1.本技术涉及工业互联网技术领域,尤其涉及工业互联网网络运维实训系统。
背景技术:
2.当前制造业正处在由网络化、数字化向智能化发展的重要阶段,该阶段的核心是基于海量工业数据的全面感知,通过端到端的数据深度集成与建模分析,实现智能化的决策与控制,形成智能化生产、网络化协同、个性化定制等新型制造模式。
3.工业互联网是新一代信息通信技术与现代工业技术深度融合的产物,是制造业数字化、网络化、智能化的重要载体,具有工业大数据的转换、处理、分级储存、分析挖掘、可视化处理等功能,在目前相关技术的工业互联网的工业系统中,用户通过观测工业系统的实体设备的运行数据,或用户在实体设备的相关资料中获取运维数据和工况数据,以得到系统的运行情况。
4.然而,由于系统运行导致运维数据和工况数据是变化的,在相关资料中记载并不准确,此外,通过用户观测实体设备,实地考察具有不便捷性,不能更好的为用户提供工业互联网相关的一些运维数据和工况数据。
技术实现要素:
5.有鉴于此,本技术提供一种工业互联网网络运维实训系统,可以得到该系统在运行过程中的实时数据以及数据变化趋势,且可以满足用户在工业互联网实训过程中全流程参与互动的最佳体验。
6.第一方面,本技术提供一种工业互联网网络运维实训系统,该实训系统包括:可编程逻辑控制器plc、射频识别rfid装置、伺服电机、步进电机、传感器模块、扫码装置和二维码盘,所述plc与所述rfid装置、所述伺服电机和所述步进电机相连;所述二维码盘用于以二维码的形式记录第一信息、第二信息、第三信息和第四信息,所述第一信息用于指示所述plc获取所述伺服电机和所述步进电机的目标工作状态,所述第二信息用于指示所述plc控制所述伺服电机工作,所述第三信息用于指示所述plc控制所述步进电机工作,所述第四信息用于指示所述plc对所述传感器模块采集的运行数据进行处理;所述传感器模块用于采集所述伺服电机和所述步进电机处于工作状态时的运行数据;所述rfid装置用于存储第五信息和第六信息,所述第五信息用于指示所述伺服电机的第一目标工作状态,所述第六信息用于指示所述步进电机的第二目标工作状态;所述扫码装置用于扫描所述第一信息、所述第二信息、所述第三信息和所述第四信息,并向所述plc发送所述第一信息、所述第二信息、所述第三信息和所述第四信息;所述plc用于:接收到所述第一信息时获取所述第五信息和所述第六信息,并将所述第五信息和所述第六信息写入所述rfid装置;接收到所述第二信息时从所述rfid装置读取所述第五信息,并基于所述第五信息向所述伺服电机发送第一控制信号,所述第一控制信号用于控制所述伺服电机工作在所述第一目标工作状态;接收到所述第三信息时从所述rfid装置读取所述第六信息,并基于所述第六信息向所述步进
电机发送第二控制信号,所述第二控制信号用于控制所述步进电机工作在所述第二目标工作状态;接收到所述第四信息时对所述传感器模块采集的运行数据进行第一处理。
7.本方面中,rfid装置作为信息的载体,可以用于存储信息和读取信息;plc用于接收数据并对数据进行处理后存储到rfid装置中,还用于根据接收到的信息控制该实训系统运行,传感器模块用于采集该实训系统在运行过程中的运行数据;通过采集该实训系统运行过程中的运行数据以及对这些数据进行处理和分析,可以做到对设备运行过程中可能存在的故障进行预警。
8.结合第一方面,在第一种可能的实现方式中,所述传感器模块包括红外温度传感器、扭矩传感器和噪音传感器中一种或多种传感器;所述红外温度传感器用于测量所述步进电机在工作中的温度;所述扭矩传感器用于测量所述步进电机在工作中的扭矩;所述噪音传感器用于测量所述步进电机在工作中的噪音。
9.结合第一方面,在第二种可能的实现方式中,所述实训系统还包括气缸,所述传感器模块包括位移传感器和/或压力传感器;所述位移传感器用于测量所述气缸的高度值;所述压力传感器用于测量所述气缸承受的压力值。
10.结合第一方面,在第三种可能的实现方式中,所述实训系统还包括震动传感器,所述震动传感器用于测量所述实训系统在运行过程中的震动频率。
