1.本发明涉及牙齿图像匹配装置及方法,尤其是,涉及能够以较高的准确度及高速匹配牙齿图像的牙齿图像匹配装置及其方法。
背景技术:
2.在计算机视觉中从不同的时间或角度拍摄一个场景或物体时,会获得相互不同坐标系的图像。图像匹配是指对这些相互不同的图像进行变形以显示在一个坐标系中的处理。
3.通过如此的图像匹配可确认通过相互不同的测量方式获取的图像的对应关系。
4.在牙科手术引导(surgical guide)软件中在进入牙齿种植(dental implant)计划步骤之前通常会经过ct(computed tomography)图像数据和口腔扫描(oral scan)图像数据之间的图像匹配过程。
5.经过这种图像匹配过程匹配的图像是掌握骨组织和神经管位置等以决定安全且最佳的牙齿种植位置的牙齿种植计划工作的基础,因此图像匹配的准确性在执行这之后的步骤上具有非常重要的意义。
6.以往的医疗软件提供的图像匹配方法是由使用人员手动输入成为匹配图像的基准的点,并以此为基础匹配图像。根据如此以往的图像匹配方法,是由使用人员用眼睛大致判断并且选择基准点,因此结果非常不准确,在匹配图像之后必然伴随着使用人员的手动操作过程。即,使用人员改变点的位置或者再选择点来修改匹配结果。如此,根据以往技术,因为持续反复进行匹配及修改的过程,使用人员在匹配图像上花费大量的时间,出现无法获得与花费的时间相应的满足的结果的问题。
7.作为另一种现有方法,可以有获取包括用于用作口腔内匹配基准的标记的图像,并且以图像内标记为准匹配从不同图像拍摄装置获取的图像的方法,但是这需要以在获取图像时在患者口腔内执行用于匹配的标记的过程为前提,因此存在麻烦且给患者也带来不便的问题。
8.如此以往的方法是比较图像中的所有顶点之间的距离来匹配图像,因此降低图像匹配速度,不仅如此还存在用于比较顶点间距离的系统负载增加的问题。
9.从而,要求在没有利用单独的标记或者手动操作的麻烦的情况下可自动执行高速及高准确度地匹配图像的方案。
10.另外,以往的方法包括很多不必要的噪声成分,诸如牙龈区域,因此存在降低图像匹配准确度的问题。
技术实现要素:
11.所要解决的技术问题
12.本发明的目的在于提供一种提高图像匹配速度并且可将系统负载最小化的牙齿图像匹配装置及方法。
13.另外,本发明目的在于提供一种如下的牙齿图像匹配装置及方法:以高准确度自动执行图像匹配,提高使用人员的便利性,伴随着缩短种植计划所需的时间及可提高种植计划的准确度。
14.解决问题的技术方案
15.为了解决上述问题,本发明提供一种牙齿图像匹配装置,包括:最大外廓检测部,检测在第一牙齿图像数据中作为牙列的最大外廓区域的第一最大外廓区域,以及检测在第二牙齿图像数据中作为牙列的最大外廓区域的第二最大外廓区域;及图像匹配部,以内切于第一最大外廓区域的第一内切圆及内切于第二最大外廓区域的第二内切圆为基础匹配第一及第二牙齿图像数据或者以第一最大外廓区域的第一中心点及第二最大外廓区域的第二中心点为基础匹配第一及第二牙齿图像数据。
16.另外,本发明的牙齿图像匹配装置还包括:内切圆检测部,检测内切于第一最大外廓区域的第一内切圆,以及检测内切于第二最大外廓区域的第二内切圆;及内切球检测部,检测作为第一内切圆的旋转体的第一内切球,以及检测作为第二内切圆的旋转体的第二内切球;其中,图像匹配部以第一及第二内切球为准匹配第一及第二牙齿图像数据。
17.另外,本发明的牙齿图像匹配装置还包括中心点检测部,中心点检测部检测第一最大外廓区域的第一中心点,以及检测第二最大外廓区域的第二中心点;图像匹配部以第一及第二中心点为准匹配第一及第二牙齿图像数据。
18.在此,图像匹配部比较第一内切球中的第一顶点和第二内切球中的第二顶点之间的距离来匹配第一及第二牙齿图像数据。
19.另外,图像匹配部比较第一最大外廓区域中的第一顶点和第二最大外廓区域中的第二顶点之间的距离来匹配第一及第二牙齿图像数据。
20.另外,图像匹配部反复匹配第一及第二牙齿图像数据,直到第一及第二顶点之间的所有距离之和在标准值以下。
