1.本实用新型涉及一种自动图像数据采集设备领域,尤其涉及一种基于深度和彩色多源信息融合的单件分离系统。
背景技术:
2.在互联网经济的快速发展下,快递物流的数量得到指数级增长,传统物流下形成的人工分拣已完全无法处理,成本及时效性也无法达到保证,大的物流公司也纷纷进行智能物流装备的改造及升级,但是因为快递包裹的种类繁多,尤其在中转场,对于大小形状等不规则的快递无法实现自动化很高的分拣方式,仍然以人工初分为主。
3.在此技术背景下,需要设计一种基于深度和彩色多源信息融合的单件分离系统,才能有效解决长期困扰行业效率问题。
4.有鉴于上述的缺陷,本设计人,积极加以研究创新,以期创设一种更具有产业上的利用价值的基于深度和彩色多源信息融合的单件分离系统。
技术实现要素:
5.为解决上述技术问题,本实用新型的目的是提供一种基于深度和彩色多源信息融合的单件分离系统。
6.本实用新型的基于深度和彩色多源信息融合的单件分离系统,包括图像采集系统、坐标采集系统、传送系统、分拣系统、控制器和处理器,所述处理器和图像采集系统、坐标采集系统通讯连接,所述控制器和传送系统、分拣系统通讯连接,所述传送系统包括由所述控制器通讯控制的主传送装置以及若干分传送装置,所述主传送装置中主传送带的传入端上方设有所述图像采集系统和坐标采集系统,每一个所述分传送装置中分传送带上的传送端与所述主传送带的传出端抵触相接,分别位于所述主传送带两侧的若干所述分传送带设置为相交错分布,所述分拣系统包括分别位于所述主传送带和每一个所述分传送带相接处的第一分拣装置与/或者位于所述主传送带和每一个所述分传送带之间的第二分拣装置,所述第一分拣装置是由直流伺服电机控制抓取的机械手,所述机械手是由伸缩气缸控制旋转的导料板,所述图像采集系统包括3d相机和彩色相机。
7.进一步的,所述处理器和图像采集系统、坐标采集系统一体成型设置信息采集子系统。
8.进一步的,在所述伸缩气缸控制下的所述导料板的旋转角度α在30~60
°
之间,所述分传送带和主传送带之间所成的夹角大于α。
9.进一步的,所述控制器上设有触控屏。
10.进一步的,所述处理器是嵌入式计算视觉处理器,所述控制器中的cpu包括与所述处理器通讯连接的无线通讯装置。
11.进一步的,所述坐标采集系统包括三位激光式扫描仪或者照相机式扫描仪。
12.借由上述方案,本实用新型至少具有以下优点:
13.本系统主要包含实时图像采集系统和坐标采集系统、传送系统、分拣系统、控制器和处理器,通过图像采集系统和坐标采集系统,实时收集影像信息,处理器计算出每个包裹的轮廓及坐标信息(长宽高/形状/坐标),根据不同的决策输入,控制器控制分拣系统实现单件精确分离。
14.图像采集单元即深度信息采集单元主要采集物体的高度信息及点云图,计算物体的长度,当物体的高度接近时,需要融合彩色信息来定位不同物体,计算性能可达毫秒及响应。
15.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。
附图说明
16.图1是本实用新型的基于深度和彩色多源信息融合的单件分离系统的流程图;
17.图2是本实用新型的基于深度和彩色多源信息融合的单件分离系统的流程图;
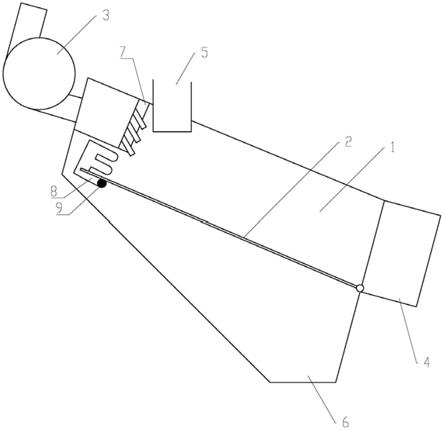
18.图3是图1的结构示意图;
19.图4是图像采集系统和坐标采集系统的原理图。
20.1 控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2 主传送带
21.3 分传送带
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4 机械手
22.5 导料板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6 图像采集系统
23.7 坐标采集系统
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
8 触控屏
24.9 处理器
具体实施方式
25.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
26.图1~图4所示的一种基于深度和彩色多源信息融合的单件分离系统,包括图像采集系统6、坐标采集系统7、传送系统、分拣系统、控制器1和处理器9,处理器9和图像采集系统6、坐标采集系统7通讯连接,控制器1和传送系统、分拣系统通讯连接,传送系统包括由控制器1通讯控制的主传送装置以及若干分传送装置,主传送装置中主传送带2的传入端上方设有图像采集系统6和坐标采集系统7,每一个分传送装置中分传送带3上的传送端与主传送带2的传出端抵触相接,分别位于主传送带2两侧的若干分传送带3设置为相交错分布,分拣系统包括分别位于主传送带2和每一个分传送带3相接处的第一分拣装置与/或者位于主传送带2和每一个分传送带3之间的第二分拣装置,第一分拣装置是由直流伺服电机控制抓取的机械手4,机械手4是由伸缩气缸控制旋转的导料板5,图像采集系统6包括3d相机和彩色相机。