11.结合第一方面,在第四种可能的实现方式中,所述实训系统还包括:电能表、模拟量采集模块、温湿度仪表和触摸屏;所述电能表用于在所述实训系统的运行过程中,测量所述实训系统的用电量;所述模拟量采集模块用于在所述实训系统的运行过程中,采集所述实训系统的模拟量数据;所述温湿度仪表用于测量所述实训系统所处环境的温度和湿度;所述触摸屏用于显示所述实训系统在运行过程中的所述运行数据。
12.结合第一方面,在第五种可能的实现方式中,所述实训系统还包括:无线客户端和串口服务器,所述扫描装置包括扫码枪;所述串口服务器用于将所述扫码枪获取到的所述第一信息、所述第二信息、所述第三信息和所述第四信息发送至所述无线客户端;所述无线客户端用于将所述第一信息、所述第二信息、所述第三信息和所述第四信息发送至所述plc。
13.结合第一方面,在第六种可能的实现方式中,所述实训系统还包括:下单系统;所述下单系统用于接收所述第五信息和所述第六信息,并将所述第五信息和所述第六信息发送至所述plc。
14.结合第一方面,在第七种可能的实现方式中,所述实训系统还包括:刻度盘,所述刻度盘与所述伺服电机连接;所述刻度盘用于在所述伺服电机的控制下拨动指针。
15.结合第一方面,在第八种可能的实现方式中,所述实训系统还包括:接近传感器、推块和编码器;所述推块用于在所述步进电机的作用下进行位移;所述接近传感器用于检测所述推块的位移距离,并将所述位移距离发送至所述编码器;所述编码器用于接收所述位移距离并计算出所述推块的位置。
16.结合第一方面或上述任意一种可能的实现方式,在第九种可能的实现方式中,所述实训系统还包括:iot网关和云端平台;所述iot网关用于将所述传感器模块采集到的运行数据发送至所述云端平台;所述云端平台用于对所述运行数据进行第二处理,并显示所述第二处理得到的结果。
controller,plc)216、rj45网口217、iot网关102、温湿度仪表219、模拟量采集模块220、无线客户端221、串口服务器222、扫码枪223、扭矩传感器224、接近传感器225、刻度盘226、推块227、气缸228、二维码盘229、扫码器230、云端平台103和云平台界面218,其中,plc 216与rfid装置209、伺服电机208和步进电机215相连。
30.红外温度传感器201用于在工业互联网网络运维实训系统运行的过程中采集步进电机215的温度。
31.震动传感器202用于在工业互联网网络运维实训系统运行的过程中采集工业互联网网络运维实训台101的震动频率。
32.位移传感器203用于在工业互联网网络运维实训系统运行的过程中采集气缸228的位移大小。
33.噪音传感器204用于在工业互联网网络运维实训系统运行的过程中采集步进电机215的运转噪音,来评测步进电机的健康状况。
34.压力传感器205用于在工业互联网网络运维实训系统运行的过程中,采集在气缸228进行位移时,气缸228所承受的压力大小。
35.扭矩传感器224用于在工业互联网网络运维实训系统运行的过程中,采集步进电机的扭矩,即步进电机从曲轴端输出的力矩。在功率固定的条件下步进电机的扭矩与步进电机机转速成反比关系,转速越快扭矩越小,反之越大。
36.下单系统207用于在工业互联网网络运维实训系统运行的过程中,接收用户输入的程序指令信息,例如第五信息和第六信息,该第五信息用于指示伺服电机208的第一目标工作状态,第六信息用于指示步进电机215的第二目标工作状态;然后将该第五信息和第六信息发送至plc 216中进行处理,最后传输至rfid装置209中,供使用时读取。
37.示例性地,该下单系统207可以是一个触摸屏,用户来进行操作,输入指令,例如将刻度盘226的指针拨至用户输入的一个指定刻度,将推块227推至用户设定的预设位置等。
38.伺服电机208用于在工业互联网网络运维实训系统运行的过程中,根据从rfid装置209中读取到的第五信息,控制伺服电机208工作在第一目标状态,即伺服电机208控制刻度盘226的指针拨至指定刻度。
39.rfid装置209是一个信息的载体,其原理为阅读器与标签之间进行非接触式的数据通信,达到识别目标的目的。具体用于在工业互联网网络运维实训系统运行的过程中,记录和读取设备采集到的信息,例如各个传感器采集到的设备运行数据等。
