1.本公开总体涉及一种旋转力传递连接器,更具体地,涉及一种用于将旋转力从内窥镜的插入部分传递到可旋转地设置在该插入部分上的螺旋管的无辊子管状连接器(rollerless tubular connector)。
背景技术:
2.通常,插入设备(比如内窥镜)的插入部分插入到例如内腔中。一种已知的插入到内腔中的这种内窥镜是自推进插入设备。
3.在这种旋转自推进插入设备中,提供了被称为螺旋管的旋转圆柱体,在该圆柱体上,螺旋翅片形成在薄壁管上。螺旋管可旋转地设置在内窥镜的插入部分的外周面上。当螺旋管旋转时,螺旋翅片接触内腔的内壁,从而产生推进力。通过该推进力,插入部分在插入方向或移除方向上被推动。
4.常规螺旋管利用两组辊子,以围绕内窥镜的插入部分旋转。第一组辊子由马达驱动,并且在内窥镜插入部分的内部。第二组辊子设置在螺旋管的内部部分上,与第一组辊子接合,并将旋转力从马达和第一组辊子传递到第二组辊子,以旋转螺旋管。防水盖设置在第一和第二组辊子之间并附接到内窥镜插入部分,以保持内窥镜插入部分中的防水状态。这种第二组辊子或者直接设置在螺旋管的内表面上,或者设置在紧固至螺旋管内表面的连接器的内表面上。第二组轴承通常是机械加工的钢滚子轴承,并且需要用于放置其的精密模制的轴承保持环,以及相关的检查和组装成本,这构成了螺旋管的显著总成本,而螺旋管通常是一次性物品。
技术实现要素:
5.因此,提供了一种用于与螺旋管一起使用的管状连接器。该管状连接器包括:外表面;内表面;以及多个凸轮,其在内表面上周向间隔开,以从内表面径向向内突出,多个凸轮在管状连接器的纵向方向上延伸;其中多个凸轮中的每个具有一个或多个凸轮表面,所述一个或多个凸轮表面被构造成接合旋转构件,以旋转螺旋管。
6.多个凸轮可以由与形成管状连接器的其他部分的材料不同的材料形成。
7.至少所述多个凸轮的一个或多个凸轮表面可以构造为涂覆有与形成管状连接器的其他部分的材料不同的材料。
8.至少所述多个凸轮的一个或多个凸轮表面可以构造成由与形成多个凸轮的其他部分的材料不同的材料形成。
9.还提供了一种用于与具有旋转构件的内窥镜插入部分一起使用的螺旋管。该螺旋管包括:管;螺旋翅片,其设置在管的外表面上;以及多个凸轮,其周向间隔开以从管的内表面径向向内突出,多个凸轮在管状连接器的纵向方向上延伸;其中多个凸轮中的每个具有一个或多个凸轮表面,所述一个或多个凸轮表面构造成接合旋转构件,以旋转螺旋管。
10.螺旋管还可以包括具有多个凸轮的管状连接器,管状连接器固定到管的内表面。多个凸轮可以由与形成管状连接器的其他部分的材料不同的材料形成。至少所述多个凸轮的一个或多个凸轮表面可以构造为涂覆有与形成管状连接器的其他部分的材料不同的材料。至少所述多个凸轮的一个或多个凸轮表面可以构造成由与形成多个凸轮的其他部分的材料不同的材料形成。
11.还提供了一种内窥镜系统,包括:具有细长插入部分的内窥镜,该插入部分具有旋转构件;可旋转地设置在插入部分上的螺旋管,螺旋管包括:管;螺旋翅片,其设置在管的外表面上;以及多个凸轮,其周向间隔开以从管的内表面径向向内突出,多个凸轮在管状连接器的纵向方向上延伸;其中多个凸轮中的每个具有一个或多个凸轮表面,所述一个或多个凸轮表面构造成接合旋转构件,以旋转螺旋管。
12.内窥镜系统还可以包括具有多个凸轮的管状连接器,管状连接器固定到管的内表面。多个凸轮可以由与形成管状连接器的其他部分的材料不同的材料形成。至少所述多个凸轮的一个或多个凸轮表面可以构造为涂覆有与形成管状连接器的其他部分的材料不同的材料。至少所述多个凸轮的一个或多个凸轮表面可以构造成由与形成多个凸轮的其他部分的材料不同的材料形成。
附图说明
13.当参考附图阅读以下详细描述时,本发明的这些及其他特征、方面和优点将变得更好理解,在所有附图中,相同的字符表示相同的部件,其中:
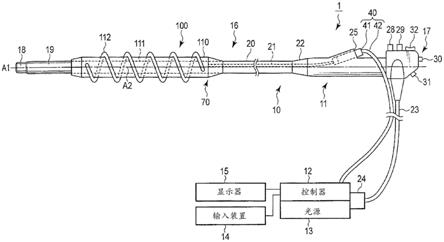
14.图1示意性地示出了内窥镜系统,其具有可旋转地设置在内窥镜的插入部分上的螺旋管。
15.图2示出了图1所示的内窥镜的操作部分的侧表面。
16.图3示出了包括用于将旋转力从插入部分传递到螺旋管的连接器的在纵向轴线方向上的横截面。
17.图4示出了沿着图3中的线a
‑
a截取的横截面图。
18.图5示出了在图1的螺旋管的内表面上使用的连接器。
19.图6a示出了图4的凸轮表面的其他实施例
20.图6b示出了图4的凸轮表面的其他实施例。
具体实施方式
21.虽然所公开的实施例特别适用于将旋转力从插入部分传递到可旋转地设置在内窥镜的插入部分上的螺旋管,并且将在下面参照这些实施例进行描述,但本文公开的设备和方法并不局限于此,而是适用于其他类型的管状连接器,用于通过管状连接器将旋转力从一个构件传递到另一个构件。
22.图1示意性地示出了内窥镜设备1,其包括内窥镜系统10,该内窥镜系统10包括内窥镜11和可旋转地设置在内窥镜11的插入部分16上的螺旋管100。内窥镜11插入到插入对象(例如诸如大肠和小肠这样的蛇形肠道)中。螺旋管100辅助内窥镜11插入到插入对象中。内窥镜系统10包括内窥镜11、控制器12、光源13、输入装置14和显示器15。
23.内窥镜11包括插入到内腔中的插入部分16和设置在插入部分16的近端侧的操作
部分17。插入部分16在内窥镜的远端侧是细长的管状主体,并且在纵向轴线方向上延伸。插入部分16包括远端刚性部分18、设置在远端刚性部分18的近端侧的弯曲部分19以及设置在弯曲部分19的近端侧的柔性管部分20。未示出的照明光学系统、观察系统和图像传感器等包含在在远端刚性部分18中。通过用户控制操作部分17,弯曲部分19沿期望的方向弯曲。柔性管部分20自由弯曲,例如沿着插入部分16所插入的内腔内的弯曲形状弯曲。此外,通道21在插入部分16的内部延伸,用于将驱动轴51从中插入通过,如下所述。
24.操作部分17通过止动件22连接到柔性管部分20。光纤(其远端连接到远端刚性部分18的照明光学系统)和电缆(其远端连接到远端刚性部分18的图像传感器)等延伸穿过插入部分16的内部到达操作部分17。这些光纤和电缆容纳在从操作部分17的近端侧延伸的通用线缆23中。窥视镜连接器24设置在通用线缆23的近端。通用线缆23经由窥视镜连接器24连接到控制器12和光源13。操作部分17还设置有与插入部分16内部的通道21连通的驱动源附接端口25。
25.控制器12电连接到内窥镜11、光源13、输入装置14和显示器15。控制器12控制内窥镜11和与其连接的外围设备(例如光源13和稍后解释的驱动源40)的操作。控制器12还包括图像处理器(未示出)。光源13经由光纤向布置在远端刚性部分18中的照明光学系统提供照明光。用户使用输入装置14向内窥镜11等输入各种指令。显示器15显示由远端刚性部分18的图像传感器获得并由控制器12处理的图像以及内窥镜的操作信息等。
26.图2示出了内窥镜11的操作部分17的与图1所示侧相反的一侧的侧表面。操作部分17包括与在插入部分16内部延伸的治疗工具通道(未示出)连通的治疗工具插入端口26。治疗工具插入端口26与图1所示的驱动源附接端口25并排布置。诸如超声波探头或活检钳这样的治疗工具被插入治疗工具插入端口26中。
27.如图2所示,弯曲操作旋钮27设置在操作部分17的侧表面上,用于沿期望方向弯曲弯曲部分19的操作被输入到该弯曲操作旋钮27。在操作部分17的内部,用于弯曲弯曲部分19的弯曲丝(未示出)的近端连接到与弯曲操作旋钮27连接的轴。弯曲丝的远端连接到弯曲部分19的远端部分。当用户旋转弯曲操作旋钮27时,连接至其的弯曲丝被拉动并导致弯曲部分19弯曲。
