1.本实用新型属于机器人相关技术领域,具体涉及一种安全防护服务机器人。
背景技术:
2.安防机器人又称安保机器人,是半自主、自主或者在人类完全控制下协助人类完成安全防护工作的机器人,安防机器人作为机器人行业的一个细分领域,立足于实际生产生活需要,用来解决安全隐患、巡逻监控及灾情预警等,从而减少安全事故的发生,减少生命财产损失。
3.现有的技术存在以下问题:1、现有的装置中机械臂在运动中会造成重心升高,导致装置容易失去平衡,2、现有的装置在使用中,机械臂在转动时,容易与连接线缆缠绕。
技术实现要素:
4.本实用新型的目的在于提供一种安全防护服务机器人,以解决上述背景技术中提出的重心升高导致失去平衡以及线缆与机械臂缠绕的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种安全防护服务机器人,包括底板和机械臂装置,所述底板的外围设置有固定架,所述固定架设置有四个,且四个固定架均通过螺丝连接的方式与底板固定连接,所述底板的上端且位于固定架的内侧设置有芯片仓,且芯片仓通过焊接的方式与底板固定连接,所述芯片仓的上端设置有支柱,所述支柱的上端设置有云台,所述云台的上端设置有摄像头,所述摄像头的右侧且位于底板的上端设置有机械臂装置,所述底板的外部且分别位于四个固定架的下端对应的设置有四个滑轮装置,所述底板的底端中部设置有电源仓,所述电源仓的底端中部设置有烟雾警报器装置。
6.优选的,所述机械臂装置包括第一连接臂、第二连接臂、伺服电机、连接件、第三连接臂、活动夹、连接杆和传动齿轮,所述第一连接臂的上端通过转轴连接有第二连接臂,所述第二连接臂的左右两端分别设置有伺服电机,所述第二连接臂的左端通过转轴连接有连接件,所述连接件的左下端设置有伺服电机,所述连接件的左上端设置有第三连接臂,所述第三连接臂的左下端设置有连接杆,所述连接杆的下端且位于连接件的左端设置有活动夹,所述活动夹的右端且位于连接件的左端设置有两个传动齿轮。
7.优选的,所述固定架上设置有若干个穿透小孔结构设置。
8.优选的,所述电源仓通过转动连接的方式与底板的底端中部活动连接。
9.优选的,所述连接件通过转轴连接的方式与第二连接臂可旋转的活动连接,且连接件与第二连接臂的连接处设置有伺服电机,所述伺服电机控制连接件相对第二连接臂上下自由转动。
10.优选的,所述第一连接臂和第二连接臂为扁平结构设计,所述第一连接臂和第二连接臂与伺服电机的位置均相对固定。
11.优选的,所述活动夹通过连接杆与第三连接臂连接,且活动夹的末的两个传动齿轮相互啮合。
12.优选的,所述芯片仓内的电子元件通过线缆连接的方式与机械臂装置中的相应部件连接,且连接所使用的线缆均通过贴合的方式与底板和固定架固定。
13.与现有技术相比,本实用新型提供了一种安全防护服务机器人,具备以下有益效果:
14.1、本实用新型在原有设置上通过中央处理模块处理后发出对应的指令给发送模块,发送模块将指令传出,使得机械臂装置开始对指令做出相应的操作,其中,在接收指令后外部电源与伺服电机导通,伺服电机开始工作,第一连接臂与第二连接臂在伺服电机的驱动之下转动,然后通过连接件与第二连接臂连接的第三连接臂在传动齿轮转动作用下控制通过连接杆与第三连接臂连接的活动夹的张开与闭合,同时在雷达模块与传感器模块的作用下对物品进行定位之后进行捕获以及投放操作,这样的设置有效解决了原有装置中由于机械臂装置在运动中重心较高容易导致装置倾覆的问题。
