1.本发明属于养殖技术领域,尤其涉及一种高密度养殖循环系统。
背景技术:
2.水产养殖业是我国渔业的重要组成部分,也是渔业发展的主要增长点。我国的渔业发展重心已由“捕捞为主”向“养殖为主”的转移,促使水产养殖业发生了巨大变化。目前的水产养殖大多数均为高密度养殖,高密度养殖对于水体条件、养殖条件等都有较高的要求,但是目前的养殖系统并不能很高地满足养殖所需的条件,导致部分鱼类死亡,造成养殖户的损失。
技术实现要素:
3.本发明的目的在于提供一种高密度养殖循环系统,以解决目前的养殖系统并不能很高地满足养殖所需的条件,导致部分鱼类死亡,造成养殖户的损失的问题。
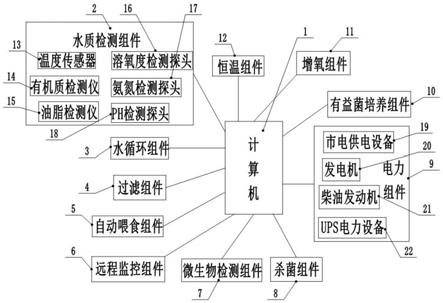
4.为了达到上述目的,本发明的技术方案为:一种高密度养殖循环系统,包括计算机以及与计算机连接的恒温组件、水循环组件、增氧组件、电力组件、水质检测组件、自动喂食组件、远程监控组件、微生物检测组件、过滤组件、有益菌培养组件和杀菌消毒组件;所述电力组件用于给其他组件供电,所述水质检测组件用于检测养殖池内的温度、氧气含量、氨氮含量、有机质含量、ph值和油脂含量,并将检测结果发送给计算机;所述计算机根据检测结果控制相应的组件;所述恒温组件用于保证养殖池内的温度;所述水循环组件用于对养殖池内的水进行循环;所述增氧组件用于保证养殖池内的氧气;所述有益菌培养组件用于向养殖池内添加用于恢复水质的菌种,所述有益菌培养组件内培养有若干菌种;所述远程监控组件用于监控所述养殖池内的吃食情况并将吃食情况反馈给计算机,所述自动喂食组件根据计算机的指令进行喂食;所述过滤组件设于水循环组件中,用于过滤水循环中的杂质和悬浮物;所述微生物检测组件用于检测养殖池内的微生物含量并将检测结果发送给计算机,所述杀菌消毒组件根据计算机的指令进行杀菌处理;所述自动喂食组件能够判断养殖池内鱼群的规格并发送给计算机,并在计算机的控制下进行自动喂食。
5.进一步,所述水质检测组件包括温度传感器、溶氧度检测探头、氨氮检测探头、有机质检测仪、ph检测探头和油脂检测仪;所述恒温组件采用加热器,所述增氧组件采用曝气机;所述有益菌培养组件包括若干培养桶,所述培养桶底部设有用于排出有益菌的第一电磁阀,所述第一电磁阀与计算机连接。
6.进一步,所述自动喂食组件包括智能投喂机,所述远程监控组件还能够养殖池内鱼群的情况进行监控;所述远程监控组件包括若干组摄像机组,若干组所述摄像机组用于拍摄对应养殖池内的情况并传输给计算机;所述计算机能够对拍摄的照片进行处理,并根据处理后的结果控制智能投喂机进行投喂;所述智能投喂机用于对若干个养殖池进行投喂食物,所述智能投喂机能够识别养殖池的池号;喂食方法包括以下步骤:
7.s1:在计算机中搭建深度学习网络结构模型并进行训练,用于判断鱼群的进食方
式、鱼群的规格,规格包括尺寸大小或重量;训练完成后投入使用;所述计算机内存贮有投喂指南,所述投喂指南中按照鱼群的进食方式和鱼群的规格对应有食物的种类和投喂量;
8.s2:摄像机组对对应的养殖池进行拍照,并将照片发送给计算机进行处理,计算机判断出各个养殖池内鱼群的规格;
9.s3:试喂食时,智能投喂机分别行走到各个养殖池的位置,并识别对应养殖池的池号,将识别的池号发送给计算机,计算机将试喂食的指令发送给智能投喂机,智能投喂机根据指令向对应的养殖池内投入试喂食量的饲料;摄像机组对对应的养殖池内鱼群进食的照片进行拍照,并发送给计算机;计算机根据照片分析鱼群的进食方式;
10.s4:计算机根据各个养殖池的鱼群规格和进食方式判断出各个养殖池里鱼群的投喂量,然后根据投喂量判断第一次喂食量,然后计算机驱动智能投喂机给各个养殖池投喂第一次喂食量的食物;