40.触摸屏210用于在工业互联网网络运维实训系统运行的过程中直接展示部分设备的运行数据,例如,对rfid装置209读取到的信息进行呈现、对红外温度传感器201采集到的步进电机的温度进行展示等。
41.电能表211通过modbus网关212以及诸如s7通信协议的相关协议与plc 216进行数据传输,具体用于在工业互联网网络运维实训系统运行的过程中,记录该系统的电压、电量等信息。
42.变频器214用于在工业互联网网络运维实训系统运行的过程中,输入频率信息。
43.步进电机215用于在工业互联网网络运维实训系统运行的过程中,根据从rfid装置209中读取到的第六信息,控制步进电机215工作在第二目标状态,即步进电机215控制推动推块227至预设位置。
44.接近传感器225用于在工业互联网网络运维实训系统运行的过程中,检测推块227的位移距离,并将该位移距离发送至编码器213。
45.编码器213用于在工业互联网网络运维实训系统运行的过程中,接收接近传感器225发送的位移距离并计算出推块227的位置。
46.plc 216是可编程逻辑控制器,里面写有plc程序,plc用来控制设备,进行一些逻辑动作的处理,即根据一些信号的反应来进行设备的处理;具体用于在工业互联网网络运维实训系统运行的过程中,在接收到第一信息时获取第五信息和第六信息,并将第五信息和第六信息写入rfid装置209;接收到第二信息时从rfid装置209读取第五信息,并基于第五信息向伺服电机208发送第一控制信号,该第一控制信号用于控制伺服电机208工作在第一目标工作状态;接收到第三信息时从rfid装置209读取第六信息,并基于该第六信息向步进电机215发送第二控制信号,该第二控制信号用于控制步进电机215工作在第二目标工作状态;接收到第四信息时对采集到的运行数据进行第一处理。
47.温湿度仪表219用于在工业互联网网络运维实训系统运行的过程中,采集该实训系统所处环境的温度和湿度。
48.模拟量采集模块220用于在工业互联网网络运维实训系统运行的过程中,采集该实训系统的模拟量数据。
49.二维码盘229用于以二维码的形式记录第一信息、第二信息、第三信息和第四信息,该第一信息用于指示plc 216获取伺服电机208和步进电机215的目标工作状态,该第二信息用于指示plc 216控制伺服电机208工作,该第三信息用于指示plc 216控制步进电机215工作,该第四信息用于指示plc 216对各个传感器采集到的运行数据进行处理。
50.无线路由器206用于在工业互联网网络运维实训系统运行的过程中,发射无线信号,且可以与无线客户端221通过无线通信的方式进行数据传输。
51.扫码枪223用于在工业互联网网络运维实训系统运行的过程中,扫描二维码盘229上的二维码,获取第一信息、第二信息、第三信息和第四信息。
52.串口服务器222用于在工业互联网网络运维实训系统运行的过程中,将扫码枪223扫码获取到的第一信息、第二信息、第三信息和第四信息通过rj45网口传输给无线客户端221。
53.无线客户端221用于在工业互联网网络运维实训系统运行的过程中,通过无线路由器206发射的无线信号与plc 216进行数据传输,即将第一信息、第二信息、第三信息和第四信息发送至plc 216。
54.扫码器230也用于在工业互联网网络运维实训系统运行的过程中,扫描二维码盘229上的二维码,获取第一信息、第二信息、第三信息和第四信息。
55.其中,无线路由器206、下单系统207、伺服电机208、rfid装置209和触摸屏210通过rj45网口217与plc 216之间进行数据通信。
56.iot网关102是连接感知网络与传统通信网络的纽带。作为网关设备,iot网关可以实现感知网络与通信网络,以及不同类型感知网络之间的协议转换,既可以实现广域互联,也可以实现局域互联。此外iot网关还具备设备管理功能,运营商通过iot网关设备可以管理底层的各感知节点,了解各节点的相关信息,并实现远程控制。具体用于在工业互联网网络运维实训系统运行的过程中,作为一个桥梁,将采集到的运行数据传输到云端平台103。
57.云端平台103用于对采集到的运行数据进行第二处理,并通过云平台界面218显示第二处理得到的结果。
58.基于以上工业互联网网络运维实训系统网络拓扑图,可以得到如图3所示的工业互联网网络运维实训台的结构示意图。