15.2、本实用新型在原有设置基础上通过电源仓通过转动连接的方式与底板的底端中部活动连接,连接件通过转轴连接的方式与第二连接臂可旋转的活动连接,且连接件与第二连接臂的连接处设置有伺服电机,伺服电机控制连接件相对第二连接臂上下自由转动,第一连接臂和第二连接臂为扁平结构设计,第一连接臂和第二连接臂与伺服电机的位置均相对固定,活动夹通过连接杆与第三连接臂连接,且活动夹的末的两个传动齿轮相互啮合,芯片仓内的电子元件通过线缆连接的方式与机械臂装置中的相应部件连接,且连接所使用的线缆均通过贴合的方式与底板和固定架固定,通过第一连接臂、第二连接臂和第三连接臂均为扁平化且镂空的结构设计,可以简化机器人的结构和节省所占用的空间,同时有利于机器人装置重心的稳定,使得机器人装置在运动中较稳定,且能够有效降低材料的使用成本,且芯片仓与机械臂连接使用的线缆均通过与底板和固定架贴合的方式固定,能够有效防止在机械臂装置转动过程中与连接的线缆缠绕的风险。
附图说明
16.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制,在附图中:
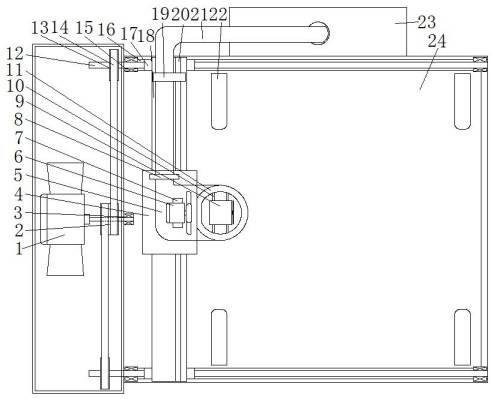
17.图1为本实用新型提出的一种安全防护服务机器人整体结构示意图;
18.图2为本实用新型提出的一种安全防护服务机器人底部结构示意图;
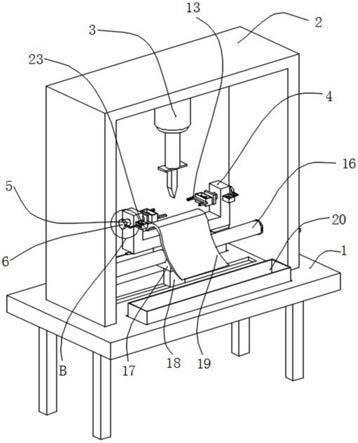
19.图3为本实用新型提出的一种安全防护服务机器人机械臂装置结构示意图;
20.图4为本实用新型提出的一种安全防护服务机器人内部元件工作原理结构示意图;
21.图中:1、固定架;2、支柱;3、滑轮装置;4、机械臂装置;5、摄像头;6、云台;7、芯片仓;8、烟雾警报器装置;9、底板;10、电源仓;41、第一连接臂;42、第二连接臂;43、伺服电机;44、连接件;45、第三连接臂;46、活动夹;47、连接杆;48、传动齿轮。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下
所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1
‑
4,本实用新型提供一种技术方案:一种安全防护服务机器人,包括底板9和机械臂装置4,底板9的外围设置有固定架1,固定架1设置有四个,且四个固定架1均通过螺丝连接的方式与底板9固定连接,底板9的上端且位于固定架1的内侧设置有芯片仓7,且芯片仓7通过焊接的方式与底板9固定连接,芯片仓7的上端设置有支柱2,支柱2的上端设置有云台6,云台6的上端设置有摄像头5,摄像头5的右侧且位于底板9的上端设置有机械臂装置4,底板9的外部且分别位于四个固定架1的下端对应的设置有四个滑轮装置3,底板9的底端中部设置有电源仓10,电源仓10的底端中部设置有烟雾警报器装置8。
24.进一步的,机械臂装置4包括第一连接臂41、第二连接臂42、伺服电机43、连接件44、第三连接臂45、活动夹46、连接杆47和传动齿轮48,第一连接臂41的上端通过转轴连接有第二连接臂42,第二连接臂42的左右两端分别设置有伺服电机43,第二连接臂42的左端通过转轴连接有连接件44,连接件44的左下端设置有伺服电机43,连接件44的左上端设置有第三连接臂45,第三连接臂45的左下端设置有连接杆47,连接杆47的下端且位于连接件44的左端设置有活动夹46,活动夹46的右端且位于连接件44的左端设置有两个传动齿轮48。
