1.本实用新型涉及仪器仪表检测技术领域,特别是一种协作机器人调度控制系统。
背景技术:
2.在电表检测领域,通常利用协作机器人进行检测。机器人从固定原点开始动作,完成从传送带上取件、转移、检测、分类、复位等动作。现有的检测系统,电表输送区域与检测区域位置匹配不当,容易出现机器人复位不精确现象。特别是当存在多台机器人,并且机器人旋转工作存在相同覆盖区域时,机器人之间因为摆臂转动,容易出现轨迹交叉现象,电表输送区域与检测区域位置匹配不当,更容易出现复位点不精确和摆臂碰撞问题。
技术实现要素:
3.本实用新型目的在于克服以上技术缺陷,提出一种协作机器人调度控制系统。
4.本实用新型为实现其技术目的所采取的技术方案是:一种协作机器人调度控制系统,包括输送平台和机器人调度平台,所述输送平台包括输送架和设置在所述输送架上的传送带,所述传送带分为来料区、合格区、合格下料区,在所述来料区还设有导向板,
5.所述机器人调度平台,包括工作台,在所述工作台一侧设置机器人,另一侧设置检测台,所述检测台包括若干个检测工位和与之通讯连接的显示器;
6.在所述输送平台与机器人调度平台之间还设有不合格区,所述不合格区包括支撑架和设置在所述支撑架上的斜坡导轨,所述斜坡导轨上设有滑轮。
7.优选的,所述传送带包括第一传送带和第二传送带,所述来料区、合格区位于第一传送带上,所述合格下料区位于第二传送带上。
8.优选的,所述导向板倾斜放置在所述来料区上,所述导向板与所述第一传送带的侧边围成喇叭口结构。
9.优选的,所述第一传送带和第二传送带相互平行,并且传送方向相同。
10.优选的,所述检测台下方还设有与之配合的配电箱,用于所述检测台完成电表检测。
11.优选的,所述检测工位包括第一工位、第二工位、第三工位、第四工位,四个检测工位能够同时实现四台电表同时检测。
12.本实用新型的有益效果是:四个检测工位能够同时实现四台电表同时检测,机器人实现抓取电表,以及将检测后电表放置在对应区域。传送带分为来料区、合格区、合格下料区,实现合格电表的有效输送。不合格区包括支撑架和斜坡导轨,斜坡导轨上设有滑轮,可以实现不合格电表在自身重力作用下,沿着斜坡导轨下滑转移。
附图说明
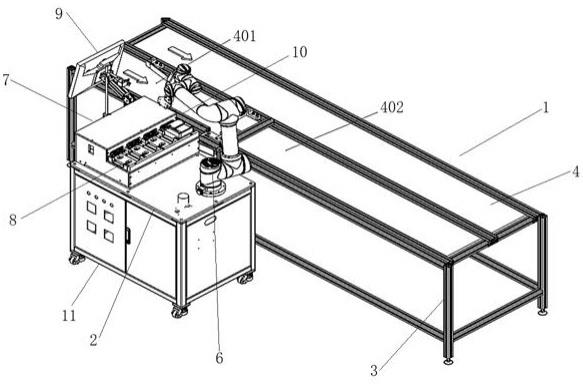
13.图1为本实用新型整体示意图;
14.图2为本实用新型俯视图;
15.图3为本实用新型主视图。
16.图中标记为:1、输送平台;2、机器人调度平台;3、输送架;4、传送带;
17.401、来料区;402、合格区;403、合格下料区;404、导向板;41、第一传送带;
18.42、第二传送带;5、工作台;6、机器人;7、检测台;8、检测工位;81、第一工位;
19.82、第二工位;83、第三工位;84、第四工位;9、显示器;10、不合格区;101、支撑架;102、斜坡导轨;103、滑轮;11、配电箱。
具体实施方式
20.下面结合附图并通过实施例对本实用新型作出进一步详细说明。
21.实施例一
22.如图1
‑
3所示:一种协作机器人调度控制系统,包括输送平台1和机器人调度平台2,所述输送平台1包括输送架3和设置在所述输送架3上的传送带4,所述传送带分为来料区401、合格区402、合格下料区403,在所述来料区401还设有导向板404,导向板404倾斜放置在来料区401上,导向板404与第一传送带41的侧边围成喇叭口结构,引导电表逐一进入检测工位,避免多台电表同时进入检测工位,影响机器人取料。
23.所述机器人调度平台2,包括工作台5,在所述工作台5一侧设置机器人6,另一侧设置检测台7,所述检测台7包括若干个检测工位8和与之通讯连接的显示器9;
24.在所述输送平台1与机器人调度平台2之间还设有不合格区10,所述不合格区10包括支撑架101和设置在所述支撑架101上的斜坡导轨102,所述斜坡导轨102上设有滑轮103。
25.所述传送带4包括第一传送带41和第二传送带42,所述来料区401、合格区402位于第一传送带41上,所述合格下料区403位于第二传送带42上。