11.s5:摄像机组对养殖池内的吃食情况进行监控,当吃食情况达到需要添加食物的时候,计算机向智能投喂机下达指令,给相应的养殖池添加食物,食物的添加量根据投喂指南中的投喂量进行计算;
12.s6:摄像机组在对对应的养殖池进行拍照的过程中,计算机会实时地对鱼群的规格进行监控,若鱼群的规格属于投喂指南的下一个阶段时,计算机会在下一次喂食时,向智能投喂机下达相应规格的食物和相应的添加量。
13.进一步,所述智能投喂机包括机体、控制器以及与控制器连接的行走机构和识别机构;各个养殖池上设有轨道,所述行走机构设于机体的下方,所述行走机构能够带动机体在轨道上行走;所述机体内设有若干用于存储不同食物的容纳腔,每个所述容纳腔的出口处均设有与控制器连接的第二电磁阀,所述计算机与控制器连接;所述远程监控组件将拍摄的数据发送给所述计算机进行处理,每个所述养殖池上均设有对应识别二维码,所述识别机构用于识别识别二维码,所述控制器能够将识别机构识别的识别二维码转化成对应养殖池的池号发送给计算机;所述计算机对养殖池内的吃食情况进行判断。
14.进一步,对所述深度学习网络结构模型进行异物判断训练和吃食情况判断训练,用于判断养殖池内的异物和吃食情况;所述摄像机组能够对养殖池表面的情况进行拍摄并将拍摄图像发送给计算机;所述计算机与手机客户端连接,能够向手机客户端发送养殖池的情况;所述计算机能够进行分析并能够将产生异物的养殖池的池号发送至手机客户端,通知手机客户端进行处理;所述计算机能够进行分析并能够向智能投喂机发送投食指令,投食指令包括池号、食物量和食物种类。
15.进一步,所述摄像机组包括第一摄像机,在步骤s2中,判断鱼群规格的方式为:
16.s21:获取图像:每个养殖池内均安装有2个第一摄像机,分别从左右两个方向获取鱼体图像;
17.s22:判断鱼群尺寸大小:计算机根据第一摄像机在一段时间内拍摄的图像,判断各图像内各个鱼体的尺寸,并对各个鱼体的尺寸进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群尺寸大小;
18.s23:判断鱼群重量大小:当步骤s22中鱼群尺寸大小达到投喂指南设定的类别大小时,计算机根据步骤s22中第一摄像机拍摄的图像,判断图像内各个鱼体的重量;并对各个鱼体的重量进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群重量。
19.s24:若步骤s22中鱼群尺寸大小未达到投喂指南设定的类别大小时,则根据鱼群尺寸大小进行规格的判断;若步骤s22中鱼群尺寸大小达到投喂指南设定的类别大小时,则根据鱼群重量进行规格的判断。
20.进一步,所述摄像机组包括第二摄像机,在各个养殖池的上方安装第二摄像机,第二摄像机用于获取养殖池表面的图像;所述计算机根据第二摄像机获取的图像进行异物的识别、吃食情况的判断以及根据第一摄像机和第二摄像机的图像进行鱼群的进食方式的识别。
21.进一步,所述电力组件包括市电供电设备、发电机、柴油发动机和ups电力设备,所述柴油发动机用于给发电机进行供电。
22.进一步,所述计算机能够形成各个养殖池的任务指令,计算机将任务指令和对应的池号发送给手机客户终端;每个所述养殖池上均设有对应的任务二维码,所述手机客户端能够通过扫描所述任务二维码消除对应的任务指令;消除对应的任务指令时需要上传现场拍摄照片。
23.进一步,所述第一次喂食量为对应投喂量的二分之一,所述添加量为对应投喂量的四分之一。
24.本技术方案的工作原理在于:
25.根据鱼群的进食方式,可以分为以下几类别:
①
摄吸式:深海鱼居多,多生活在底层,嘴巴尖圆或是钝圆,靠的是目标物接近的时候,猛烈张口造成强劲水流吸入标的物。
②
