1.本发明涉及海岸线变化分析方法。
背景技术:
2.海岸线就是海洋和陆地之间的界线,一般有自然和人工岸线之分,由于其地理位置的特殊性及人类开发的影响,海岸线的位置总是不断的变化。海岸线的分类是对其进行保护与开发、海洋资源管理的重要依据,我国有着宽阔的领海,海岸线总长度约3.2万千米。海岸线滩涂有着良好的经济效益,而且也具有生态、环境、地质等方面的开发价值,是国家珍贵的资源。同时,海岸线的提取和分类对城市规划、经济发展、土地利用等领域的发展有着重要的指导作用。不同的标准下海岸线的分类结果有着较大的不同,而准确的掌握海岸线的类别是充分利用和保护海岸线资源的基础。
3.遥感是一种在不与目标对象直接接触的情况下,通过种类不同的传感器,对距离较远的目标区域采用主动的或者被动的方式发射或反射电磁波,从接收目标区域的回波特性以分析地面目标的各种特征,来进行不同方面的应用与研究。利用高分辨率遥感影像是当前大规模海岸线变化分析(包括岸线类型分类、岸线检测、岸线侵蚀与扩张分析)的主要手段。
4.近年来,深度学习以其优异的解译性能和广泛的适应能力在高分辨率遥感影像解译领域发展迅速。将深度学习应用于岸线分析领域,可有效提升解译精度。然而深度学习在海岸线研究方面还存在若干不足:一是岸线类型复杂,有些类别遥感场景目视上非常接近,难以实现岸线类型精确分类;二是针对不同类型岸线,其岸线位置的定义不同,因此导致岸线提取准则不同;三是给定多时相遥感图像,如何实现大场景中的海岸线精确提取与分析仍是需要研究的。
技术实现要素:
5.本发明的目的是为了解决现有岸线类型复杂,难以实现岸线类型精确分类;针对不同类型岸线,岸线提取准则不同;以及给定多时相遥感图像,如何实现大场景中的海岸线精确提取的问题,提出了一种基于深度学习的海岸线变化分析方法。
6.一种基于深度学习的海岸线变化分析方法具体过程为:
7.步骤一、选择所研究区域的海岸线数据集,将海岸线数据集分为训练集和测试集;
8.构建神经网络,将训练集输入神经网络进行训练,得到训练完成的网络,将测试集输入神经网络进行测试,输出海岸线类型,若测试结果满足要求得到训练好的神经网络,若测试结果不满足要求则通过调整模型参数或训练数据集重新进行训练,直至得到训练好的神经网络;
9.所述训练集包括多时相海岸线遥感影像和对应的海岸线类型;
10.步骤二、对多时相海岸线遥感影像进行处理,得到处理后的多时相海岸线遥感影像;
11.将处理后的多时相海岸线遥感影像输入训练好的神经网络,获得处理后的多时相海岸线遥感影像对应的海岸线类型;
12.步骤三、基于步骤二得到的海岸线类型,提取海岸线,获得海岸线图像;
13.步骤四、基于步骤三获得的海岸线图像,检测海岸线的位置变化,计算海岸线长度变化速率,以及海岸线侵蚀或淤积速率。
14.优选地,所述步骤一中选择所研究区域的海岸线数据集,将海岸线数据集分为训练集和测试集;
15.构建神经网络,将训练集输入神经网络进行训练,得到训练完成的网络,将测试集输入神经网络进行测试,输出海岸线类型,若测试结果满足要求得到训练好的神经网络,若测试结果不满足要求则通过调整模型参数或训练数据集重新进行训练,直至得到训练好的神经网络;
16.具体过程为:
17.步骤一一、选择所研究区域的海岸线数据集,将海岸线数据集分为训练集和测试集,其中训练集和测试集比例为4:1;
18.步骤一二、分别构建vgg16、mobilenet、resnet、inception
‑
resnet和xception神经网络,将训练集输入不同神经网络进行训练;
19.步骤一三、将测试集输入不同神经网络进行测试,输出海岸线类型,若测试结果满足要求得到训练好的神经网络,若测试结果不满足要求则通过调整模型参数或训练数据集重新进行训练,直至得到训练好的神经网络。
