1.本发明涉及建筑结构安全性能评估技术领域,具体涉及一种基于柔度变化率与模式匹配的震后结构损伤快速识别方法。
背景技术:
2.地震的发生往往导致巨大的人员伤亡和经济损失,对社会造成的危害十分巨大。经过几十年的发展,我国地震工作逐步形成以“地震监测预报、地震灾害防御、地震紧急救援”为主要内容的三大工作体系。对地震紧急救援而言,震后损伤识别速度的快慢是首要的考虑因素,其目的不在于对绝对精准度的追求,而在于精准度在可接受的范围内实现损伤快速识别预评估。震后结构损伤快速识别方法的研究为震后的紧急救援和应急决策提供科学的理论依据,对提高政府对地震的应急反应能力和震后应急工作的效率,最大限度地减少地震灾害造成的人员伤亡和损失具有重大的意义。如何实现快速损伤识别是结构震后应急和救援所研究的一个主要问题。
3.目前,在结构损伤检测领域采用模式匹配方法的研究较少,关于模式匹配方法的研究现状仍然存在以下几个问题:
①
匹配向量与激励因素有关时,无法建立模式库;
②
采用时域范畴的损伤特征参数时,计算量非常大;
③
以应变作特征参数时,需要大量的传感器。而且传统基于柔度矩阵识别结构损伤的方法可以识别损伤的有无,但是不能对损伤程度进行量化。
技术实现要素:
4.本发明的目的在于克服将模式匹配方法应用到结构损伤检测领域时存在的缺点,并且弥补了传统基于柔度的损伤检测方法无法对损伤程度进行量化的不足,提供一种基于柔度变化率与模式匹配的震后结构损伤快速识别方法,实现对结构震后的损伤快速识别。
5.本发明的目的可以通过采取如下技术方案达到:
6.一种基于柔度变化率与模式匹配的震后结构损伤快速识别方法,所述震后结构损伤快速识别方法包括下列步骤:
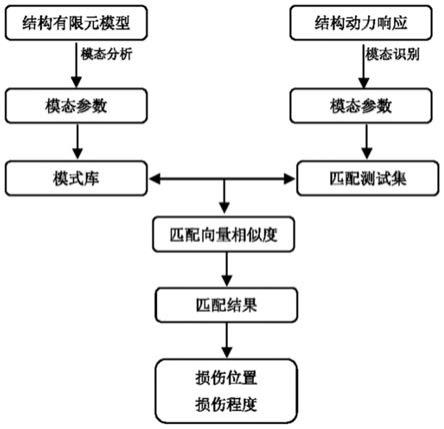
7.s1、利用有限元软件,对识别对象结构建立结构的有限元模型;由损伤位置和损伤程度构成的排列组合的损伤情况形成损伤模式库中的所有损伤工况,并对所有损伤工况进行模态分析,得到各种损伤工况下识别对象结构的模态振型、固有频率;
8.s2、计算各种损伤工况的柔度变化率,建立带损伤位置和损伤程度标签的以柔度变化率为参数的损伤模式库,柔度变化率的计算过程如下:
[0009][0010]
式中,f为柔度矩阵,f
ij
的物理意义是在位置j测量点施加单位集中力时,在位置i测量点产生的位移,r为模态阶数,ω
r
为识别对象结构第r阶的固有频率,φ
i(r)
、φ
j(r)
分别表示位置i测量点的第r阶模态振型值与位置j测量点的第r阶模态振型值的乘积,i=1,2,
…
,m,j=1,2,
…
,n;
[0011]
计算无损和损伤工况的柔度矩阵变化量δf,计算公式如下:
[0012]
δf=f
d
‑
f
u
[0013]
式中,f
u
、f
d
分别为无损和损伤工况的柔度矩阵;
[0014]
通过柔度矩阵对角线元素计算柔度矩阵变化率δf,计算公式如下:
[0015][0016]
其中,diag(
·
)为柔度矩阵的对角线元素,f
iiu
、f
iid
分别表示无损和损伤工况柔度矩阵的对角元素,[]
′
表示行向量的转置;
[0017]
损伤模式库中各种损伤的匹配向量如下:
[0018]
δf
p
=[δf
1 δf
2 δf3ꢀ…ꢀ
δf
p
ꢀ…ꢀ
δf
q
]
[0019]
其中,δf
p
表示损伤模式库中的第p种损伤工况的柔度变化率,p=1,2,
…
,q;
[0020]
s3、在待进行识别对象结构上安装加速度传感器,测量识别对象结构的加速度响应;
[0021]
s4、对所测识别对象结构的动力响应进行模态识别,得到识别对象结构的第r阶实测固有频率ω
tr
和振型φ
t(r)
=[φ
t1(r) φ
t2(r)
ꢀ…ꢀ
φ
tj(r)
ꢀ…ꢀ