掠食式:掠食性鱼群,属于凶猛类群体,以游速快、视力好、活饵为食为特性,因此天性便会恃强凌弱、穷追不舍其他幼小鱼群进行捕食,故吃食时总是使水面翻涌、水体激烈四处窜动,鲈鱼便是属于这种。
③
啃食式:鲫鱼、鲤鱼,便类似此种,吃食情况相对温和,会持续不断的吃食、啃食。
④
滤食式:滤食性鱼类以浮游生物爲食,利用鱼鳃过滤,而后将食物逐渐送入食道,以鳙、鲢类鱼为代表。
26.在各个养殖池内放入同一种类别且同一规格的小鱼苗,第一摄像机对养殖池内的鱼群进行拍照,计算机根据第一摄像机在一段时间内拍摄的图像,判断各图像内各个鱼体的尺寸,并对各个鱼体的尺寸进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群尺寸大小。若鱼群尺寸大小未达到投喂指南设定的类别大小(可通过计算机在投喂指南中进行设置)时,则根据鱼群尺寸大小进行规格的判断;若步骤s22中鱼群尺寸大小达到投喂指南设定的类别大小时,计算机根据第一摄像机拍摄的图像,判断图像内各个鱼体的重量;并对各个鱼体的重量进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群重量,并根据鱼群重量进行规格的判断。并将该鱼群规格与摄像机组对应的养殖池的池号对应起来。
27.然后进行试喂食,计算机控制智能投喂机在轨道上行走,智能投喂机在每个养殖池内投入一小部分食物(根据饲养人员的经验得出,例如50g),第二摄像机和第一摄像机对鱼群的进食方式进行拍照,计算机对照片进行处理,从而判断鱼群的类别,并将该类别与摄像机组对应的养殖池的池号对应起来。
28.现在就得到了每个养殖池的鱼群规格和进食方式,计算机根据鱼群规格和进食方式匹配到投食指南中的食物种类和投喂量。根据投喂量的二分之一进行第一次喂食,每次喂食时,智能投喂机的识别机构会先扫描该养殖池的识别二维码,并将识别的信息通过控制器发送给计算机,计算机根据该信息向智能投喂机下达食物种类和第一次喂食量的指
令。
29.第二摄像机对养殖池内的吃食情况进行监控,当吃食情况达到需要添加食物的时候,计算机向智能投喂机下达指令,给相应的养殖池添加食物,食物的添加量根据投喂指南中的投喂量进行计算,具体为投喂量的四分之一。
30.摄像机组在对对应的养殖池进行拍照的过程中,计算机会实时地对鱼群的规格进行监控,若鱼群的规格属于投喂指南的下一个阶段时,计算机会在下一次喂食时,向智能投喂机下达相应规格的食物和相应的添加量。
31.第二摄像机会对养殖池表面进行拍照,计算机对图像进行分析,若识别处养殖池表面出现异物,会形成任务指令,计算机将任务指令和对应的池号发送给手机客户终端。养殖户到达该养殖池后,对异物进行处理,并进行拍照,然后扫描任务二维码,在任务指令中上传拍摄的照片,从而消除该任务指令。
32.电力组件为各组件进行供电,首选市电进行供电。在市电断电时,计算机启动发电机,发电机为鱼群养殖设备进行供电。在发电机无法启动时,通过柴油发动机带动发电机启动,发电机为鱼群养殖设备进行供电。在发电机、柴油发动机均无法启东时,采用ups电力设备进行供电。
33.各组件在计算机和电力组件的作用下为鱼群提供生存所需的条件。水质检测组件用于检测养殖池内的温度、氧气含量、氨氮含量、有机质含量、ph值和油脂含量,微生物检测组件用于检测养殖池内的微生物含量,并将检测结果发送给计算机,计算机根据检测结果对恒温组件、增氧组件、水循环组件、有益菌培养组件、杀菌消毒组件进行控制,以保证水质。当温度传感器感应到水体温度比较低,计算机会启动加热器,加热器对水体进行加热,直至达到预先设定的温度。当溶氧度检测探头检测到水体内的氧气不足时,计算机打开曝气机进行一定时间的曝气。当氨氮检测探头、有机质检测仪、ph检测探头和油脂检测仪检测到水体中氨氮、有机质、ph值和油脂含量不符合要求时,计算机则启动对应培养桶的第一电磁阀,使得相应的菌种对水质进行处理。通过微生物检测传感器实时测量水体微生物情况,当水体有害微生物含量过高时,计算机立即开启紫外线杀菌器进行杀毒处理。