21.另外,图像匹配部将第一及第二牙齿图像数据的匹配反复标准次数左右。
22.另外,本发明的牙齿图像匹配装置还包括预处理部,预处理部使第一及第二牙齿图像数据的分辨率一致,并且将第一及第二牙齿图像数据的体素信息转换为顶点信息。
23.另外,最大外廓检测部检测第一及第二最大外廓区域为各个角落与最突出的牙齿接触的多边形形状。
24.另外,内切圆检测部检测分别接触于构成第一及第二最大外廓区域的左右侧上端角落的两边并且具有第一半径的两个圆及接触于在两个圆之间将第一及第二最大外廓区域二等分的二等分线与构成第一及第二最大外廓区域下端的边相接的点并且具有第一半径的一个圆为第一及第二内切圆。
25.另外,中心点检测部利用第一顶点的x轴、y轴及z轴坐标的平均值检测第一中心点,利用第二顶点的x轴、y轴及z轴坐标的平均值检测第二中心点。
26.另外,最大外廓检测部在第一及第二牙齿图像数据中利用以x轴、y轴及z轴为准具有最小位置值及最大位置值的顶点检测第一及第二最大外廓区域。
27.另外,本发明的牙齿图像匹配方法包括如下的步骤:检测在第一牙齿图像数据中作为牙列的最大外廓区域的第一最大外廓区域;检测在第二牙齿图像数据中作为牙列的最大外廓区域的第二最大外廓区域;及以内切于第一最大外廓区域的第一内切圆及内切于第
二最大外廓区域的第二内切圆为基础匹配第一及第二牙齿图像数据,或者以第一最大外廓区域的第一中心点及第二最大外廓区域的第二中心点为基础匹配第一及第二牙齿图像数据。
28.在此,在第一及第二牙齿图像数据匹配步骤包括如下的步骤:分别检测分别内切于第一及第二最大外廓区域的第一及第二内切圆;分别检测作为第一及第二内切圆的旋转体的第一及第二内切球;及以第一及第二内切球为准匹配第一及第二牙齿图像数据。
29.另外,第一及第二牙齿图像数据匹配步骤包括如下的步骤:分别检测第一及第二最大外廓区域的第一及第二中心点;以第一及第二中心点为准匹配第一及第二牙齿图像数据。
30.发明效果
31.根据本发明,只比较第一及第二牙齿图像数据的内切球中的顶点之间的距离或者第一及第二牙齿图像数据的最大外廓区域中的顶点之间的距离来匹配图像,因此相比于比较第一及第二牙齿图像数据中的所有顶点之间的距离来匹配图像,可提高图像匹配速度,不仅如此具有可将用于比较顶点之间的距离的系统的负载最小化的效果。
32.另外,根据本发明,具有如下的效果:以高准确度自动执行图像匹配来提高使用人员的便利性,伴随着缩短种植计划所需的时间及提高种植计划的准确度。
33.在本发明中可得到的效果不限于在以上提及的效果,对于未提及的其他效果本发明所属技术领域中具有常规知识的人可从以下的记载中明确理解。
附图说明
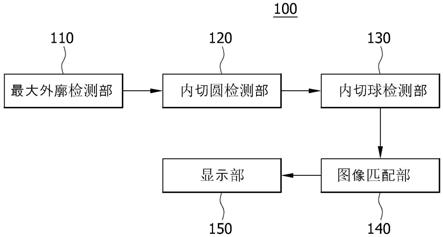
34.图1是本发明的第一实施例的牙齿图像匹配装置的框图。
35.图2及图3是用于说明作为本发明的第一实施例在牙列所有牙齿齐全的情况下在牙齿图像数据中检测最大外廓区域的方法的图。
36.图4及图5是用于说明作为本发明的第一实施例在牙列没有一部分牙齿的情况下在牙齿图像中检测最大外廓区域的方法的图。
37.图6及图7是用于说明作为本发明的第一实施例在牙列所有牙齿齐全的情况下在最大外廓区域中检测内切圆的方法的图。
38.图8及图9是用于说明作为本发明的第一实施例在牙列没有一部分牙齿的情况下在最大外廓区域中检测内切圆的方法的图。
39.图10是用于说明本发明的第一实施例的图像匹配部匹配第一及第二牙齿图像数据的方法的图。
40.图11是本发明的第一实施例的牙齿图像匹配方法的流程图。
41.图12是本发明的第二实施例的牙齿图像匹配装置的框图。
42.图13及图14是作为本发明的第二实施例在二维牙齿图像数据中检测最大外廓区域及中心点的方法的图。
43.图15及图16是用于说明作为本发明的第二实施例在三维牙齿图像数据中检测最大外廓区域及中心点的方法的图。
44.图17是用于说明本发明的第二实施例的图像匹配部匹配第一及第二牙齿图像数据的方法的图。