28.操作部分17设置有各种开关28、29、30和31,比如供气/供水开关、抽吸开关、拍摄开关和用于切换其他预定功能的转换开关。此外,操作部分17设置有旋转操作输入开关32,以向控制器12输出用于围绕插入部分16的中心轴线a1旋转螺旋管100的信号。当用户例如按压由附图标记32a指示的位置时,旋转操作输入开关32输出用于使螺旋管100沿第一方向(例如顺时针方向)旋转的信号,并且当按压由附图标记32b指示的位置时,向控制单元12输出用于使螺旋管100沿与第一方向相反的第二方向(例如逆时针方向)旋转的信号。
29.再次参照图1,驱动源40附接在驱动源附接端口25上,用于使螺旋管100围绕中心轴线a1旋转和驱动。驱动源40包括具有旋转轴的马达主体41和从马达主体41延伸的马达电缆42。马达主体41的外周通过保持环(未示出)保持在驱动源附接端口25上。马达主体41的旋转轴连接到下面说明的驱动轴51。马达电缆42的近端电连接到控制器12。
30.在下面参照图1对螺旋管100将进行说明。螺旋管100包括圆柱形管主体110。管主体110是可拆卸地附接在插入部分16的外周上的一次性管。管主体110沿着纵向轴线a2延伸。当管主体110附接到插入部分16时,纵向轴线a2与上述旋转中心轴线a1同轴。管主体110
设置有内腔111,插入部分16可以穿过内腔111在整个长度上插入。
31.管主体110是由树脂材料(比如聚氨酯)形成的柔性管。螺旋翅片112形成在管主体110的外周的至少一部分上,从近端方向,该螺旋翅片112看呈顺时针螺旋设置。螺旋翅片112通过粘合或焊接等固定到管主体110,或者与管主体110一体形成,并且从管主体110的外周沿径向方向突出。由例如聚氨酯、tpe、硅等形成螺旋翅片112。
32.下面将参照图3,针对驱动力传递机构70,对螺旋管100的管主体110与插入部分16(柔性管部分20)的附接进行说明,图3示出了包括用于在纵向轴线方向上旋转和驱动螺旋管100的管主体110的驱动力传递机构70的横截面。图4是沿着图3中的线a
‑
a截取的横截面图。如图3所示,柔性管部分20具有第一柔性管部分20a和比第一柔性管部分20a更靠近柔性管部分20的近端侧的第二柔性管部分20b。第一柔性管部分20a和第二柔性管部分20b通过布置在二者之间的刚性基部33连接。在插入部分16处,在基部33中形成腔34。
33.止动件构件35设置在基部33的外周上。接收表面36形成在止动件构件35上,管主体110的近端部分抵靠该接收表面36。这防止当管主体110附接到插入部分16时管主体110向近端侧移动。此外,在基部33的外周上设置有环形接合构件37,其上形成有环形凹槽38。在管主体110上设置有与凹槽38接合的卡爪113。当管主体110附接到插入部分16时,通过将凹槽38与卡爪113接合,管主体110在纵向方向上的运动被调节。
34.在内窥镜11的插入部分16上设置有柔性驱动轴51、旋转齿轮52、内齿轮53和具有圆周表面的内辊子54(旋转构件)。在图4中,示出了六个内辊子54。然而,辊子的数量不限于六个。
35.如图1所示,驱动轴51的近端连接到马达主体41的旋转轴。驱动轴51布置在通道21上,通道21在插入部分16内部延伸。驱动轴51例如由将通过编织金属丝而获得的多层叠加成圆柱网状而获得,或者由通过叠加右卷绕线材和左卷绕线材而获得的多层丝线形成,并且相对于马达主体41具有旋转流动性。
36.旋转齿轮52设置在驱动轴51的远端。旋转齿轮52布置在基部33的腔34中,并且具有分别经由支撑构件55附接到驱动轴51的近端侧和附接到基部33的远端侧。当围绕纵向轴线的旋转力施加到驱动轴51的近端时,驱动轴51旋转该旋转齿轮52。在旋转齿轮52的外周上布置有内齿轮53,其覆盖基部33并附接到基部33的外周。旋转齿轮52的外齿与内齿轮53的内齿啮合。内齿轮53可相对于基部33围绕作为绕转轴线的纵向轴线旋转。内辊子54的轴56附接在内齿轮53上。