34.同时远程监控组件会对养殖池内的吃食进行监控,保证水面上不会存留残饵影响水质,计算机打开第二电磁阀,容纳腔内的食物会投入到养殖池内。
35.本技术方案的有益效果在于:
①
本技术方案不需要人工对养殖池内的鱼群种类、规格和重量进行辨别或识别,有摄像机组进行识别,减少了人工的任务量,提高了识别的准确性和智能性。
②
不同规格的鱼群会分开喂养,为鱼群的生长环境提供保证。
③
智能投喂机能够实现不同种类的食物和食物量的控制,减少了人工的任务量。
④
第二摄像机能够对养殖池表面的异物进行监控,避免异物对鱼群的生长产生影响。
⑤
设置任务二维码,使得养殖户只有在到达该鱼池的位置才能够实现任务消除,否则任务指令会一直存在,从而对养殖户有了一定的提醒和督促的效果。
⑥
通过打开不同容纳腔的第二电磁阀,能够向养殖池内投入相应种类的食物,通过控制第二电磁阀的打开时间,从而能够控制投喂的食物量。
⑦
设置恒温组件、水循环组件、增氧组件、电力组件、水质检测组件、自动喂食组件、远程监控组件、微生物检测组件、过滤组件、有益菌培养组件和杀菌消毒组件,从而保证水体条件和养殖条件,保证鱼群的养殖环境,以及能够减少人工的工作量。
⑧
设置多种供电方式,为各组件的正常运行提供保证,避免各组件中断造成鱼群的死亡。
附图说明
36.图1为本发明一种高密度养殖循环系统的连接图;
37.图2为喂食方法的流程图。
具体实施方式
38.下面通过具体实施方式进一步详细说明:
39.说明书附图中的附图标记包括:计算机1、水质检测组件2、水循环组件3、过滤组件4、自动喂食组件5、远程监控组件6、微生物检测组件7、杀菌消毒组件8、电力组件9、有益菌培养组件10、增氧组件11、恒温组件12、温度传感器13、有机质检测仪14、油脂检测仪15、溶氧度检测探头16、氨氮检测探头17、ph检测探头18、市电供电设备19、发电机20、柴油发动机21、ups电力设备22。
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.实施例基本如附图1所示:一种高密度养殖循环系统,包括计算机1以及与计算机1连接的恒温组件12、水循环组件3、增氧组件11、电力组件9、水质检测组件2、自动喂食组件5、远程监控组件6、微生物检测组件7、过滤组件4、有益菌培养组件10和杀菌消毒组件8。
42.电力组件9用于给其他组件供电,电力组件包括市电供电设备19、发电机20、柴油发动机21和ups电力设备22,柴油发动机21用于给发电机20进行供电。
43.水质检测组件2用于检测养殖池内的温度、氧气含量、氨氮含量、有机质含量、ph值和油脂含量,并将检测结果发送给计算机1,水质检测组件2包括温度传感器13、溶氧度检测探头16、氨氮检测探头17、有机质检测仪14、ph检测探头18和油脂检测仪15;计算机1根据检测结果控制相应的组件。恒温组件12用于保证养殖池内的温度,恒温组件12采用加热器。水循环组件3用于对养殖池内的水进行循环;过滤组件4设于水循环组件3中,用于过滤水循环中的杂质和悬浮物,过滤组件4采用物理过滤器。增氧组件11用于保证养殖池内的氧气,增氧组件11采用曝气机。有益菌培养组件10用于向养殖池内添加用于恢复水质的菌种,有益菌培养组件10内培养有若干菌种;具体地有益菌培养组件10包括若干培养桶,培养桶底部设有用于排出有益菌的第一电磁阀,第一电磁阀与计算机1连接。