20.优选地,所述步骤二中对多时相海岸线遥感影像进行处理,得到处理后的多时相海岸线遥感影像;
21.将处理后的多时相海岸线遥感影像输入训练好的神经网络,获得处理后的多时相海岸线遥感影像对应的海岸线类型;具体过程为:
22.对多时相海岸线遥感影像进行图像去均值和裁剪,得到感兴趣的遥感影像区域;
23.将得到的感兴趣的遥感影像区域根据实际需要输入合适的训练好的神经网络,获得处理后的多时相海岸线遥感影像的海岸线类型。
24.优选地,所述步骤三中基于步骤二得到的海岸线类型,提取海岸线,获得海岸线图像;具体过程为:
25.步骤三一、基于步骤二得到的海岸线类型,采用归一化水体指数对海岸线进行提取;
26.步骤三二、基于步骤二得到的海岸线类型,采用hed网络对海岸线进行提取;
27.步骤三三、对比步骤三一和步骤三二提取方式在不同的海岸线类型上的提取效果,确定不同的海岸线类型应选取的提取方式。
28.优选地,所述步骤三一中基于步骤二得到的海岸线类型,采用归一化水体指数对海岸线进行提取,过程为:
29.计算归一化水体指数,设置阈值,将归一化水体指数和阈值进行比较,当归一化水体指数大于阈值时,识别为水体,当归一化水体指数小于等于阈值时,识别为陆地,得到水陆分割图像,通过填充空白区域处理方式对水陆分割图像进行处理,得到处理后的水陆识别图像,采用边缘算子对处理后的水陆识别图像进行提取,获得准确的海岸线;
30.所述归一化水体指数计算方式如下:
31.ndwi=(p(green)
‑
p(nir))/(p(green) p(nir))
32.其中,p(green)代表遥感影像绿色波段的灰度大小,p(nir)代表遥感影像红外波段的灰度大小。
33.优选地,所述步骤三二中基于步骤二得到的海岸线类型,采用hed网络对海岸线进行提取,过程为:
34.首先构建hed网络,利用bsds300数据集对hed网络进行训练,得到训练好的hed网络,将步骤二得到的已知海岸线类型的多时相海岸线遥感影像的rgb波段输入训练好的hed网络进行海岸线边缘提取,得到提取后的海岸线边缘,采用图像膨胀和腐蚀处理方式对提取后的海岸线边缘进行处理,获得准确的海岸线。
35.优选地,所述步骤四中基于步骤三获得的海岸线图像,检测海岸线的位置变化,计算海岸线长度变化速率,以及海岸线侵蚀或淤积速率;具体过程为:
36.步骤四一、计算海岸线长度变化速率,具体过程为:
37.首先对步骤三提取的海岸线图像进行二值化,计算非空白像素点的个数,将非空白像素点的个数乘以步骤三提取的海岸线图像的分辨率得到海岸线长度,根据不同时相图像中得到的海岸线长度计算海岸线长度变化速率;
38.步骤四二、计算海岸线的侵蚀或淤积速率。
39.优选地,所述步骤四二中计算海岸线的侵蚀或淤积速率,具体过程为:
40.对步骤三提取的海岸线图像进行数字化处理,即把图像中的像素点转化为笛卡尔坐标系中的坐标点;
41.选取进行数字化处理后的海岸线图像的部分区域,利用光滑样条拟合的方法对选取的部分区域进行海岸线形状拟合,得到拟合海岸线图像;
42.基于得到的拟合海岸线图像,从得到的拟合海岸线图像中选取时间最早的一条海岸线位置为基准线,垂直于基准线选取不同的剖面,在相应的剖面上计算海岸线的迁移距离,基于海岸线迁移的距离计算海岸线的侵蚀或淤积速率,结果的正负值分别代表海岸线的侵蚀和淤积。
43.优选地,所述在相应的剖面上计算海岸线的迁移距离具体过程为:
44.利用拟合海岸线图像确定海岸线像素点迁移后的大致位置,然后对确定的大致位置的像素点进行插值,得到迁移像素点位置,得到海岸线迁移的距离。
