、安装高度、流速系数、稳流时间等,根据工作模式选择测量方式;步骤二、读取外围传感器及io口数据,判断当前状态是否满足测量条件,如果满足,则继续下一步,如果不满足,则上传警告信息,并退出测量流程;步骤三、读取水位值,计算当前水位高程;步骤四、控制电机转动,下放叉臂结构,同时实时记录叉臂下放高度;步骤五、当泥位计触发时,停止电机转动,记录当前叉臂下放高度,根据渠底高程计算淤积厚度及水深;步骤六、根据当前水深,计算流速测量位置高度,控制电机带动叉臂运动到目标位置;步骤七、清空流速仪计数值,重新启动流速仪计数,并启动定时器;步骤八、定时时间到,计算流速仪计数值,并根据流速仪参数计算流速值;步骤九、根据分层流速测量参数,确定下一个流速测量位置,并控制电机带动叉臂运动到目标位置;步骤十、当所有分层流速测量完毕,控制电机带动叉臂收回流速仪;步骤十一、mcu根据分层流速值、水深值、渠道宽度、边坡系数等计算断面流量;步骤十二、mcu将计算结果存入存储器,并根据需要将测量结果发送到上位机。
32.应用时,如图4所示,灌溉支渠流量自动测量装置固定在立杆支架15上,立杆支架15横跨测量断面两岸,太阳能充电装置16在立杆支架的顶部,并通过电缆与灌溉支渠流量自动测量装置相连。
33.灌溉支渠流量自动测量装置接收远程启动信号或本地按钮启动信号启动断面流量自动测量流程。
34.灌溉支渠流量自动测量装置出发启动信号后,mcu从休眠模式唤醒,并控制外围传感器上电,包括水位计、流速仪、显示屏等。
35.接着mcu从flash中读取灌溉支渠流量自动测量装置工作参数,并核实相关参数是否正确。并读取io口状态及传感器数据,判断是否满足启动测量条件。
36.如果不满足启动测量条件,则通过显示屏和通信口显示上传返回信息,提示无法正常启动。
37.若满足启动测量条件,则进入启动测量。
38.mcu首先控制电机运转,将叉臂升到上限位(如叉臂已经到上限位,则省略此步骤),然后连续读取水位仪数据,根据断面参数计算断面水面高度。
39.mcu控制电机下放叉臂,直到下限位动作或泥位计动作。当下限位动作,则证明渠底高度超过叉臂测量范围,收回叉臂,上传无法测量信息,取消测量进程。
40.通过编码器读取叉臂下放距离,并与水位高度一起计算水深。
41.根据水深,计算测点数量和位置,控制电机运动到对应位置。
42.到达预定测量位置后,启动流速测量,通过定时器测量固定时段内旋浆流速仪读数,并计算平均流速。
43.所有测点数量测量完毕后,收回叉臂,并同步根据分层流速计算断面流量。
44.将计算流量存储,并在显示屏显示,同时将测量结果通过通信口发送到上位机或云端。
45.关闭外围设备电源,完成一次断面测量过程。mcu进入到待机状态。
46.以上对本发明的一个实施例进行了详细说明,但内容仅为本发明的较佳实施例,不能被认为用于限定本发明的实施范围。凡依本发明申请范围所作的均等变化与改进等,均应仍归属于本发明的专利涵盖范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。