44.远程监控组件6用于监控养殖池内的吃食情况并将吃食情况反馈给计算机1,自动喂食组件5根据计算机1的指令进行喂食;微生物检测组件7用于检测养殖池内的微生物含量并将检测结果发送给计算机1,微生物检测组件7采用微生物检测传感器,杀菌消毒组件8根据计算机1的指令进行杀菌处理,杀菌消毒组件8采用紫外线杀菌器;自动喂食组件5能够判断养殖池内鱼群的规格并发送给计算机1,并在计算机1的控制下进行自动喂食。
45.自动喂食组件5包括智能投喂机,远程监控组件6还能够养殖池内鱼群的情况进行监控;远程监控组件6包括若干组摄像机组,每组摄像机组包括第一摄像机和第二摄像机,若干组摄像机组用于拍摄对应养殖池内的情况并传输给计算机1;计算机1能够对拍摄的照片进行处理,并根据处理后的结果控制智能投喂机进行投喂;智能投喂机用于对若干个养殖池进行投喂食物,智能投喂机能够识别养殖池的池号;如图2所示,喂食方法包括以下步
骤:
46.s1:在计算机1中搭建深度学习网络结构模型并进行训练,用于判断鱼群的进食方式、鱼群的规格,规格包括尺寸大小或重量;训练完成后投入使用;计算机1内存贮有投喂指南,投喂指南中按照鱼群的进食方式和鱼群的规格对应有食物的种类和投喂量;
47.s2:摄像机组对对应的养殖池进行拍照,并将照片发送给计算机1进行处理,计算机1判断出各个养殖池内鱼群的规格;
48.s3:试喂食时,智能投喂机分别行走到各个养殖池的位置,并识别对应养殖池的池号,将识别的池号发送给计算机1,计算机1将试喂食的指令发送给智能投喂机,智能投喂机根据指令向对应的养殖池内投入试喂食量的饲料(该饲料可以选择投喂指南中最小规格鱼体对应的饲料种类,例如活水蛛);摄像机组对对应的养殖池内鱼群进食的照片进行拍照,并发送给计算机1;计算机1根据照片分析鱼群的进食方式;
49.s4:计算机1根据各个养殖池的鱼群规格和进食方式判断出各个养殖池里鱼群的投喂量,然后根据投喂量判断第一次喂食量,第一次喂食量为对应投喂量的二分之一,然后计算机1驱动智能投喂机给各个养殖池投喂第一次喂食量的食物;
50.s5:摄像机组对养殖池内的吃食情况进行监控,当吃食情况达到需要添加食物的时候,计算机1向智能投喂机下达指令,给相应的养殖池添加食物,食物的添加量根据投喂指南中的投喂量进行计算,添加量为对应投喂量的四分之一;
51.s6:摄像机组在对对应的养殖池进行拍照的过程中,计算机1会实时地对鱼群的规格进行监控,若鱼群的规格属于投喂指南的下一个阶段时,计算机1会在下一次喂食时,向智能投喂机下达相应规格的食物和相应的添加量。
52.在步骤s2中,判断鱼群规格的方式为:
53.s21:获取图像:每个养殖池内均安装有2个第一摄像机,分别从左右两个方向获取鱼体图像;
54.s22:判断鱼群尺寸大小:计算机1根据第一摄像机在一段时间内拍摄的图像,判断各图像内各个鱼体的尺寸,并对各个鱼体的尺寸进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群尺寸大小;(例如投喂指南中将鱼群的规格分为≤1cm,1
‑
1.5cm,1.5
‑
2cm,2
‑
3cm,3
‑
5cm,当鱼群的长度大于5cm时,采用重量进行规格的判断,依次为:3
‑
5g,5
‑
10g,10
‑
15g,15
‑
50g,50
‑
100g,100
‑
200g,200
‑
300g,300
‑
400g,400
‑
500g,≥500g。当鱼群的长度小于等于5cm时,采用长度进行鱼群规格的分类,大于5cm时,采用重量进行分类。)
55.s23:判断鱼群重量大小:当步骤s22中鱼群尺寸大小达到投喂指南设定的类别大小时,计算机1根据步骤s22中第一摄像机拍摄的图像,判断图像内各个鱼体的重量;并对各个鱼体的重量进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群重量。