45.优选地,所述基于海岸线迁移的距离计算海岸线的侵蚀或淤积速率,计算方式如下:
[0046][0047]
其中,d1和d2分别为t1和t2时的海岸线位置数据;t1和t2分别对应海岸线迁移前后时间。
[0048]
本发明的有益效果为:
[0049]
本发明实现了在一定的精度下对未知海岸线类型的识别,针对不同类型海岸线设计提取方法,解决了不同类型岸线位置定义不同的问题,提高了海岸线提取准确率,增强了岸线提取的效果,同时完成了在多时相遥感图像的大场景中海岸线的精确提取与分析,最
终实现利用多时相遥感图像对海岸线变化的分析,解决现有岸线类型复杂,难以实现岸线类型精确分类;针对不同类型岸线,岸线提取准则不同;以及给定多时相遥感图像,如何实现大场景中的海岸线精确提取的问题。
[0050]
为了验证本发明所提出的方法的性能,针对一组多时相海岸线遥感数据进行了验证,其空间分辨率为3.125m,图像的覆盖区域为泰国罗勇府地区,三个时相的遥感图像采集时间为18年10月、19年3月和19年10月,图像大小为15945
×
5054,实验结果验证了本发明提出的基于深度学习的海岸线变化分析方法的有效性。对于训练样本数为964的类别,海岸线分类可以达到的最高单类准确度为86%,总体准确度达到65%,同时可以根据需求选取不同的网络结构;在岸线提取中,不同的方法展示了不同的提取优势;最终实现了对研究区域的海岸线变化分析。
附图说明
[0051]
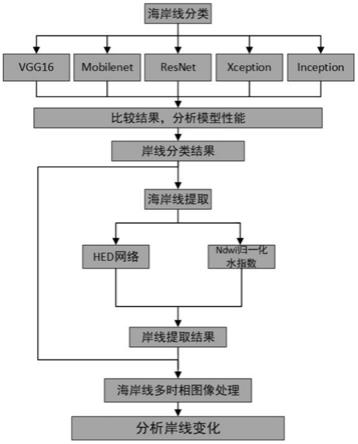
图1是本发明的实现流程示意图;
[0052]
图2a是构建inception
‑
resnet网络的训练过程中训练准确度的变化情况;
[0053]
图2b表示利用训练好的网络模型对测试集数据进行识别结果的混淆矩阵;
[0054]
图3a是基于归一化水体指数对码头海岸线进行提取的结果;
[0055]
图3b是基于归一化水体指数对河口海岸线进行提取的结果;
[0056]
图3c是利用基于hed网络的方法对淤泥质海岸线及其缓冲区海岸带提取的结果;
[0057]
图4a表示对现有数据进行图像镶嵌并裁剪后得到所要研究的遥感影像区域;
[0058]
图4b表示对图4a中所要研究的整体区域的海岸线进行提取,最终得到提取后的部分海岸线效果图;
[0059]
图4c是图4b中海岸线提取图进行数学坐标系表示的结果图;
[0060]
图4d是通过光滑样条法对海岸线进行拟合的部分结果图;
[0061]
图4e是海岸线侵蚀/淤积速率的计算过程示意图;
[0062]
图5a是部分区域1海岸线的变化情况示意图
[0063]
图5b是部分区域2海岸线的变化情况示意图
[0064]
图5c是部分区域3海岸线的变化情况示意图
[0065]
图5d是部分区域4海岸线的变化情况示意图。
具体实施方式
[0066]
具体实施方式一:结合图1说明本实施方式,本实施方式的一种基于深度学习的海岸线变化分析方法具体过程为:
[0067]
步骤一、选择所研究区域的海岸线数据集(多时相海岸线遥感影像和对应的海岸线类型(比如人工海岸线类型等)),将海岸线数据集分为训练集和测试集;
[0068]
构建神经网络,将训练集输入神经网络进行训练,得到训练完成的网络,将测试集输入神经网络进行测试,输出海岸线类型,若测试结果满足要求得到训练好的神经网络,若测试结果不满足要求则通过调整模型参数或训练数据集重新进行训练,直至得到训练好的神经网络;
[0069]
所述训练集包括多时相海岸线遥感影像和对应的海岸线类型;
[0070]
步骤二、对多时相海岸线遥感影像进行处理,得到处理后的多时相海岸线遥感影像;