45.图18是本发明的第二实施例的牙齿图像匹配方法的流程图。
具体实施方式
46.以下,参照附图详细说明本发明的实施例。此时,在附图中应注意相同的构件应尽可能用相同的附图标记表示。然后,对于可使本发明的要点不清楚的公知功能及结构可省略其详细说明。
47.在本发明的实施例中,各个构件可由一个或者一个以上的下级构件构成,在各个构件执行的电气、电子及机械性功能可由电子电路、集成电路及asic(application specific integrated circuit)等公知的各种器件或者机械性构件实现,也可分别个别实现或者将两个以上结合成一个来实现。
48.(第一实施例)
49.图1是本发明的第一实施例的牙齿图像匹配装置的框图。
50.如图1所示,本发明的第一实施例的牙齿图像匹配装置100可包括:最大外廓检测部110、内切圆检测部120、内切球检测部130及图像匹配部140。
51.本发明的第一实施例的牙齿图像匹配装置100匹配第一牙齿图像数据和第二牙齿图像数据。
52.在此,第一牙齿图像数据及第二牙齿图像数据作为因为通过相互不同的图像拍摄装置获取或者在相互不同的时间点获取等的原因而具有相互不同的坐标系或者分辨率的图像数据,分别可以是ct(computed tomography)图像数据、口腔扫描(oral scan)图像数据及磁共振图像(magnetic resonance image;mri)数据中的一种。
53.另一方面,虽未在附图示出,但是本发明的实施例的牙齿图像匹配装置100还可包括方向对准部(未示出)及预处理部(未示出)。
54.在此,方向对准部(未示出)在匹配图像之前对齐第一牙齿图像数据及第二牙齿图像数据,以使第一牙齿图像数据及第二牙齿图像数据朝向相同的方向。
55.然后,预处理部(未示出)使在第一牙齿图像数据及第二牙齿图像数据的卷空间表示物体的单位距离相同,进而可使第一牙齿图像数据及第二牙齿图像数据的分辨率一致。然后,利用移动立方体算法(marching cube algorithm)将第一牙齿图像数据及第二牙齿图像数据的体素(voxel)信息转换为顶点(vertex)信息。
56.在此,移动立方体算法作为用于在三维图像数据中提取等值面(isosurface)的算法,是在该图像技术领域广泛使用的算法,因此省略详细说明。
57.图2及图3是用于说明作为本发明的第一实施例在牙列所有牙齿齐全的情况下在牙齿图像数据中检测最大外廓区域的方法的图;图4及图5是用于说明作为本发明的第一实施例在牙列没有一部分牙齿的情况下在牙齿图像中检测最大外廓区域的方法的图。
58.参照图2及图4,最大外廓检测部110检测在第一牙齿图像数据中作为牙列的最大外廓区域的第一最大外廓区域a1。然后,参照图3及图5,检测在第二牙齿图像数据中作为牙列的最大外廓区域的第二最大外廓区域a2。
59.在此,最大外廓区域a1、a2采用可将牙列内所有牙齿全部容纳的图形的形状,同时可定义为设定成使图形的各个角落与向该角落方向最突出牙齿部分接触的区域。即,最大外廓检测部110可检测第一及第二最大外廓区域a1、a2为各个角落与最突出的牙齿接触的
多边形形状。
60.例如,如图2及图3所示,在牙列所有牙齿齐全且整齐排列的状态下,可检测出第一及第二最大外廓区域a1、a2为直角四边形;如图4及图5所示,在牙列没有一部分牙齿(例如,臼齿)的情况下,可检测出第一及第二最大外廓区域a1、a2为梯形状。
61.最大外廓检测部110除了x轴及y轴的二维上以外,还包括在牙冠长度内作为z轴坐标的深度坐标,在三维上可检测第一及第二最大外廓区域a1、a2。
62.最大外廓检测部110执行在第一及第二牙齿图像数据中分析结构及形状以及通过基于灰度的算法的图像分析处理,区分牙齿区域和除此以外的区域,例如,牙龈等的软组织和骨组织,进而在没有包括其他区域的情况下可在牙齿区域内检测第一及第二最大外廓区域a1、a2。
63.在此,最大外廓检测部110在第一及第二牙齿图像数据中以x轴、y轴及z轴为准利用具有最小位置值及最大位置值的顶点可检测第一及第二最大外廓区域a1、a2。