56.s24:若步骤s22中鱼群尺寸大小未达到投喂指南设定的类别大小时,则根据鱼群尺寸大小进行规格的判断;若步骤s22中鱼群尺寸大小达到投喂指南设定的类别大小时,则根据鱼群重量进行规格的判断。
57.对深度学习网络结构模型进行异物判断训练和吃食情况判断训练,用于判断养殖池内的异物和吃食情况;在各个养殖池的上方安装第二摄像机,第二摄像机用于获取养殖池表面的图像;计算机1根据第二摄像机获取的图像进行异物的识别、吃食情况的判断以及根据第一摄像机和第二摄像机的图像进行鱼群的进食方式的识别。
58.第二摄像机能够对养殖池表面的情况进行拍摄并将拍摄图像发送给计算机1;计算机1与手机客户端连接,能够向手机客户端发送养殖池的情况;计算机1能够进行分析并能够将产生异物的养殖池的池号发送至手机客户端,通知手机客户端进行处理;计算机1能够进行分析并能够向智能投喂机发送投食指令,投食指令包括池号、食物量和食物种类。
59.智能投喂机包括机体、控制器以及与控制器连接的行走机构和识别机构;各个养殖池上设有轨道,行走机构设于机体的下方,行走机构能够带动机体在轨道上行走;机体内设有若干用于存储不同食物的容纳腔,每个容纳腔的出口处均设有与控制器连接的第二电磁阀,计算机1与控制器连接;远程监控组件6将拍摄的数据发送给计算机1进行处理,每个养殖池上均设有对应识别二维码,识别机构用于识别识别二维码,控制器能够将识别机构识别的识别二维码转化成对应养殖池的池号发送给计算机1;计算机1对养殖池内的吃食情况进行判断。计算机1能够形成各个养殖池的任务指令,计算机1将任务指令和对应的池号发送给手机客户终端;每个养殖池上均设有对应的任务二维码,手机客户端能够通过扫描任务二维码消除对应的任务指令;消除对应的任务指令时需要上传现场拍摄照片。
60.具体实施过程如下:
61.根据鱼群的进食方式,可以分为以下几类别:
①
摄吸式:深海鱼居多,多生活在底层,嘴巴尖圆或是钝圆,靠的是目标物接近的时候,猛烈张口造成强劲水流吸入标的物。
②
掠食式:掠食性鱼群,属于凶猛类群体,以游速快、视力好、活饵为食为特性,因此天性便会恃强凌弱、穷追不舍其他幼小鱼群进行捕食,故吃食时总是使水面翻涌、水体激烈四处窜动,鲈鱼便是属于这种。
③
啃食式:鲫鱼、鲤鱼,便类似此种,吃食情况相对温和,会持续不断的吃食、啃食。
④
滤食式:滤食性鱼类以浮游生物爲食,利用鱼鳃过滤,而后将食物逐渐送入食道,以鳙、鲢类鱼为代表。
62.在各个养殖池内放入同一种类别且同一规格的小鱼苗,第一摄像机对养殖池内的鱼群进行拍照,计算机1根据第一摄像机在一段时间内拍摄的图像,判断各图像内各个鱼体的尺寸,并对各个鱼体的尺寸进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群尺寸大小。若鱼群尺寸大小未达到投喂指南设定的类别大小(可通过计算机1在投喂指南中进行设置)时,则根据鱼群尺寸大小进行规格的判断;若步骤s22中鱼群尺寸大小达到投喂指南设定的类别大小时,计算机1根据第一摄像机拍摄的图像,判断图像内各个鱼体的重量;并对各个鱼体的重量进行归类,最多鱼体数量的类别则设定为该养殖池的鱼群重量,并根据鱼群重量进行规格的判断。并将该鱼群规格与摄像机组对应的养殖池的池号对应起来。
63.然后进行试喂食,计算机1控制智能投喂机在轨道上行走,智能投喂机在每个养殖池内投入一小部分食物(根据饲养人员的经验得出,例如50g),第二摄像机和第一摄像机对鱼群的进食方式进行拍照,计算机1对照片进行处理,从而判断鱼群的类别,并将该类别与摄像机组对应的养殖池的池号对应起来。