27.在本实施例中,处理器9和图像采集系统6、坐标采集系统7一体成型设置信息采集子系统。
28.在本实施例中,在伸缩气缸控制下的导料板5的旋转角度α在30~60
°
之间,分传送带3和主传送带2之间所成的夹角大于α。
29.在本实施例中,控制器1上设有触控屏8。
30.在本实施例中,处理器9是嵌入式计算视觉处理器,控制器1中的cpu包括与处理器9通讯连接的无线通讯装置。
31.在本实施例中,所述坐标采集系统7包括三位激光式扫描仪或者照相机式扫描仪。
32.本实用新型的原理在于:
33.图像采集系统6中的深度相机或者模组和彩色相机7或者模组可以是集成一体的,也可以是分立的,集成一体的好处是两个采集单元视场一致,软件算法处理简单,独立模组需要视场匹配校准,但是都是能实现信息采集功能。
34.图像采集系统6和坐标采集系统7采集的二维及三维数据如下:
35.1、深度图数据
36.2、彩色图数据
37.3、点云图数据
38.4、ir图数据
39.分拣系统和传送系统常用摆轮/机械臂。
40.处理器9和控制器1的处理和控制原理在于:
41.1、处理器9处理并计算包裹大小、形状、坐标;
42.2、控制器1基于有效信息,将决策及控制逻辑下发给第一分拣装置和第二分拣装置中的plc等中间控制单元后,plc等中间控制单元执行相关决策,驱动第一分拣装置和第二分拣装置,实现精确分拣。
43.以上仅是本实用新型的优选实施方式,并不用于限制本实用新型,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
技术特征:
1.一种基于深度和彩色多源信息融合的单件分离系统,其特征在于:包括图像采集系统、坐标采集系统、传送系统、分拣系统、控制器和处理器,所述处理器和图像采集系统、坐标采集系统通讯连接,所述控制器和传送系统、分拣系统通讯连接,所述传送系统包括由所述控制器通讯控制的主传送装置以及若干分传送装置,所述主传送装置中主传送带的传入端上方设有所述图像采集系统和坐标采集系统,每一个所述分传送装置中分传送带上的传送端与所述主传送带的传出端抵触相接,分别位于所述主传送带两侧的若干所述分传送带设置为相交错分布,所述分拣系统包括分别位于所述主传送带和每一个所述分传送带相接处的第一分拣装置与/或者位于所述主传送带和每一个所述分传送带之间的第二分拣装置,所述第一分拣装置是由直流伺服电机控制抓取的机械手,所述机械手是由伸缩气缸控制旋转的导料板,所述图像采集系统包括3d相机和彩色相机。2.根据权利要求1所述的基于深度和彩色多源信息融合的单件分离系统,其特征在于:所述处理器和图像采集系统、坐标采集系统一体成型设置信息采集子系统。3.根据权利要求1所述的基于深度和彩色多源信息融合的单件分离系统,其特征在于:在所述伸缩气缸控制下的所述导料板的旋转角度α在30~60
°
之间,所述分传送带和主传送带之间所成的夹角大于α。4.根据权利要求1所述的基于深度和彩色多源信息融合的单件分离系统,其特征在于:所述控制器上设有触控屏。5.根据权利要求1所述的基于深度和彩色多源信息融合的单件分离系统,其特征在于:所述处理器是嵌入式计算视觉处理器,所述控制器中的cpu包括与所述处理器通讯连接的无线通讯装置。6.根据权利要求1所述的基于深度和彩色多源信息融合的单件分离系统,其特征在于:所述坐标采集系统包括三维激光式扫描仪或者照相机式扫描仪。
技术总结
本实用新型涉及一种基于深度和彩色多源信息融合的单件分离系统,处理器和图像采集系统、坐标采集系统通讯连接,控制器和传送系统、分拣系统通讯连接,传送系统包括由控制器通讯控制的主传送装置以及若干分传送装置,主传送装置中主传送带的传入端上方设有图像采集系统和坐标采集系统,每一个分传送装置中分传送带上的传送端与主传送带的传出端抵触相接,分别位于主传送带两侧的若干分传送带设置为相交错分布,分拣系统包括分别位于主传送带和每一个分传送带相接处的第一分拣装置与/或者位于主传送带和每一个分传送带之间的第二分拣装置;本实用新型提供了一种提高分拣效率和精度的自动单件分离系统。度的自动单件分离系统。度的自动单件分离系统。
技术研发人员:赵国武 王成 张建树
受保护的技术使用者:苏州视印智能系统有限公司
技术研发日:2020.12.31
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。