φ
tn(r)
]',其中,φ
tj(r)
为位置j测量第r阶实测振型值,j=1,2,
…
,n;
[0022]
s5、将实测振型和固有频率按照步骤s2计算得到识别对象结构实测柔度矩阵t:
[0023][0024]
其中,ω
tr
为识别对象结构第r阶的固有频率,φ
ti(r)
、φ
tj(r)
表示识别对象结构位置i测量点的第r阶模态振型值与位置j测量点的第r阶模态振型值的乘积,计算柔度变化率
向量形成测试匹配向量集δt
k
:
[0025]
δt
k
=[δt
1 δt
2 δt3ꢀ…ꢀ
δt
k
ꢀ…ꢀ
δt
p
]
[0026]
其中,δt
k
表示测试集中的第k种待测工况,k=1,2,
…
,p;
[0027]
s6、将测试匹配向量集中的匹配向量δt
k
依次与步骤s2中建立的损伤模式库中各种损伤的匹配向量δf
p
进行相似度度量;
[0028]
s7、确定相似度度量的匹配结果最小值对应的损伤模式库中编号下的损伤工况即为该实测工况的损伤。
[0029]
进一步地,所述步骤s6中采用欧氏距离法进行相似度度量,计算公式给如下:
[0030]
其中,δf
p
(a)为损伤模式库中第a个损伤工况的柔度变化率向量;δt
k
(b)为测试集中第b个待测工况的柔度变化率向量。
[0031]
进一步地,所述步骤s7中,当出现两个较为接近的最小值时,则认为损伤模式库中对应的这两种损伤均为实测工况的损伤。
[0032]
进一步地,所述步骤s4中,利用复模态指示函数法cmif对所测识别对象结构的动力响应进行模态识别。
[0033]
本发明相对于现有技术具有如下的优点及效果:
[0034]
1)柔度变化率为n
×
1维的向量,根据欧氏距离算法公式可知,本发明数据匹配的计算量少,因此计算速度快,可以快速进行损伤识别,同时避免了传统识别方法中结构特征提取过程。
[0035]
2)根据柔度变化率公式可知,柔度变化率只与模态信息相关,而模态信息不随外界激励变化而变化,反映结构的固有属性,故利用柔度改变率作为匹配向量可以实现剔除激励的影响,使得建立的损伤模式库只与结构固有属性有关而不受外界环境因素的影响;
[0036]
3)传统基于柔度矩阵识别结构损伤的方法可以识别损伤的有无,但是不能对损伤程度进行量化。本发明提出的方法,将柔度变化率与模式匹配相结合,充分利用柔度变化率对损伤的敏感性,同时模式匹配方法可以量化损伤程度,弥补了传统基于柔度矩阵识别结构损伤方法的不足。
附图说明
[0037]
图1是本发明实施例中公开的基于柔度变化率与模式匹配的震后结构损伤快速识别方法的流程步骤图;
[0038]
图2是本发明实施例中公开的实验结构模型图;
[0039]
图3是本发明实施例中利用复模态指示函数法cmif进行模态参数识别的前两阶模态振型识别结果对比图,其中,图3(a)是一阶模态振型识别结果图,图3(b)是二阶模态振型
识别结果图;
[0040]
图4是本发明实施例中匹配的无损工况结果示意图;
[0041]
图5是本发明实施例中匹配的单损工况结果示意图;
[0042]
图6是本发明实施例中匹配的双损工况结果示意图。
具体实施方式
[0043]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0044]
实施例
[0045]
如图1所示,图1是本发明实施例中公开的基于柔度变化率与模式匹配的损伤快速识别方法的流程步骤图,本实施例中实验模型为一个四层集中质量结构,层高为0.2m,总高为0.8m;密度为7850kg/m^3;泊松比为0.288;弹性模量为210gpa;梁单元截面尺寸宽为93mm;厚度为9.25mm;一至四层质量分别为2.0444kg、2.0449kg、2.0538kg、2.0445kg。损伤的设置则根据截面惯性矩公式i=bh3/12及刚度k=ei,通过改变b的值使结构刚度降低,达到所需设计的损伤程度,实验结构及损伤设置如图2所示。损伤程度和损伤位置构成排列组合形成的损伤模式库损伤模式库工况如表1所示,表中损伤工况从左往右分别对应一层到四层的损伤,例如,“20