25.通过上述技术方案,能够使得机械臂装置能够在芯片仓中各种芯片器件的作用下,依次通过第一连接臂、第二连接臂、以及第三连接臂来实现不同角度以及不同力度的操作,使得装置的精密性更好,有利于装置在一些场合的使用,如帮助行动不便的老人捡拾钥匙等之类的小物件。
26.进一步的,固定架1上设置有若干个穿透小孔结构设置。
27.通过上述技术方案,装置整体结构均为穿透小孔结构设置,能够使得装置的整体重量大大减轻,对于电源能量的需求相对减低,能够使得装置续航增加。
28.进一步的,电源仓10通过转动连接的方式与底板9的底端中部活动连接,连接件44通过转轴连接的方式与第二连接臂42可旋转的活动连接,且连接件44与第二连接臂42的连接处设置有伺服电机43,伺服电机43控制连接件44相对第二连接臂42上下自由转动,第一连接臂41和第二连接臂42为扁平结构设计,第一连接臂41和第二连接臂42与伺服电机43的位置均相对固定,活动夹46通过连接杆47与第三连接臂45连接,且活动夹46的末的两个传动齿轮48相互啮合,芯片仓7内的电子元件通过线缆连接的方式与机械臂装置4中的相应部件连接,且连接所使用的线缆均通过贴合的方式与底板9和固定架1固定。
29.通过上述技术方案,第一连接臂、第二连接臂和第三连接臂均为扁平化且镂空的结构设计,可以简化机器人的结构和节省所占用的空间,同时有利于机器人装置重心的稳定,使得机器人装置在运动中较稳定,且能够有效降低材料的使用成本,且芯片仓与机械臂连接使用的线缆均通过与底板和固定架贴合的方式固定,能够有效防止在机械臂装置转动过程中与连接的线缆缠绕的风险。
30.本实用新型的工作原理及使用流程:本实用新型安装好过后,首先通过装置中芯片仓7内置的相对应的芯片器件烧录进提前准备好的驱动程序,然后设备通电,在位于底板9上方的摄像头5在云台6的作用下可旋转摄像头5来实现全景检测,对老人的生活进行实时的跟随,并判断老人的行动姿势危险性,在内部激光雷达系统的加持下可以提前对老人行进路线附近的路况第一时间做出调整,雷达模块与传感器模块将收集到的周围环境的情况
通过接收模块传递给中央处理模块,再有中央处理模块处理后发出对应的指令给发送模块,发送模块将指令传出,使得机械臂装置4开始对指令做出相应的操作,其中,在接收指令后外部电源与伺服电机43导通,伺服电机43开始工作,第一连接臂41与第二连接臂42在伺服电机43的驱动之下转动,然后通过连接件44与第二连接臂42连接的第三连接臂45在传动齿轮48转动作用下控制通过连接杆47与第三连接臂45连接的活动夹46的张开与闭合,同时在雷达模块与传感器模块的作用下对物品进行定位之后进行捕获以及投放操作,同时传感器模块中还设置有与跟随系统对应的命令,当老人身体的倾斜角度超度设定的初始阈值时,设备会通过芯片仓7中的wifi模块与蓝牙模块传输给后台,同时摄像头5也会将实时景象通过无线通信模块发送给后台,同时,装置会根据提前设置好的指令控制设备通过滑轮装置3快速移动到老人身边,当家中出现火灾发送烟雾或者有毒气体时,防护服务机器人首先通过位于底板9底端的电源仓10下端的烟雾警报器装置8中内置的蜂鸣器发出警报声和通过烟雾传感器以及esp8266wifi模块来驱动滑轮装置3通过电源仓10提供能量在摄像头5作用下快速寻找到窗户,并通过机械臂装置4打开窗户,同时也会立马通过无线通信模块箱消防队报警以及给子女通信,这样的结构设置,使得机械臂在使用过程之中占用空间少,且重量轻,有效解决了原有装置中装置行动中由于重心高不稳定的问题。
31.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。