[0071]
将处理后的多时相海岸线遥感影像输入训练好的神经网络,获得处理后的多时相海岸线遥感影像对应的海岸线类型;
[0072]
步骤三、基于步骤二得到的海岸线类型,采用合适的提取方法提取海岸线,获得海岸线图像;
[0073]
步骤四、基于步骤三获得的海岸线图像,检测海岸线的位置变化,计算海岸线长度变化速率,以及海岸线侵蚀或淤积速率。
[0074]
基于海岸线长度变化速率,以及海岸线侵蚀或淤积速率,分析海岸线变化趋势。
[0075]
具体实施方式二:本实施方式与具体实施方式一不同的是:所述步骤一中选择所研究区域的海岸线数据集,将海岸线数据集分为训练集和测试集;
[0076]
构建神经网络,将训练集输入神经网络进行训练,得到训练完成的网络,将测试集输入神经网络进行测试,输出海岸线类型,若测试结果满足要求得到训练好的神经网络,若测试结果不满足要求则通过调整模型参数或训练数据集重新进行训练,直至得到训练好的神经网络;
[0077]
具体过程为:
[0078]
步骤一一、选择所研究区域的海岸线数据集,将海岸线数据集分为训练集和测试集,其中训练集和测试集比例为4:1;
[0079]
步骤一二、分别构建vgg16、mobilenet、resnet、inception
‑
resnet和xception神经网络,将训练集输入不同神经网络(vgg16、mobilenet、resnet、inception
‑
resnet和xception)进行训练;
[0080]
步骤一三、将测试集输入不同神经网络(vgg16、mobilenet、resnet、inception
‑
resnet和xception)进行测试,输出海岸线类型,若测试结果满足要求得到训练好的不同神经网络,若测试结果满足要求得到训练好的神经网络,若测试结果不满足要求则通过调整模型参数或训练数据集重新进行训练,直至得到训练好的神经网络。如图2a、2b。
[0081]
不同的训练好的神经网络展现不同的优势,如mobilenet网络可以提供最快的训练速度,inception
‑
resnet网络可以提供最高的测试集准确度等。
[0082]
其它步骤与具体实施方式一相同。
[0083]
具体实施方式三:本实施方式与具体实施方式一或二不同的是:所述步骤二中对多时相海岸线遥感影像进行处理,得到处理后的多时相海岸线遥感影像;
[0084]
将处理后的多时相海岸线遥感影像输入训练好的神经网络,获得处理后的多时相海岸线遥感影像对应的海岸线类型;具体过程为:
[0085]
对多时相海岸线遥感影像进行图像去均值和裁剪,得到感兴趣的遥感影像区域;
[0086]
将得到的感兴趣的遥感影像区域根据实际需要输入合适的训练好的神经网络(如mobilenet网络可以提供最快的训练速度,inception
‑
resnet网络可以提供最高的测试集准确度等),获得处理后的多时相海岸线遥感影像的海岸线类型。
[0087]
其它步骤与具体实施方式一或二相同。
[0088]
具体实施方式四:本实施方式与具体实施方式一至三之一不同的是:所述步骤三中基于步骤二得到的海岸线类型,采用合适的提取方法提取海岸线(如归一化水体指数更
适用于大坝岸线、河口岸线等,hed网络更适用于淤泥质岸线等),获得海岸线图像;具体过程为:
[0089]
根据岸线类型识别结果,设计合适的海岸线提取方法,增强岸线提取的效果;
[0090]
步骤三一、基于步骤二得到的海岸线类型,采用归一化水体指数对海岸线进行提取;
[0091]
步骤三二、基于步骤二得到的海岸线类型,采用hed网络对海岸线进行提取;
[0092]