37.当来自驱动源40的马达主体41的驱动力被传递到驱动轴51时,旋转齿轮52旋转,并且与旋转齿轮52啮合的内齿轮53在圆周方向上旋转(绕转)。当内齿轮53沿圆周方向旋转时,内辊子54沿圆周方向旋转(绕转)。
38.在插入部分16的外周上,内齿轮53和内辊子54被覆盖物60覆盖,覆盖物60是具有柔性的盖构件,比如由橡胶形成。换句话说,覆盖物60围绕其轴线形成为圆柱形。覆盖物60通过盖固定构件61在纵向轴线方向上的两端固定(例如通过线缠绕粘合(thread winding adhesion))到基部33。覆盖物60是防水盖构件,其提供用于保护内齿轮53、内辊子54和布置在插入部分16内部的其他构件免受外部环境影响的屏障或密封(防止来自体腔内部的液体、水或其他液体侵入),并且构成插入部分16的外罩。覆盖物60允许保持内窥镜11的插入部分16的内部水密。
39.在覆盖物60的径向方向外侧布置有凸轮114,其对应于每个内辊子54并且各自接合相应的内辊子54以构造驱动力传递机构70。凸轮114设置与插入部分16的外周附接的管主体110的内周上。凸轮114可以一体地形成在管主体的内径上,或者如图5所示,形成在固定到管主体110的内径的管状连接器200上,比如通过超声波焊接、粘合、干涉配合等。管状连接器200和与之附接的螺旋管100装配在插入部分16上,如图1所示。
40.如图5所示,连接器200包括外表面202,其通过本领域已知的方法固定到螺旋管100的内部,比如超声波焊接、粘合和干涉配合。连接器200还包括内孔204,其具有从孔204径向向内突出的凸轮114。凸轮114的数量与内辊子54的数量相匹配。凸轮114具有凸轮表面114a、114b,用于与内辊子54接合。在螺旋管的顺时针旋转方向上,凸轮表面114a、114b中的一个与内辊子54接合,而在螺旋管的逆时针旋转方向上,凸轮表面114a、114b中的另一个与内辊子54接合。
41.凸轮114可以与连接器200的壁206一体形成,或者与其分开形成并插入形成在壁206中的相应狭槽208中。这种单独形成的凸轮114可以通过本领域已知的任何方法固定在狭槽208中,比如通过嵌件成型、超声波焊接、粘合或干涉配合。
42.在图4中,六个内辊子54和六个凸轮114以大致相等的间隔布置在孔204的圆周上,并且是这样的状态:一个内辊子54与一个对应的凸轮114接触,覆盖物60介于其间,如图4所示。换句话说,覆盖物60的内周与内辊子54接触,覆盖物60的外周与凸轮114接触。
43.当驱动源40被驱动时,驱动力经由驱动轴51、旋转齿轮52和内齿轮53从驱动源40传递,从而使内辊子54围绕旋转轴a1(绕转轴线)旋转(绕转)。当凸轮114在覆盖物60上滑动时,内辊子54在覆盖物60上滚动(旋转)。由于覆盖物60通过盖固定构件61固定到基部33,覆盖物60不相对于插入部分16旋转。然而,内齿轮53从内辊子54的旋转运动通过覆盖物60传递到与内辊子54邻接的相应凸轮114。因此,来自驱动源40的驱动力从驱动力传递机构70(驱动轴51、旋转齿轮52、内齿轮53、内辊子54、覆盖物60和凸轮114)传递到螺旋管100,螺旋管100围绕旋转轴线a1旋转并被驱动。例如,当观察诸如小肠或大肠这样的弯曲器官时,螺旋管100前进,同时将与旋转管主体110的螺旋翅片112邻接的肠壁推向插入部分16的近端侧,并帮助插入部分16随弯曲器官深入插入。
