1.本发明涉及一种清洁装置,具体涉及一种用于长径喷嘴的清洗机器人及其清洗方法。
背景技术:
2.长径喷嘴主要用于测量流体流量,广泛应用于流量计中,根据能量守恒定律以及流动连续性定律,当流体充满管道时,流经管道内的节流装置时,流束将在节流装置的节流件处形成局部收缩,从而使流速增加,静压力低,于是在节流件前后便产生了压力降,即压差,介质流动的流量越大,在节流件前后产生的压差就越大。传统长径喷嘴加工完毕后,会产生表面油污,如机油、切削油、冲压油等,需要将工件表面的油脂除去,以避免油脂的存在影响工件表面质量。工业清洗中针对不同的清洗对象对应有不同的清洗方法,传统长径喷嘴清洗,由于其并不属于大批量生产,通过采用人工擦拭,工业清洗剂对人体具有一定损伤,同时清洗效率极低,并且传统长径喷嘴清洗完毕后,直接烘干其因为材质本身会导致表面出现白斑,影响工件美观。
技术实现要素:
3.发明目的:提供一种用于长径喷嘴的清洗机器人及其清洗方法,有效解决了现有技术存在的上述问题。
4.技术方案:一种用于长径喷嘴的清洗机器人,包括工作台、升降组件、清洁装置、以及夹紧装置四部分。
5.其中,工作台,对称固定在所述工作台两侧的调节件,活动连接在所述工作台上方的夹紧装置,所述夹紧装置沿调节件直线运动;调节件采用转动螺杆,通过调节螺杆控制夹紧装置的直线运动,工件从清洁装置底部进入,通过夹紧装置的升降功能将工件移动至清洁装置内,从而使清洁装置能够有效完成清洁工作。
6.以及,清洁装置,绕所述夹紧装置中心转动,包括,内部中空的箱体,以及沿所述箱体端部延伸的清洁装置,形成气体腔体。气体腔体使清洁装置与工件密切贴合从而有效提高清洁效果,清洁装置与夹紧装置采用分开连接,从而使清洁装置工作过程中,夹紧装置保证工件稳定性,并且有便于夹紧装置内部零件拆卸,方便维修。
7.在进一步实施例中,所述清洁装置,包括沿所述箱体顶部扩展延伸至预定位置的弹性层,以及沿所述弹性层一侧密切贴合的清洁件。弹性层底边缘与移动块上端面保持平齐,从而防止与移动块阻碍弹性层的伸展方向,影响清洁效果。弹性层择优采用橡胶材质,通过空气进入腔体,弹性层伸展包裹住工件,由于工件材质表面具有一定的刚性,并且弹性层带动清洁件进行清洁,所述清洁件择优采用清洁布,能够根据弹性层延展实现同步延伸从而实现清洁效果,弹性层根据工件形状进行变形,从而有效提高清洗工件规格尺寸范围,提高装置的实用性。
8.在进一步实施例中,所述弹性件截面呈倒“山”字形,中部直径沿中心逐渐减小至预定距离后保持不变。根据长径喷嘴工件的外形,传统直筒型的腔体无法完全清洁工件内壁,会导致部分角落无法清洁到位,通过异形边缘,使其充分贴合,能够有效保证清洁效果,避免遗漏。
9.在进一步实施例中,所述箱体沿周向开设有多个进气孔。进气孔均匀分布在箱体周边,从而保证能够同时进气,从而使弹性件膨胀均匀,有效保证均匀包裹,避免遗漏清洁部位。
10.在进一步实施例中,所述夹紧装置,包括内部中空且与所述箱体端面贴合的固定件,以预定距离对称活动连接在所述固定件的推杆,与所述推杆活动连接的楔件,以及以预定距离对称连接的升降组件,所述升降组件末端固定连接有滚轮与所述楔件表面线接触。固定件与升降组件活动连接,螺杆转动带动固定件实现升降,从而带动夹紧装置整体移动,从而夹紧装置推动工件置于清洁装置内,实现清洁。
11.在进一步实施例中,所述滚轮与所述楔件表面固定设置的齿轮形成齿轮齿条机构。由于滚轮与楔件直接接触,滚轮受工件重力的影响容易导致整体装置不稳移动,通过齿轮与楔件上的齿条形成齿轮齿条机构,有效实现自锁,防止楔件随意移动,影响工件的平稳性,同时齿轮齿条有效实现微调。楔件用于调整移动块之间的距离,移动块之间固定连接有伸缩杆,通过伸缩杆能够有效保证移动块支撑范围,从而实现清洗不同规格尺寸的工件。同时楔件分别移动可用于调节工件水平位置,由于楔件表面带有一定角度,从而实现调节移动块的高度,相对设置的楔件并无连接关系,可任意调节工件两端的高度,当工件处于倾斜位置时,可实现工件不同方位的清洁,从而有效避免工件表面遗漏,有效提高清洁质量。