64.具体地说,第一及第二最大外廓区域a1、a2的下边是以y轴为准检测具有最小位置值的顶点,并且生成水平延长线以包括该顶点。然后,第一及第二最大外廓区域a1、a2的左右边是以x轴准检测分别具有最小位置值及最大位置值的顶点,并且生成垂直延长线以包括这些顶点。然后,第一及第二最大外廓区域a1、a2的上边是以对x轴二等分的二等分线l为准在左侧及右侧区域分别检测具有最大位置值的顶点,并且生成延长线以包括这些顶点。然后,生成将交叉所生成的延长线的点作为顶点的第一及第二最大外廓区域a1、a2。
65.图6及图7是用于说明作为本发明的第一实施例在牙列所有牙齿齐全的情况下在最大外廓区域中检测内切圆的方法的图;图8及图9是用于说明作为本发明的第一实施例在牙列没有一部分牙齿的情况下在最大外廓区域中检测内切圆的方法的图。
66.参照图6及图8,内切圆检测部120检测内切于第一最大外廓区域a1的第一内切圆s1。然后,参照图7及图9,检测内切于第二最大外廓区域a2的第二内切圆s2。
67.内切圆检测部120在第一最大外廓区域a1中可检测3个第一内切圆s1。具体地说,内切圆检测部120检测分别接触于构成第一最大外廓区域a1的左右侧上端角落的两边并具有第一半径的两个圆,以及可检测接触于在已检测的两个圆之间将第一最大外廓区域a1二等分的二等分线l与构成第一最大外廓区域a1下端的边相接的点并且具有第一半径的一个圆为第一内切圆s1。
68.同样地,内切圆检测部120在第二最大外廓区域a2中可检测3个第二内切圆s2。具体地说,内切圆检测部120检测分别接触于构成第二最大外廓区域a2的左右侧上端角落的两边并且具有第一半径的两个圆,以及检测接触于在已检测的两个圆之间将第二最大外廓区域a2二等分的二等分线l与构成第二最大外廓区域a2下端的边相接的点并且具有第一半径的一个圆为第二内切圆s2。
69.内切球检测部130检测作为第一内切圆s1的旋转体的第一内切球。
70.在此,第一内切球的x轴及y轴中心坐标与第一内切圆s1的x轴及y轴中心坐标一致,第二内切球的x轴及y轴中心坐标与第二内切圆s2的x轴及y轴中心坐标一致。
71.然后,内切球检测部130计算作为第一内切圆s1中的第一顶点的深度信息的z轴坐标的平均值作为第一内切球中心的z轴坐标,以第一内切球的中心为准可检测具有第一半径的第一内切球。
72.同样地,内切球检测部130检测作为第二内切圆s2的旋转体的第二内切球。
73.在此,第二内切球的x轴及y轴中心坐标与第二内切圆s2的x轴及y轴中心坐标一致,第二内切球的x轴及y轴中心坐标与第二内切圆s2的x轴及y轴中心坐标一致。
74.然后,内切球检测部130计算作为第二内切圆s2中的第二顶点的深度信息的z轴坐标的平均值作为第二内切球中心的z轴坐标,可检测以第二内切球的中心为准具有第一半径的第二内切球。
75.另一方面,在如此检测出的第一及第二内切球可包括牙齿。
76.图10是用于说明本发明的第一实施例的图像匹配部匹配第一及第二牙齿图像数据的方法的图。
77.图像匹配部140以第一及第二内切球为准匹配第一及第二牙齿图像数据。
78.具体地说,参照图10,图像匹配部140以第一及第二内切球为准重叠(over lap)第一及第二牙齿图像数据之后比较第一内切球中的第一顶点和第二内切球中的第二顶点之间的距离来匹配第一牙齿图像数据及第二牙齿图像数据。
79.图像匹配部140可反复匹配第一牙齿图像数据及第二牙齿图像数据直到第一顶点及第二顶点之间的所有距离之和在标准值以下。
80.在此,标准值可通过使用人员提前设定,并且根据目标的图像匹配准确度可有所不同。即,目标的图像匹配准确度越高则标准值就越小。
81.具体地说,参照图10,若反复匹配过程而充分缩短第一顶点s1、s2、s3及第二顶点d1、d2、d3之间的距离,则可反复匹配过程,以使从接触于第二顶点d1、d2、d3的平面延伸至第一顶点s1、s2、s3的延长线的距离l1、l2、l3、所述延长线及第二顶点d1、d2、d3的垂直向量的距离缩短。
