一种自动化集装箱码头agv的快速轨迹跟踪控制方法
技术领域
1.本发明涉及自动化集装箱码头agv领域,具体涉及自动化集装箱码头agv 的轨迹跟踪控制领域。
背景技术:
2.在经济全球化的大背景下,集装箱码头吞吐量大幅增长,相应地,集装箱码头作业强度也在不断地增加。同时,也加快了集装箱码头向自动化、智能化的方向的发展。码头是水上运输与陆上运输的交接点,码头的作业区域一般可以分为近岸作业区、水平运输区和堆场作业区,其中具有中转作用的水平运输区的运输设备由传统码头的集卡转化为自动导引车、地面自主车和自动跨运车组成。自动化码头中agv(automated guided vehicle,自动导引车)的集装箱搬运成为其中关键一环,通常装备有电磁或光学等自动导引装置,能沿规定的导引路径行驶,将集装箱从一个堆场区域搬运到岸桥区域。沿途需保证行驶轨迹正确,路线选择精确,避免车与车之间相撞等诸多要求,从而使集装箱码头的作业效率提升。放眼全球的集装箱码头,agv是水平运输设备中使用率最高的,其优势体现在自动化、智能化和环保性。agv的作业过程是接收远程的调度指令,跟踪预定的路线,完成货物运输的过程。因此,agv的路径跟踪精度会影响整个码头运转的效率。高精度的路径跟踪技术作为agv的关键技术,一直是研究的热点。因此设计出一种高精度的轨迹跟踪算法,对集装箱自动化码的工作效率的提升有显著意义。
技术实现要素:
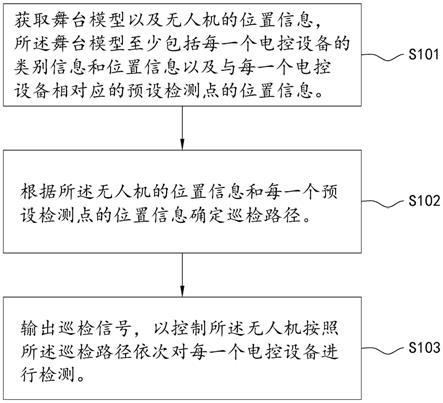
3.为提供一种可应用在智能港口、自动化集装箱码头场景下,水平运输设备 agv的高精度轨迹跟踪控制方法,本发明提供一种自动化集装箱码头agv的轨迹跟踪控制方法。为实现上述目的,本发明的技术方案为:一种自动化集装箱码头agv的快速轨迹跟踪控制方法,包括以下步骤:
4.s1、建立agv的运动学模型;
5.s2、利用滑模控制方法,设计agv的真实输入,使该agv的输出轨迹能够跟踪上期望轨迹。
6.其中,所述的步骤s1中,进一步的包含以下步骤:
7.s11、推导agv的运动学轨迹;
8.s12、推导出agv的当前姿态与期望姿态之间的误差系统。
9.其中,所述的步骤s12中,进一步的包含以下步骤:
10.s121、计算agv的当前姿态与期望姿态之间的误差变量p
e
=[x
e y
e θ
e
]
t
,其中x
e
表示在全局坐标系中,agv的当前姿态和期望姿态之间的横向坐标误差,y
e
表示在全局坐标系中,agv的当前姿态和期望姿态之间的纵向坐标误差,θ
e
表示在全局坐标系中,agv的当前姿态和期望姿态之间的方向误差;
[0011]
s122、对所述误差变量p
e
求导,计算agv的当前姿态与期望姿态之间的误差系统。
[0012]
其中,所述的步骤s2中,进一步的包含以下步骤:
[0013]
s21、针对步骤s122所述的误差系统,设计滑模面s;
[0014]
s22、基于步骤s21所述的滑模面s,设计agv的真实输入。
[0015]
其中,所述的步骤s22中,进一步的包含以下步骤:
[0016]
s221、基于步骤s21所述的滑模面s,设计滑模控制器;
[0017]
s222、基于步骤s221所述的滑模控制器,设计agv的真实输入。
[0018]
其中,所述的滑模面s为其中s
11
表示滑模面s的第一元素,s
21
表示滑模面s的第二元素,v
d
表示agv的期望前进速度。
[0019]
其中,所述的agv实际输入为其中v表示agv的当前的前进速度,δ表示agv的前轮转向角,ω表示agv中控制点c的瞬时角速度,l表示agv的车辆轴距,k1和α1为正常数。