‑
20
‑0‑
0”表示:一层损伤20%,二层损伤20%,以此类推。
[0046]
表1.损伤模式库
[0047]
序号损伤工况序号损伤工况序号损伤工况序号损伤工况10
‑0‑0‑
02120
‑0‑0‑
40410
‑
40
‑
20
‑
0610
‑
60
‑
60
‑
0220
‑0‑0‑
02220
‑0‑0‑
60420
‑
40
‑
40
‑
0620
‑
60
‑0‑
20340
‑0‑0‑
0230
‑
20
‑
20
‑
0430
‑
40
‑
60
‑
0630
‑
60
‑0‑
40460
‑0‑0‑
0240
‑
20
‑
40
‑
0440
‑
40
‑0‑
20640
‑
60
‑0‑
6050
‑
20
‑0‑
0250
‑
20
‑
60
‑
0450
‑
40
‑0‑
40650
‑0‑
60
‑
2060
‑
40
‑0‑
0260
‑
20
‑0‑
20460
‑
40
‑0‑
60660
‑0‑
60
‑
4070
‑
60
‑0‑
0270
‑
20
‑0‑
40470
‑0‑
40
‑
20670
‑0‑
60
‑
6080
‑0‑
20
‑
0280
‑
20
‑0‑
60480
‑0‑
40
‑
406820
‑0‑
20
‑
2090
‑0‑
40
‑
0290
‑0‑
20
‑
20490
‑0‑
40
‑
606940
‑
40
‑0‑
40100
‑0‑
60
‑
0300
‑0‑
20
‑
405060
‑
20
‑0‑
0700
‑
60
‑
60
‑
60110
‑0‑0‑
20310
‑0‑
20
‑
605160
‑
40
‑0‑
07120
‑0‑
40
‑
60120
‑0‑0‑
403240
‑
20
‑0‑
05260
‑
60
‑0‑
07220
‑0‑
20
‑
40130
‑0‑0‑
603340
‑
40
‑0‑
05360
‑0‑
20
‑
07320
‑0‑
40
‑
401420
‑
20
‑0‑
03440
‑
60
‑0‑
05460
‑0‑
40
‑0ꢀꢀ
1520
‑
40
‑0‑
03540
‑0‑
20
‑
05560
‑0‑
60
‑0ꢀꢀ
1620
‑
60
‑0‑
03640
‑0‑
40
‑
05660
‑0‑0‑
20
ꢀꢀ
1720
‑0‑
20
‑
03740
‑0‑
60
‑
05760
‑0‑0‑
40
ꢀꢀ
1820
‑0‑
40
‑
03840
‑0‑0‑
205860
‑0‑0‑
60
ꢀꢀ
1920
‑0‑
60
‑
03940
‑0‑0‑
40590
‑
60
‑
20
‑0ꢀꢀ
2020
‑0‑0‑
204040
‑0‑0‑
60600
‑
60
‑
40
‑0ꢀꢀ
[0048]
具体实施过程如下:
[0049]
s1、利用有限元软件,对识别对象结构建立结构的有限元模型;由损伤位置和损伤程度构成的排列组合的损伤情况形成损伤模式库中的所有损伤工况,并对所有损伤工况进行模态分析,得到各种损伤工况下识别对象结构的模态振型、固有频率;
[0050]
s2、计算各种损伤工况的柔度变化率,建立带损伤位置和损伤程度标签的以柔度变化率为参数的损伤模式库,柔度变化率的公式推导过程如下:
[0051][0052]
式中,f为柔度矩阵,f
ij
的物理意义是在位置j测量点施加单位集中力时,在位置i测量点产生的位移,r为模态阶数,ω
r