82.与此不同,图像匹配部140可将第一牙齿图像数据及第二牙齿图像数据的匹配反复标准次数左右。
83.在此,对于标准次数可通过使用人员提前设定,并且根据目标的图像匹配准确度可有所不同。即,图像匹配次数反复得越多则图像匹配准确度就越高,因此目标的图像匹配准确度越高则标准次数就越大。
84.如此,本发明的第一实施例的牙齿图像匹配装置100只比较第一及第二牙齿图像数据的内切球中的顶点之间的距离来匹配图像,因此相比于比较第一牙齿图像数据及第二牙齿图像数据中的所有顶点之间的距离来匹配图像,可提高图像匹配速度,不仅如此还可将用于比较顶点之间的距离的系统的负载最小化。
85.另外,本发明的实施例的牙齿图像匹配装置100以高准确度自动执行图像匹配来提高使用人员的便利性,伴随着缩短种植计划所需的时间及提高种植计划的准确度。
86.本发明的第一实施例的牙齿图像匹配装置100还可包括显示第一牙齿图像数据及第二牙齿图像数据的匹配结果的显示部150。
87.显示部150显示第一及第二牙齿图像数据的匹配结果,以使使用人员能够确认。
88.具体地说,显示部150在显示匹配结果时提供能够定量掌握图像匹配结果的准确度的标记,诸如在匹配图像内用不同的颜色显示匹配错位或者相对不准确的部分等,以使使用人员能够客观掌握匹配的准确度。
89.如上所述的显示部150包括液晶显示器(lcd;liquid crystal display)、发光二
极管(led;light emitting diode)显示器、有机发光二极管(oled;organic led)显示器、微机电系统(mems;micro electro mechanical systems)显示器及电子纸(electronic paper)显示器。在此,显示部150与输入部(未示出)结合可实现触摸屏(touch screen)。
90.图11是本发明的第一实施例的牙齿图像匹配方法的流程图。
91.以下,参照图1至图11说明本发明的第一实施例的牙齿图像匹配方法,对于与上述的本发明的第一实施例的牙齿图像匹配装置相同的内容省略其说明。
92.首先,本发明的第一实施例的牙齿图像匹配方法检测在第一牙齿图像数据中作为牙列的最大外廓区域的第一最大外廓区域a1(s11)。
93.然后,检测内切于第一最大外廓区域a1的第一内切圆s1(s21),以及检测作为第一内切圆s1的旋转体的第一内切球(s31)。
94.同样地,检测在第二牙齿图像数据中作为牙列的最大外廓区域的第二最大外廓区域a2(s12)。
95.然后,检测内切于第二最大外廓区域a2的第二内切圆s2(s22),以及检测作为第二内切圆s2的旋转体的第二内切球(s32)。
96.然后,以第一及第二内切球为准匹配第一及第二牙齿图像数据(s40)。
97.在此,第一及第二牙齿图像数据匹配步骤(s40)为以第一及第二内切球为准重叠(over lap)第一及第二牙齿图像数据之后比较第一内切球中的第一顶点和第二内切球中的第二顶点之间的距离来第一及第二牙齿图像数据匹配步骤。
98.另外,第一及第二牙齿图像数据匹配步骤(s40)可以是反复匹配第一及第二牙齿图像数据,直到第一及第二顶点之间的所有距离之和在标准值以下的步骤。
99.另外,第一及第二牙齿图像数据匹配步骤(s40)可以是将第一及第二牙齿图像数据的匹配反复标准次数左右的步骤。
100.如上所述,本发明的第一实施例的牙齿图像匹配方法只比较第一及第二牙齿图像数据的内切球中的顶点之间的距离来匹配图像,因此相比于比较第一牙齿图像数据及第二牙齿图像数据中的所有顶点之间的距离来匹配图像,可提高图像匹配速度,不仅如此还可将用于比较顶点之间的距离的系统的负载最小化。
101.另外,本发明的第一实施例的牙齿图像匹配方法以高准确度自动执行图像匹配来提高使用人员的便利性,伴随着缩短种植计划所需的时间及提高种植计划的准确度。
102.另一方面,本发明的第一实施例的牙齿图像匹配方法编写成也可在电脑执行的程序,可在各种记录介质中实现,例如磁存储介质、光读取介质和数字存储介质。