步骤三三、对比步骤三一和步骤三二提取方式在不同的海岸线类型上的提取效果,确定不同的海岸线类型应选取的提取方式(其中归一化水体指数更适用于大坝岸线、河口岸线等,hed网络更适用于淤泥质岸线等)。
[0093]
其它步骤与具体实施方式一至三之一相同。
[0094]
具体实施方式五:本实施方式与具体实施方式一至四之一不同的是:所述步骤三一中基于步骤二得到的海岸线类型,采用归一化水体指数对海岸线进行提取,过程为:
[0095]
计算归一化水体指数,设置阈值,将归一化水体指数和阈值进行比较,当归一化水体指数大于阈值时,识别为水体,当归一化水体指数小于等于阈值时,识别为陆地,得到水陆分割图像,通过去除小区域、填充空白区域(白色里会有小黑色,将小黑色填白,黑色里会有小白色,将小白色填黑,)等处理方式对水陆分割图像进行处理,得到处理后的水陆识别图像,采用边缘算子对处理后的水陆识别图像进行提取,获得准确的海岸线;
[0096]
所述归一化水体指数计算方式如下:
[0097]
ndwi=(p(green)
‑
p(nir))/(p(green) p(nir))
[0098]
其中,p(green)代表遥感影像绿色波段(步骤二处理后的多时相海岸线遥感影像的绿色波段)的灰度大小,p(nir)代表遥感影像红外波段(步骤二处理后的多时相海岸线遥感影像的绿色波段)的灰度大小。
[0099]
其它步骤与具体实施方式一至四之一相同。
[0100]
具体实施方式六:本实施方式与具体实施方式一至五之一不同的是:所述步骤三二中基于步骤二得到的海岸线类型,采用hed网络对海岸线进行提取,过程为:
[0101]
首先构建hed网络,利用bsds300数据集对hed网络进行训练,得到训练好的hed网络,将步骤二得到的已知海岸线类型的多时相海岸线遥感影像的rgb波段输入训练好的hed网络进行海岸线边缘提取,得到提取后的海岸线边缘,采用图像膨胀和腐蚀等处理方式对提取后的海岸线边缘进行处理,获得准确的海岸线。
[0102]
其它步骤与具体实施方式一至五之一相同。
[0103]
具体实施方式七:本实施方式与具体实施方式一至六之一不同的是:所述步骤四中基于步骤三获得的海岸线图像,检测海岸线的位置变化,计算海岸线长度变化速率,以及海岸线侵蚀或淤积速率;具体过程为:
[0104]
步骤四一、计算海岸线长度变化速率,具体过程为:
[0105]
首先对步骤三提取的海岸线图像进行二值化,计算非空白像素点的个数,将非空白像素点的个数乘以步骤三提取的海岸线图像的分辨率得到海岸线实际长度,根据不同时相图像中得到的海岸线实际长度计算海岸线长度变化速率;
[0106]
步骤四二、计算海岸线的侵蚀或淤积速率。
[0107]
其它步骤与具体实施方式一至六之一相同。
[0108]
具体实施方式八:本实施方式与具体实施方式一至七之一不同的是:所述步骤四二中计算海岸线的侵蚀或淤积速率,具体过程为:
[0109]
对步骤三提取的海岸线图像进行数字化处理,即把图像中的像素点转化(抽象)为笛卡尔坐标系中的坐标点;
[0110]
为保证岸线形状拟合准确度和人工岸线变化的影响,选取进行数字化处理后的海岸线图像的部分区域,利用光滑样条拟合的方法对选取的部分区域进行海岸线形状拟合,得到拟合海岸线图像(转换到数学形式,函数形式);
[0111]
基于得到的拟合海岸线图像(很多条),从得到的拟合海岸线图像中选取时间最早的一条海岸线位置为基准线,垂直于基准线选取不同的剖面,在相应的剖面上计算海岸线的迁移距离,基于海岸线迁移的距离计算海岸线的侵蚀或淤积速率,结果的正负值分别代表海岸线的侵蚀和淤积。
[0112]
其它步骤与具体实施方式一至七之一相同。