[0020]
其中,所述控制点c是该agv的中轴线和后轮中心连线的交点。
[0021]
其中,所述α1是0~1范围内的常数。
[0022]
其中,所述agv当前前进速度v满足v>0,所述转向角δ在
‑
0.5~0.5rad 范围内。
[0023]
本发明首先引入了agv的运动学模型,并结合误差变量,得到误差系统模型。针对误差系统模型设计一种新的滑模面。基于此,设计滑模控制器使误差变量收敛到原点从而完成期望轨迹的跟踪,提供了一种高精度的agv轨迹跟踪控制方法,有利于提升集装箱自动化码头的工作效率。
附图说明
[0024]
图1为本发明的一种自动化装箱码头agv的简化物理模型;
[0025]
图2为本发明实施例中agv轨迹误差变量收敛图;
[0026]
图3为本发明实施例中agv的实际控制输入图;
[0027]
图4为本发明实施例中agv的轨迹跟踪效果图。
具体实施方式
[0028]
以下结合附图,通过以下实施例对本发明的技术内容和所达成目的做详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0029]
一种自动化集装箱码头agv(自动导引车)的快速轨迹跟踪控制方法,包括以下步骤:
[0030]
s1、建立agv的运动学模型;
[0031]
s11、推导agv运动的运动学轨迹;
[0032]
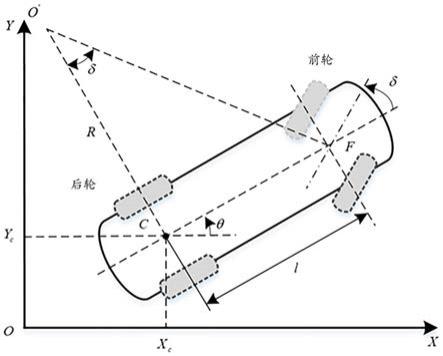
自动化码头中agv的前轮是转向轮,后轮负责驱动,其结构如图1所示。在全局坐标系(xoy)中,通过agv自身的传感器可以获得其位置和角度信息,并使用p
c
来描述该agv的位姿,p
c
=[x
c y
c θ]
t
。其中x
c
和y
c
表示所述agv的控制点c在全局坐标系中的横坐标和纵坐标,
该控制点c是所述agv的中轴线和后轮中心连线的交点,θ表示从x轴逆时针取正方向的车辆的方向。
[0033]
分别画直线fo
′
和co
′
垂直于前轮和后轮,且f点在agv的中轴线上,与控制点c的距离为l,l为车辆轴距,则fo
′
和co
′
的交叉点o
′
是agv的瞬时滚动中心,直线fo
′
和co
′
的夹角为δ。agv的运行半径r即为co
′
,其计算公式为r=l/tanδ,在本实施例中,l为5米,δ为前轮转向角(定义左转为正向转向)。在低速条件下,agv中控制点c的瞬时角速度因此其中 v为控制点c的前进速度,意为对θ求导。以下内容中,相同的符号均为相同的数学操作,即为对x
c
求导,为对y
c
求导,等等,故不再赘述。可推导出agv运动的运动学轨迹为:
[0034][0035]
s12、推导agv的当前姿态与期望姿态之间的误差系统;
[0036]
s121、计算agv的当前姿态与期望姿态之间的误差变量p
e
;
[0037]
设定agv的期望姿态p
d
=[x
d y
d θ
d
]
t
,其中x
d
和y
d
分别表示agv在全局坐标系中需要到达的期望横坐标和期望纵坐标,θ
d
表示agv在期望坐标时的期望方向;考虑到agv的轨迹跟踪控制问题,agv的当前姿态p
c
需要追踪上期望姿态 p
d
,根据几何关系,可以得到当前姿态p
c
与期望姿态p
d
之间的误差变量p
e
:
[0038][0039]
其中,x
e
、y
e
和θ
e
分别是在全局坐标系中,agv的期望轨迹与实际轨迹之间在横向位置、纵向位置以及前进方向上的偏差。
[0040]
s122、计算agv的当前姿态与期望姿态之间的误差系统;