103.在上述的第一实施例中举例说明了匹配ct图像数据和口腔扫描数据的图像,对于二维图像数据之间、二维和三维图像数据之间、三维图像数据之间的各种组合,诸如ct图像数据之间、口腔扫描图像数据之间及磁共振图像数据和ct图像数据之间等可与上述相同,在图像数据内检测牙列的最大外廓区域,在最大外廓区域内检测内切球,进而可执行图像匹配。此时,如上所述,在三维图像数据中检测牙齿最大外廓区域时除了x轴及y轴坐标以外,还考虑牙列的外廓根据牙冠的长度而有所不同,计算在牙冠长度内作为z轴坐标的深度坐标可检测最终的牙齿最大外廓区域。另外,除了上述的三维图像数据以外也可适用于包括四维图像数据的多维图像。
104.(第二实施例)
105.图12是本发明的第二实施例的牙齿图像匹配装置的框图。
106.如图12所示,本发明的第二实施例的牙齿图像匹配装置200可包括:最大外廓检测部210、中心点检测部220及图像匹配部240。
107.本发明的第二实施例的牙齿图像匹配装置200匹配第一牙齿图像数据和第二牙齿图像数据。
108.在此,第一牙齿图像数据及第二牙齿图像数据作为因为通过相互不同的图像拍摄装置获取或者在相互不同的时间点获取等的原因而具有相互不同的坐标系或者分辨率的图像数据,分别可以是ct(computed tomography)图像数据、口腔扫描(oral scan)图像数据及磁共振图像(magnetic resonance image;mri)数据中的一种。
109.另一方面,虽未在附图示出,但是本发明的第二实施例的牙齿图像匹配装置200还可包括方向对准部(未示出)及预处理部(未示出)。
110.在此,方向对准部(未示出)在匹配图像之前对齐第一牙齿图像数据及第二牙齿图像数据,以使第一牙齿图像数据及第二牙齿图像数据朝向相同的方向。
111.然后,预处理部(未示出)使在第一牙齿图像数据及第二牙齿图像数据的卷空间表示物体的单位距离相同,进而可使第一牙齿图像数据及第二牙齿图像数据的分辨率一致。然后,利用移动立方体算法(marching cube algorithm)将第一牙齿图像数据及第二牙齿图像数据的体素(voxel)信息转换为顶点(vertex)信息。
112.在此,移动立方体算法作为用于在三维图像数据中提取等值面(isosurface)的算法,是在该图像技术领域广泛使用的算法,因此省略详细说明。
113.图13及图14是作为本发明的第二实施例在二维牙齿图像数据中检测最大外廓区域及中心点的方法的图;图15及图16是用于说明作为本发明的第二实施例在三维牙齿图像数据中检测最大外廓区域及中心点的方法的图。
114.参照图13,最大外廓检测部210检测在第一牙齿图像数据中作为牙列的最大外廓区域的第一最大外廓区域a1。然后,参照图14,检测在第二牙齿图像数据中作为牙列的最大外廓区域的第二最大外廓区域a2。
115.在此,最大外廓区域a1、a2采用可将牙列内所有牙齿全部容纳的图形的形状,同时可定义为设定成使图形的各个角落与向该角落方向最突出牙齿部分接触的区域。即,最大外廓检测部210可检测第一及第二最大外廓区域a1、a2为各个角落与最突出的牙齿接触的多边形形状。
116.例如,如图13及图14所示,在牙列所有牙齿齐全的状态下,可检测出第一及第二最大外廓区域a1、a2为直角四边形。
117.另一方面,与附图不同,在牙列没有一部分牙齿(例如,臼齿)的情况下,也可检测出第一及第二最大外廓区域a1、a2为梯形状。
118.参照图15及图16,最大外廓检测部210除了x轴及y轴的二维上以外,还包括在牙冠长度内作为z轴坐标的深度坐标,在三维上可检测第一及第二最大外廓区域a1、a2。
119.最大外廓检测部210执行在第一及第二牙齿图像数据中分析结构及形状以及通过基于灰度的算法的图像分析处理,区分牙齿区域和除此以外的区域,例如,牙龈等的软组织和骨组织,进而在没有包括其他区域的情况下可在牙齿区域内检测第一及第二最大外廓区域a1、a2。