64.现在就得到了每个养殖池的鱼群规格和进食方式,计算机1根据鱼群规格和进食方式匹配到投食指南中的食物种类和投喂量。根据投喂量的二分之一进行第一次喂食,每次喂食时,智能投喂机的识别机构会先扫描该养殖池的识别二维码,并将识别的信息通过控制器发送给计算机1,计算机1根据该信息向智能投喂机下达食物种类和第一次喂食量的指令。
65.第二摄像机对养殖池内的吃食情况进行监控,当吃食情况达到需要添加食物的时
候,计算机1向智能投喂机下达指令,给相应的养殖池添加食物,食物的添加量根据投喂指南中的投喂量进行计算,具体为投喂量的四分之一。
66.摄像机组在对对应的养殖池进行拍照的过程中,计算机1会实时地对鱼群的规格进行监控,若鱼群的规格属于投喂指南的下一个阶段时,计算机1会在下一次喂食时,向智能投喂机下达相应规格的食物和相应的添加量。
67.第二摄像机会对养殖池表面进行拍照,计算机1对图像进行分析,若识别处养殖池表面出现异物,会形成任务指令,计算机1将任务指令和对应的池号发送给手机客户终端。养殖户到达该养殖池后,对异物进行处理,并进行拍照,然后扫描任务二维码,在任务指令中上传拍摄的照片,从而消除该任务指令。
68.电力组件9为各组件进行供电,首选市电进行供电。在市电断电时,计算机1启动发电机20,发电机20为鱼群养殖设备进行供电。在发电机20无法启动时,通过柴油发动机21带动发电机20启动,发电机20为鱼群养殖设备进行供电。在发电机20、柴油发动机21均无法启东时,采用ups电力设备22进行供电。
69.各组件在计算机1和电力组件9的作用下为鱼群提供生存所需的条件。水质检测组件2用于检测养殖池内的温度、氧气含量、氨氮含量、有机质含量、ph值和油脂含量,微生物检测组件7用于检测养殖池内的微生物含量,并将检测结果发送给计算机1,计算机1根据检测结果对恒温组件12、增氧组件11、水循环组件3、有益菌培养组件10、杀菌消毒组件8进行控制,以保证水质。当温度传感器13感应到水体温度比较低,计算机1会启动加热器,加热器对水体进行加热,直至达到预先设定的温度。当溶氧度检测探头16检测到水体内的氧气不足时,计算机1打开曝气机进行一定时间的曝气。当氨氮检测探头17、有机质检测仪14、ph检测探头18和油脂检测仪15检测到水体中氨氮、有机质、ph值和油脂含量不符合要求时,计算机1则启动对应培养桶的第一电磁阀,使得相应的菌种对水质进行处理。通过微生物检测传感器实时测量水体微生物情况,当水体有害微生物含量过高时,计算机1立即开启紫外线杀菌器进行杀毒处理。
70.同时远程监控组件6会对养殖池内的吃食进行监控,保证水面上不会存留残饵影响水质,计算机1对远程监控组件6监控的数据进行判断,若需要添加吃食时,计算机1打开第二电磁阀,容纳腔内的食物会投入到养殖池内。
71.关于在计算机1中搭建深度学习网络结构模型并进行训练,从而实现对鱼群的进食方式、鱼群的规格、异物的判断以及吃食情况的判断,进行深度学习网络结构模型的相关训练,都属于现有技术,因此本方案均不赘述。例如在以下现有技术中有公开:202110066341.9
‑
一种水体漂浮物自动识别方法;202011017972.3
‑
水下鱼体重量测量方法及装置。
72.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
73.以上所述的仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作
过多描述,所属领域普通技术人员知晓申请日或者优先权日之前发明所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本发明结构的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。