为识别对象结构第r阶的固有频率,φ
i(r)
φ
j(r)
表示位置i测量点的第r阶模态振型值与位置j测量点的第r阶模态振型值的乘积,i=1,2,
…
,m,j=1,2,
…
,n。
[0053]
计算无损和损伤工况的柔度矩阵变化量δf,计算公式如下:
[0054]
δf=f
d
‑
f
u
[0055]
式中,f
u
、f
d
分别为无损和损伤工况的柔度矩阵;
[0056]
通过柔度矩阵对角线元素计算柔度矩阵变化率δf,计算公式如下:
[0057][0058]
其中,diag(
·
)为柔度矩阵的对角线元素,f
iiu
、f
iid
分别表示无损和损伤工况柔度矩阵的对角元素,[]
′
为行向量的转置。
[0059]
损伤模式库中各种损伤的匹配向量如下:
[0060]
δf
p
=[δf
1 δf
2 δf3ꢀ…ꢀ
δf
q
]
[0061]
其中,δf
p
表示损伤模式库中的第p种损伤工况的柔度变化率,p=1,2,
…
,q;本实施例中,损伤模式库损伤工况总数q为73。
[0062]
s3、在3种待进行识别对象结构上安装加速度传感器,测量识别对象结构的加速度响应;实验工况表如表2所示:
[0063]
表2.实验工况表
[0064]
工况无损单损双损损伤位置与程度0
‑0‑0‑
060
‑0‑0‑
020
‑
40
‑0‑0[0065]
表2中,损伤工况从左往右分别对应一层到四层的损伤,例如,“20
‑
40
‑0‑
0”表示:
一层损伤20%,二层损伤40%,以此类推。
[0066]
s4、利用复模态指示函数法cmif对所测结构动力响应进行模态识别,得到识别对象结构的前两阶实测固有频率ω
tr
和振型φ
t(r)
=[φ
t1(r) φ
t2(r)
ꢀ…ꢀ
φ
tn(r)
]',其中,φ
tn(r)
为位置n测量第r阶实测振型值,如图3所示。前两阶实测固有频率ω
tr
如表3所示
[0067]
表3.固有频率识别结果表
[0068][0069]
s5、将实测振型和固有频率按照步骤s2计算得到结构实测柔度矩阵t:
[0070][0071]
同理可得柔度变化率向量δt形成测试匹配向量集δt
k
:
[0072]
δt
k
=[δt
1 δt
2 δt3ꢀ…ꢀ
δt
p
]
[0073]
其中,δt
k
表示测试集中的第k种待测工况,k=1,2,
…
,p。本实施例中,待测工况数p为3。
[0074]
s6、将测试匹配向量集中的匹配向量δt
k
依次与步骤s2中建立的损伤模式库δf
p
采用欧氏距离法进行相似度度量。计算公式给如下:
[0075][0076]
其中,其中,δf
p
(a)为损伤模式库中第a个损伤工况的柔度变化率向量;δt
k
(b)为测试集中第b个待测工况的柔度变化率向量。
[0077]
s7、确定相似度度量的匹配结果最小值对应的损伤模式库中编号下的损伤工况即为该实测工况的损伤;当出现两个较为接近的最小值时,则认为损伤模式库中对应的这两种损伤均为实测工况的损伤。如图4、图5、图6所示,分别为无损工况、单损工况和双损工况的匹配结果图。
[0078]
综上所述,上述实施例提出一种柔度变化率与模式匹配的结构损伤快速识别方法,将柔度变化率与模式匹配相结合,充分利用柔度变化率对损伤的敏感性,同时模式匹配方法可以量化损伤程度,弥补了传统基于柔度矩阵识别结构损伤方法的不足。另一方面,该方法以柔度改变率作为匹配向量,剔除了激励的影响;通过模态分析迅速完成模式库的建立;将加速度响应信号处理得到的匹配向量依次与模式库根据欧氏距离算法进行匹配,避
免了大量的计算,从而实现对结构损伤位置和损伤程度的快速识别。
[0079]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。