120.在此,最大外廓检测部210在第一及第二牙齿图像数据中以x轴、y轴及z轴为准利用具有最小位置值及最大位置值的顶点可检测第一及第二最大外廓区域a1、a2。
121.具体地说,第一及第二最大外廓区域a1、a2的下边是以y轴为准检测具有最小位置值的顶点,并且生成水平延长线以包括该顶点。然后,第一及第二最大外廓区域a1、a2的左右边是以x轴准检测分别具有最小位置值及最大位置值的顶点,并且生成垂直延长线以包括这些顶点。然后,第一及第二最大外廓区域a1、a2的上边是以对x轴二等分的二等分线l为准在左侧及右侧区域分别检测具有最大位置值的顶点,并且生成延长线以包括这些顶点。然后,生成将交叉所生成的延长线的点作为顶点的第一及第二最大外廓区域a1、a2。
122.参照图13,中心点检测部220检测二维的第一最大外廓区域a1的第一中心点c1。然后,参照图14,检测二维的第二最大外廓区域a2的第二中心点c2。
123.具体地说,中心点检测部220利用第一最大外廓区域a1中的第一顶点的x轴及y轴坐标的平均值检测第一中心点c1。然后,利用第二最大外廓区域a2中的第二顶点的x轴及y轴坐标的平均值检测第二中心点c2。
124.另外,参照图15,中心点检测部220检测三维的第一最大外廓区域a1的第一中心点c1。然后,参照图16,检测三维的第二最大外廓区域a2的第二中心点c2。
125.具体地说,中心点检测部220利用第一最大外廓区域a1中的第一顶点的x轴、y轴及z轴坐标的平均值检测第一中心点c1。然后,利用第二最大外廓区域a2中的第二顶点的x轴、y轴及z轴坐标的平均值检测第二中心点c2。
126.图17是用于说明本发明的第二实施例的图像匹配部匹配第一及第二牙齿图像数据的方法的图。
127.图像匹配部240以第一及第二中心点c1、c2为准匹配第一及第二牙齿图像数据。
128.具体地说,参照图17,图像匹配部240以第一及第二中心点c1、c2为准重叠(over lap)第一及第二牙齿图像数据之后比较第一最大外廓区域a1中的第一顶点和第二最大外廓区域a2中的第二顶点之间的距离来匹配第一牙齿图像数据及第二牙齿图像数据。
129.图像匹配部240可反复匹配第一牙齿图像数据及第二牙齿图像数据直到第一顶点及第二顶点之间的所有距离之和在标准值以下。
130.在此,标准值可通过使用人员提前设定,并且根据目标的图像匹配准确度可有所不同。即,目标的图像匹配准确度越高则标准值就越小。
131.具体地说,参照图17,若反复匹配过程而充分缩短第一顶点s1、s2、s3及第二顶点d1、d2、d3之间的距离,则可反复匹配过程,以使从接触于第二顶点d1、d2、d3的平面延伸至第一顶点s1、s2、s3的延长线的距离l1、l2、l3、所述延长线及第二顶点d1、d2、d3的垂直向量的距离缩短。
132.与上述不同,图像匹配部240也可将第一牙齿图像数据及第二牙齿图像数据的匹配反复标准次数左右。
133.在此,对于标准次数可通过使用人员提前设定,并且根据目标的图像匹配准确度可有所不同。即,图像匹配次数反复得越多则图像匹配准确度就越高,因此目标的图像匹配准确度越高则标准次数越大。
134.如上所述,本发明的第二实施例的牙齿图像匹配装置200只比较第一及第二牙齿图像数据的一及第二最大外廓区域a1、a2中的顶点之间的距离来匹配图像,因此相比于比
较第一牙齿图像数据及第二牙齿图像数据中的所有顶点之间的距离来匹配图像,可提高图像匹配速度,不仅如此还可将用于比较顶点之间的距离的系统的负载最小化。
135.另外,本发明的第二实施例的牙齿图像匹配装置200以高准确度自动执行图像匹配来提高使用人员的便利性,伴随着缩短种植计划所需的时间及可提高种植计划的准确度。
136.本发明的第二实施例的牙齿图像匹配装置200还可包括显示第一牙齿图像数据及第二牙齿图像数据的匹配结果的显示部250。
137.显示部250显示第一及第二牙齿图像数据的匹配结果,以使使用人员能够确认。