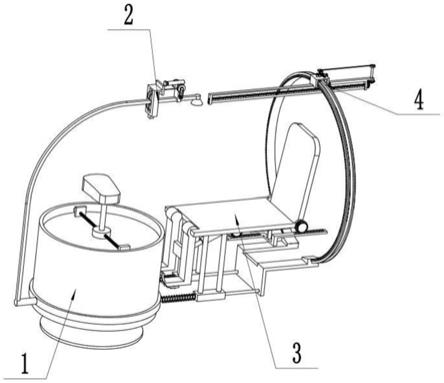
59.如图3所示,工业互联网网络运维实训台101包括编码器213、噪音传感器204、接近传感器225、扭矩传感器224、步进电机215、压力传感器205、气缸228、推块227、红外温度传感器201、位移传感器203、伺服电机208、刻度盘226、rfid装置209、扫码器230和二维码盘229。
60.其中,伺服电机208与刻度盘226相连,步进电机215与推块227、红外温度传感器201和扭矩传感器224均相连,扭矩传感器224与接近传感器225相连,接近传感器225与噪音传感器204相连,噪音传感器204与编码器213相连,编码器213与推块227相连,压力传感器205与气缸228相连,位移传感器203与气缸228相连,扫码器230与rfid装置209相连。
61.基于图3所示的工业互联网网络运维实训台,工业互联网网络运维实训系统在运行的过程中,可以分为以下四个步骤,具体如图4所示。
62.s401,plc控制rfid装置读取信息和扫码装置扫码。
63.该步骤中,plc 216在工业互联网网络运维实训系统启动后,向下单系统207发送请求(例如生产报表请求),并接收下单系统207下发的订单,然后将该订单信息进行处理后写入rfid装置209中,其中,该订单信息包括第五信息和第六信息,第五信息用于指示伺服电机208的第一目标工作状态,第六信息用于指示步进电机215的第二目标工作状态。
64.示例性地,该订单可以指示需要生产的产品的形状等信息。
65.plc 216控制扫码器230扫描二维码盘229中的任意一个二维码和rfid装置209读取存储在rfid装置209中的订单信息。其中,二维码盘229中有四个二维码,分别记录有第一信息、第二信息、第三信息和第四信息,该第一信息用于指示plc 216获取伺服电机208和步进电机215的目标工作状态,该第二信息用于指示plc 216控制伺服电机208工作,该第三信息用于指示plc 216控制步进电机215工作,该第四信息用于指示plc 216对实训系统中的传感器采集到的运行数据进行处理。
66.示例性地,伺服电机208和步进电机215的目标工作状态指的是伺服电机208控制刻度盘226的指针拨至指定刻度和步进电机215控制推块227平移至预设位置。
67.可以理解的是,扫码器230与rfid装置209是通过有线连接的,扫码装置还可以包括扫码枪。
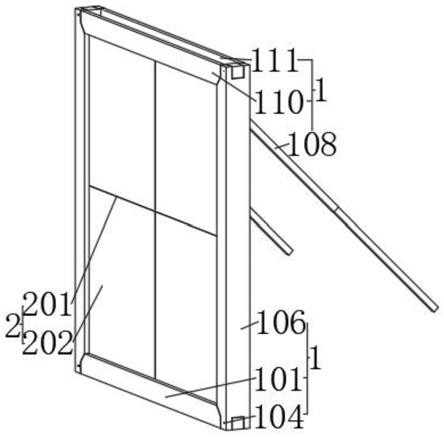
68.作为一种可选的实施方式,利用如图2所示的扫码枪223进行扫码获取第一信息、第二信息、第三信息和第四信息,串口服务器222将扫码枪223获取到的第一信息、第二信息、第三信息和第四信息发送至无线客户端221;无线客户端221通过无线通信将第一信息、第二信息、第三信息和第四信息发送至plc 216中。
69.s402,plc控制伺服电机进行拨针处理。
70.该步骤中,plc 216在接收到第二信息时从rfid装置209中读取第五信息,并基于该第五信息向伺服电机208发送第一控制信号,控制伺服电机208工作在第一目标工作状态,即伺服电机208控制刻度盘226的指针拨至指定位置,同时采集此时伺服电机208的设备数据,例如伺服电机208的转速。
71.s403,plc控制步进电机进行推块处理。
72.该步骤中,plc 216在接收到第三信息时从rfid装置209中读取第六信息,并基于该第六信息向步进电机215发送第二控制信号,控制步进电机215工作在第二目标工作状态,即步进电机215推动推块227至预设位置,在推动推块227的过程中,接近传感器检测推块227的位移距离,并将该位移距离发送至编码器213,编码器213根据该位移距离计算推块227的位置,红外温度传感器201采集步进电机215的温度,扭矩传感器224和噪音传感器204采集步进电机215的扭矩及运转噪音,以便及时对步进电机215进行健康管理。
73.s404,plc进行数据处理。