26.所述第一传送带41和第二传送带42相互平行,并且传送方向相同。
27.所述检测台7下方还设有与之配合的配电箱11,用于所述检测台7完成电表检测。
28.所述检测工位8包括第一工位81、第二工位82、第三工位83、第四工位84,四个检测工位能够同时实现四台电表同时检测。
29.本实用新型的工作原理及工作过程如下:来料区401在导向板404作用下,引导电表逐一进入检测工位。机器人6通过控制系统,在电表到达检测工位后,抓取电表,机器人6转动,将电表输送到检测工位8,第一工位81、第二工位82、第三工位83、第四工位84,都放置电表后,四个检测工位能够同时实现四台电表同时检测。
30.检测后若发现有不合格品,则由机器人6将不合格电表抓取放置在不合格区10,电表在重力作用下在滑轮103表面滑动,滑轮103转动,使得电表沿着支撑架101上的斜坡导轨102向下滑动。为方便存放不合格品,可在支撑架101外侧放置储存箱,或者是对接输送带,将不合格品转移。
31.检测后若发现有合格品,则由机器人6将合格电表抓取放置在合格区402,电表在第一传送带41作用下向下输送。若是合格区402上电表放置太多,电表输送速度变慢时,可以指令机器人6将合格电表抓取放置在合格下料区403上,由第二传送带42向下输送。
32.检测结果可以通过显示器9时时查看。四个检测工位同时检测四台电表,若是同时发现有合格品和不合格品,可以通过控制系统指令机器人6逐一抓取电表放在对应位置,也可以在工作台5上配备多台机器人6,实现同时取放对应品质电表。
技术特征:
1.一种协作机器人调度控制系统,包括输送平台和机器人调度平台,其特征在于:所述输送平台包括输送架和设置在所述输送架上的传送带,所述传送带分为来料区、合格区、合格下料区,在所述来料区还设有导向板,所述机器人调度平台,包括工作台,在所述工作台一侧设置机器人,另一侧设置检测台,所述检测台包括若干个检测工位和与之通讯连接的显示器;在所述输送平台与机器人调度平台之间还设有不合格区,所述不合格区包括支撑架和设置在所述支撑架上的斜坡导轨,所述斜坡导轨上设有滑轮。2.根据权利要求1所述的协作机器人调度控制系统,其特征在于:所述传送带包括第一传送带和第二传送带,所述来料区、合格区位于第一传送带上,所述合格下料区位于第二传送带上。3.根据权利要求2所述的协作机器人调度控制系统,其特征在于:导向板倾斜放置在所述来料区上,导向板与所述第一传送带的侧边围成喇叭口结构。4.根据权利要求2所述的协作机器人调度控制系统,其特征在于:所述第一传送带和第二传送带相互平行,并且传送方向相同。5.根据权利要求1所述的协作机器人调度控制系统,其特征在于:所述检测台下方还设有与之配合的配电箱,用于所述检测台完成电表检测。6.根据权利要求1所述的协作机器人调度控制系统,其特征在于:所述检测工位包括第一工位、第二工位、第三工位、第四工位,四个检测工位能够同时实现四台电表同时检测。
技术总结
本实用新型公开了一种协作机器人调度控制系统,包括输送平台和机器人调度平台,所述输送平台包括输送架和传送带,传送带分为来料区、合格区、合格下料区,在来料区还设有导向板;所述机器人调度平台包括工作台、机器人,以及检测台,所述检测台包括若干个检测工位和与之通讯连接的显示器;在所述输送平台与机器人调度平台之间还设有不合格区。其优点是:四个检测工位能够同时实现四台电表同时检测,机器人实现抓取电表,以及将检测后电表放置在对应区域。传送带分为来料区、合格区、合格下料区,实现合格电表的有效输送。不合格区包括支撑架和斜坡导轨,斜坡导轨上设有滑轮,可以实现不合格电表在自身重力作用下,沿着斜坡导轨下滑转移。转移。转移。
技术研发人员:柳翔 常兆敏
受保护的技术使用者:青岛乾程科技股份有限公司
技术研发日:2021.06.11
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。