138.具体地说,显示部250在显示匹配结果时提供能够定量掌握图像匹配结果的准确度的标记,诸如在匹配图像内用不同的颜色显示匹配错位或者相对不准确的部分等,以使使用人员能够客观掌握匹配的准确度。
139.如上所述的显示部250包括液晶显示器(lcd;liquid crystal display)、发光二极管(led;light emitting diode)显示器、有机发光二极管(oled;organic led)显示器、微机电系统(mems;micro electro mechanical systems)显示器及电子纸(electronic paper)显示器。在此,显示部250与输入部(未示出)结合可实现触摸屏(touch screen)。
140.图18是本发明的第二实施例的牙齿图像匹配方法的流程图。
141.以下,参照图12至图18说明本发明的第二实施例的牙齿图像匹配方法,对于与上述的本发明的第二实施例的牙齿图像匹配装置相同的内容省略其说明。
142.首先,本发明的第二实施例的牙齿图像匹配方法检测在第一牙齿图像数据中作为牙列的最大外廓区域的第一最大外廓区域a1(s110)。
143.然后,检测第一最大外廓区域a1的第一中心点c1(s210)。
144.同样地,检测在第二牙齿图像数据中作为牙列的最大外廓区域的第二最大外廓区域a2(s120)。
145.然后,检测第二最大外廓区域a2的中心点c2(s220)。
146.然后,以第一及第二中心点c1、c2为准匹配第一及第二牙齿图像数据(s300)。
147.在此,第一及第二牙齿图像数据匹配步骤(s300)以第一及第二中心点c1、c2为准重叠(over lap)第一及第二牙齿图像数据之后比较第一最大外廓区域a1中的第一顶点和第二最大外廓区域a2中的第二顶点之间的距离来匹配第一及第二牙齿图像数据的步骤。
148.另外,第一及第二牙齿图像数据匹配步骤(s300)可以是反复匹配第一及第二牙齿图像数据直到第一及第二顶点之间的所有距离之和在标准值以下的步骤。
149.另外,第一及第二牙齿图像数据匹配步骤(s300)可以是将第一及第二牙齿图像数据的匹配反复标准次数左右的步骤。
150.如上所述,本发明的第二实施例的牙齿图像匹配方法只比较第一及第二牙齿图像数据的第一及第二最大外廓区域中的顶点之间的距离来匹配图像,因此相比于比较第一牙齿图像数据及第二牙齿图像数据中的所有顶点之间的距离来匹配图像,可提高图像匹配速度,不仅如此还可将用于比较顶点之间的距离的系统的负载最小化。
151.另外,本发明的第二实施例的牙齿图像匹配方法以高准确度自动执行图像匹配来提高使用人员的便利性,伴随着缩短种植计划所需的时间及可提高种植计划的准确度。
152.本发明的第二实施例的牙齿图像匹配方法编写成也可在电脑执行的程序,可在各
种记录介质中实现,例如磁存储介质、光读取介质和数字存储介质。
153.在上述的第二实施例中举例说明了匹配ct图像数据和口腔扫描数据的图像,对于二维图像数据之间、二维和三维图像数据之间、三维图像数据之间的各种组合,诸如ct图像数据之间、口腔扫描图像数据之间及磁共振图像数据和ct图像数据之间等可与上述相同,在图像数据内检测牙列的最大外廓区域,在最大外廓区域内检测中心点,进而可执行图像匹配。此时,如上所述,在三维图像数据中检测牙齿最大外廓区域时除了x轴及y轴坐标以外,还考虑牙列的外廓根据牙冠的长度而有所不同,计算在牙冠长度内作为z轴坐标的深度坐标可检测最终的牙齿最大外廓区域。另外,除了上述的三维图像数据以外也可适用于包括四维图像数据的多维图像。
154.另一方面,在本说明书和附图公开的本发明的实施例仅是为了容易说明本发明的技术内容并且有助于理解本发明而示出特定示例,并非要限定本发明的范围。即,以本发明的技术思想为基础可实施其他变形例对于在本发明所属技术领域中具有常规知识的人是显而易见的。
155.产业实用性
156.本发明的牙齿检测装置及方法可利用于各种牙科治疗领域,例如种植手术等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。