74.该步骤中,plc 216在收到第四信息时对在该实训系统运行过程中采集到的运行数据进行处理,其中,运行数据包括伺服电机208的设备数据、推块227的位置、步进电机215的温度、步进电机215的扭矩及运转噪音等,对运行数据的处理包括将运行数据进行格式变换、检索、加工等。
75.可选地,工业互联网网络运维实训系统在运行过程中的运行数据还包括plc 216控制位移传感器203上下移动测量得到的气缸228的高度和压力传感器205测量得到的气缸承受的压力大小。
76.最终,将以上实训系统的运行数据进行处理后写入rfid装置209中。
77.以上四个步骤执行完成后,将写入rfid装置209中的设备运行数据通过iot网关102传输至云端平台103,即工业互联网网络运维iot平台系统和工业互联网网络运维云平台系统,对采集到的设备运行数据进行进一步处理,最终得到如图5所示的云平台界面图,里面可以展示iot数据采集的信息和plc数据采集的信息,例如,图5中显示当前电能表的电度为0.9度、总电量为0.94度、电压和时间的关系图、模拟量采集模块的状态信息(例如状态为开)、状态等级和时间的关系、温湿度仪表的数据,以及该工业互联网网络运维实训系统在运行过程中的电压的最大值、最小值和标准值,电流的最大值、最小值和标准值以及有功功率值的最大值、最小值和标准值等信息。
78.用户可以根据该平台界面展示的信息获得该工业互联网网络运维实训系统在运行过程中的运维数据和工况数据,以及这些数据的变化情况,根据历史存储数据对其进行趋势分析,最终达到对设备运行过程中可能存在的故障进行预警、故障信息的提示等效果。
79.本技术的工业互联网网络运维实训系统基于工控机、plc、智能网关等硬件,融入了感知、采集、控制、通讯、分析、云端和安全等关键技术,将工业场景还原至实训台,能够作为工业互联网人才培养的技术载体,该系统还可以做一些协议通信、协议解析、数据应用等相关的测试与验证,满足用户在工业互联网网络运维实训过程中全流程参与互动的最佳体验,以供学习者学习理论知识并提高动手实操技能,能够培养社会端需求工业互联网人才。
80.应理解,本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况,其中a,b可以是单数或者复数。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系,但也可能表示的是一种“和/或”的关系,具体可参考前后文进行理解。
81.本技术中,“至少一个”是指一个或者多个,“多个”是指两个或两个以上。“以下至少一项(个)”或其类似表达,是指的这些项中的任意组合,包括单项(个)或复数项(个)的任意组合。例如,a,b或c中的至少一项(个),可以表示:a,b,c,a
‑
b,a
‑
c,b
‑
c,或a
‑
b
‑
c,其中a,
b,c可以是单个,也可以是多个。
82.应理解,在本技术的各种实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
83.本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本技术的范围。
84.所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
85.在本技术所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
86.所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
87.另外,在本技术各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
88.所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本技术各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、只读存储器、随机存取存储器、磁碟或者光盘等各种可以存储程序代码的介质。
89.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。