44.以这种方式,内窥镜设备1设置有驱动力传递机构70,用于使附接到插入部分16的外周的螺旋管100围绕插入部分16的轴线旋转。驱动力传递机构70包括第一部分(内辊子54,或者内辊子54的轴56的轴承部分),其连接到驱动源40并且通过来自驱动源40的驱动力围绕预定轴线(这里是插入部分16的纵向轴线)在圆周方向上移动。驱动力传递机构70还包括第二部分(凸轮114),其能够围绕预定轴线在圆周方向上移动,并且当第一部分移动时,通过与第一部分接触而在预定轴向方向上移动。覆盖物60布置在第一部分和第二部分之间。
45.凸轮114的材料应该选择成使驱动源40上的摩擦阻力最小,并使操作力传递机构70所需的扭矩最小。为了最小化凸轮114在使用过程中的磨损,以及内窥镜的覆盖物60上的累积磨损,可以为凸轮114选择材料以最小化摩擦和磨损特性。然而,不必针对所选材料还考虑机械完整性和组装。例如,可以选择来自含氟聚合物组或低摩擦聚酯组的材料。这种材料比如hdpe可以平衡凸轮114以及螺旋管100或连接器200的其他部分的所有上述要求。在一构造中,螺旋管100可以由ldpe形成,而连接器200可以由hdpe形成,这使得连接器200能
够超声焊接到螺旋管100。这种材料还提供了合适的卡爪113接合,用于将螺旋管100和连接器200锁定到内窥镜的凹槽38。
46.螺旋管100或连接器200的一体凸轮114可被模制,并消除常规机加工的钢滚子轴承、精密模制的轴承保持环以及零件检查和组装时间的成本。此外,传递效率与常规轴承设计相当,并且如上所述,导致部件、组装和检查成本的大幅降低。
47.如以上关于图5讨论,外凸轮114可以与连接器200的壁206分开形成,壁206可以是与连接器200的材料不同的材料。可替代地,如图6a所示,只有与覆盖物60接触的内凸轮114的凸轮表面114a、114b可以采用具有较低摩擦和/或较大磨损特性的另一种材料114c、114d,而对螺旋管100或连接器200的其他部分的要求可以最大化,比如采用较便宜的材料、更容易制造的公差和/或材料和/或更坚固的材料。螺旋管100或连接器200在锁定构造中需要刚性,比如在卡爪113处,以确保在拉伸载荷下螺旋管100保持在插入部分的配合凹槽38上。在这种情况下,可以使用诸如高强度工程聚合物或增强聚合物的材料。然而,这种材料往往具有螺旋管100或连接器200上的凸轮114所需的差摩擦特性。
48.用于凸轮114或者如图6a所示仅用于凸轮表面114a、114b的具有较低摩擦和/或较大磨损的材料可以具有同一凸轮114的其他部分不同的不同材料114c、114d。这种材料可以选自含氟聚合物组或低摩擦聚酯组,并且可以通过本领域已知的任何方法在凸轮114的凸轮表面114a、114b处形成,比如两次注射或嵌件成型过程,以将凸轮114和/或凸轮表面114a、114b与螺旋管100或连接器200的其余部分区分开,从而能够在摩擦点处形成优选的材料,同时保持其他部分所需的材料。用于凸轮表面114a、114b的不同材料114c、114d也可以卡扣就位、超声焊接或以干涉配合挤压。
49.此外,如图6b所示,表面纹理和/或图案210可被添加到凸轮表面114a、114b,以在凸轮表面和覆盖物60之间保持润滑剂膜。这可以通过常规的模具抛光技术或模制后压花来实现。这种表面纹理和/或图案210可以用在上述插入件上,或者用在与螺旋管100或连接器200的其余部分一体形成的凸轮114的凸轮表面材料114c、114d上。
50.在另一实施例中,凸轮表面114a、114b可以是多孔的,并注入水溶性润滑剂,以便在使用时暴露于水期间避开。举例来说,这种多孔性可以通过增材制造方法产生。
51.虽然已经示出和描述了被认为是优选的实施例,但当然应当理解,在不脱离本发明的精神的情况下,可以容易地在形式或细节上进行各种修改和变化。因此,本发明并不局限于所描述和示出的确切形式,而是应该构造成覆盖可能落入所附权利要求范围内的所有修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。