[0041]
对所述误差变量p
e
求导数,可得到如下误差系统:
[0042][0043]
其中,v
d
、δ
d
和分别表示agv的期望前进速度、期望转向角和期望角速度。
[0044]
本发明只考虑前向运动,即v>0的情况,且转向角δ和偏航角θ分别限制在 [
‑
0.5,0.5]rad和(
‑
π,π]范围内,并假设|θ
e
|<π的情况。本实施例中,agv 的期望前进速度为2m/s,期望角速度为0.4rad/s。
[0045]
s2、利用滑模控制方法,设计agv的真实输入;
[0046]
s21、针对所述误差系统,设计滑模面;
[0047]
agv的实际控制输入应为前进速度v和转向角δ,输出为当前姿态p
c
。轨迹跟踪问题现在转换为找到一个合适的输入向量u=[vδ]
t
,使所述误差变量p
e
收敛到零,则输出姿态p
c
为期望姿态p
d
。
[0048]
由于ω=v/r=v/l
·
tanδ和ω
d
=v
d
/r=v
d
/l
·
tanδ,可将所述误差系统转化为:
[0049][0050]
针对上述转化后的误差系统设计如下滑模面:
[0051][0052]
其中该滑模面s为一向量,s
11
和s
21
为构成该向量的两个元素。对所述滑模面s 求导,即对向量中的两个元素s
11
和s
21
分别求导,可以得到:
[0053][0054]
其中,f=tanh(v
d
y
ε
)。结合所述转化后的误差系统,可得到如下滑模面:
[0055][0056]
s22、基于s21中的滑模面,设计滑模控制器,进而设计agv的真实输入;
[0057]
s221、基于上述滑模面设计如下滑模控制器:
[0058][0059]
在本实施例中,取k1=10,k2=0.8,α1=97/99。
[0060]
s222、由于ω=v/r=v/l
·
tanδ,则设计的滑模控制器[vω]
t
可以转化为 agv的实际输入[vδ]
t
:
[0061][0062]
s23、证明所述一种自动化集装箱码头agv的快速轨迹跟踪控制方法能够实现 agv的快速高精度轨迹跟踪:选择合适的lyapunov(李雅普诺夫)函数,使得所述误差系统在有限时间内到达所述滑模面s,即所述误差变量在有限时间内沿着滑模面收敛到原点;
[0063]
s231、选择一个lyapunov函数
[0064]
对所选lyapunov函数求导,并将所述滑模面带入,可得:
[0065][0066]
其中,k=min{k1,k2}。
[0067]
根据上述推导公式,可知滑模面s可以在有限时间内收敛到零,假设滑模面在时间t1处收敛到零,则在时间t1之后,即在时间t>t1时,s=0;通过滑模面s的定义,可得到x
e
=0。
[0068]
s232、进一步的,选择一个lyapunov函数
[0069]
对所选函数v2求导,并将误差系统的定义带入,可得
[0070][0071][0072]
在步骤s231的所述有限时间t1之后,滑模面s中s
21
=0,即θ
e
tanh(v
d
y
e
)=0,所以可得到θ
e
=
‑
tanh(v
d
y
e
);因此,进一步的,可得到所以纵向位置偏差y
e
趋于0时,前进方向的偏差θ
e
也会趋于零,从而实现所有的误差变量收敛,达到agv跟踪上期望轨迹的目的。
[0073]
最后,对本实施例进行数字仿真,结果如图2~图4所示,展示了本实施例中,agv可以快速的完成轨迹跟踪。
[0074]
以上所述仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。