[0113]
具体实施方式九:本实施方式与具体实施方式一至八之一不同的是:所述在相应的剖面上计算海岸线的迁移距离具体过程为:
[0114]
利用拟合海岸线图像确定海岸线像素点迁移后的大致位置,把该迁移的像素点的位置确定在一个像素距离范围内,然后对确定的大致位置的像素点进行插值,得到迁移像素点精确位置,以提高海岸线提取的分辨率,得到海岸线迁移的距离。
[0115]
其它步骤及参数与具体实施方式一至八之一相同。
[0116]
具体实施方式十:本实施方式与具体实施方式一至九之一不同的是:所述基于海岸线迁移的距离计算海岸线的侵蚀或淤积速率,计算方式如下:
[0117][0118]
其中,d1和d2分别为t1和t2时的海岸线位置数据,一般利用多时相数据中时间跨度最大的两个,忽略了中间时期短暂的变化,反映出岸线长期的变化趋势;t1和t2分别对应海岸线迁移前后时间。
[0119]
其它步骤及参数与具体实施方式一至九之一相同。
[0120]
步骤五中结合前述步骤结果,综合分析岸线变化趋势;具体过程为:
[0121]
将不同时相的海岸线位置提取结果选取不同的呈现颜色进行对比,结合类型识别结果和相关速率计算方式,选取感兴趣的研究区域,对海岸线的变化过程进行分析。
[0122]
采用以下实施例验证本发明的有益效果:
[0123]
实施例一:
[0124]
本实施例一种基于深度学习的海岸线变化分析方法具体是按照以下步骤制备的:
[0125]
实验中所用到的海岸线数据集是对泰国的几个地区进行观测得到的遥感图像,样本共10类,去除数量较少的类别,选择8种海岸线进行网络的训练和测试,并在输入网络之前,对图像进行归一化、裁剪等预处理,完成图像增强;多时相数据为泰国罗勇府地区的海岸线遥感影像信息,共4个波段的,图像大小为15945
×
5054,分辨率为3.125米/像素,图像采集时间分别为2018年10月、2019年3月和2019年10月。在海岸线分类中,分别搭建了vgg16、mobilenet、resnet、inception
‑
resnet和xception神经网络,然后基于海岸线数据集对神经网络进行了训练和测试,初步实现了在满足一定识别精度下对未知海岸线图像类
别的正确识别,其中inception
‑
resnet网络最终的测试集准确度可以达到64.88%,为各网络的最高值,mobilenet网络提供了最大的训练速度。其次,利用基于归一化水体指数和基于hed边缘提取网络的方法实现了对遥感图像信息中不同类别海岸线位置信息的提取,图3a是基于归一化水体指数对码头海岸线进行提取的结果;图3b是基于归一化水体指数对河口海岸线进行提取的结果;图3c是利用基于hed网络的方法对淤泥质海岸线及其缓冲区海岸带提取的结果;最后,根据已有的方法和结论,对目标区域的海岸线进行了简单的变化分析,图4a表示对现有数据进行图像镶嵌并裁剪后得到所要研究的遥感影像区域;图4b表示对图4a中所要研究的整体区域的海岸线进行提取,最终得到提取后的部分海岸线效果图;图4c是图4b中海岸线提取图进行数学坐标系表示的结果;图4d是通过光滑样条法对海岸线进行拟合的部分结果;图4e是海岸线侵蚀/淤积速率的计算过程示意;图5a、5b、5c、5d是部分区域海岸线的变化情况示意;之后,结合不同时期的海岸线提取结果和速率计算结果,可以实现对相关时间段内海岸线的变化情况的分析。
[0126]
本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,本领域技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。