12.在进一步实施例中,所述升降组件包括固定连接在所述滚轮上方的移动块,沿所述移动块上端中空内固定连接的弹簧片,所述弹簧片截面呈“u”字形,中部固定设置有伸缩块,数伸缩块沿弹簧片内壁直线运动。弹簧片具有一定刚度,当伸缩块处于不同位置时,弹簧片之间形成的角度随之变化,从而达到夹持不同厚度的工件,并且弹簧片之间具有一定预紧力,能够有效保证足够的夹持力,从而防止清洁装置转动时,带动工件同步转动,影响工件的清洁效果,伸缩块采用塑性材质,能够随弹簧片的角度变化,发生相应的形变,从而伸缩块下方固定设置的弹簧能够有效缓解弹簧片对工件表面突然地碰撞,而导致工件表面损伤,并且进一步缓解工件对移动块的冲击力,防止滚轮受力发生转动,从而影响整个装置的平稳性。
13.在进一步实施例中,所述清洁装置还包括以预定距离对称固定在所述弹性层两端的喷淋头,所述喷淋头沿弹性层扫描移动。喷淋头用于浸湿工件表面以及与弹性层同步伸展的清洁布,从而保证清洁布能够有效清洁。
14.一种用于长径喷嘴的清洗机器人的清洗方法,包括如下步骤:s1、工件通过传输带传送至清洁装置下方;推杆推动楔件,移动块与工件下表面接触;s2、喷淋头启动沿弹性层自上而下进行扫描式浸湿;s3、移动块内部弹性夹紧,工件表面与移动块紧密接触;s4、清洁箱体内部充入气体,气体腔体膨胀包裹工件;s5、转动轴带动箱体转动,夹紧装置保持不动,从而实现清洁。
15.s6、系统根据其表面油污进行视觉检测处理,并相对调整工件位置;s6、工件上端部清洁完毕后,机械手将工件翻转180
°
,夹紧装置再一次实现夹紧;s7、如此重复,上述步骤s1
‑
s5,完成工件清洁。
16.有益效果:本发明涉及一种用于长径喷嘴的清洗机器人及其清洗方法,包括工作台、升降组件、清洁装置、以及夹紧装置四部分。通过充气式的清洁装置对工件进行工作,充气使清洁布膨胀扩大清洁面积,与清洁布粘附的弹性层有效伸展带动清洁布包裹住工件,从而实现有效清洁。同时根据清洁效果,可通过充气量调节对工件表面的贴合力,从而提高装置的清洁效果,清洁装置与夹紧装置分层配合,从而当清洁装置工作时,有效防止工件随清洁装置同步运动,影响清洁效果。夹紧装置通过“u”形弹簧片对工件实时夹紧,具有一定刚性的弹簧片根据工件重力下压带动伸缩块移动实现相对运动,从而实现各种规格尺寸的工件夹持,弹簧片的相对运动实现角度变化,具有弹性变形能力的伸缩块能够有效适应弹簧片之间的变化。
附图说明
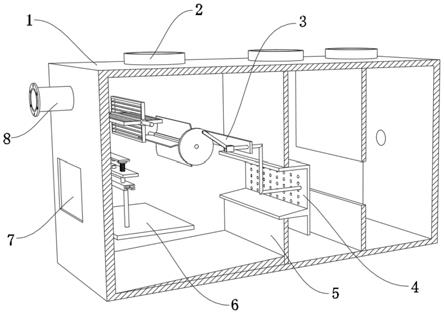
17.图1为本发明的整体结构示意图。
18.图2为本发明中内部整体装置的结构示意图。
19.图3为图2中升降组件的局部结构示意图。
20.图4为升降组件工作状态示意图。
21.图5为清洁装置工作状态示意图。
22.图中各附图标记为:清洁装置1、进气孔101、气体腔体102、弹性层103、清洁件104、箱体105、调节件2、升降组件3、移动块301、弹簧片302、伸缩块303、工作台4、转动轴5、夹紧装置6、固定件601、推杆602、楔件603、滚轮604、伸缩杆7、工件8。
具体实施方式
23.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
24.本发明涉及一种用于长径喷嘴的清洗机器人及其清洗方法,通过充气式的清洁布完全包裹住工件8,从而实现清洁效果,具体方案如下:如图1至图3所示,一种用于长径喷嘴的清洗机器人,包括工作台4、升降组件3、清洁装置1、以及夹紧装置6四部分。
25.其中,工作台4,对称固定在所述工作台4两侧的调节件2,活动连接在所述工作台4上方的夹紧装置6,所述夹紧装置6沿调节件2直线运动;调节件2采用转动螺杆,通过调节螺杆控制夹紧装置6的直线运动,工件8从清洁装置1底部进入,通过夹紧装置6的升降功能将工件8移动至清洁装置1内,从而使清洁装置1能够有效完成清洁工作。并且,清洁装置1长时间工作转动与夹紧装置6存在间隙,螺杆转动调节间隙,从而达到间隙补偿的作用,防止工件8无法贴合清洁装置1,提高清洁装置1的工作效果。
26.由于传统清洁装置1无法适应于长径喷嘴的外形规格,并常使用超声波或者喷淋
对工件8进行清洗,超声波清洗采用工业超声波,长期处于此种环境下工人容易导致工人器官受损,而喷淋清洁无法完全清除表面油污,并且喷淋冲击力容易导致工件8不稳表面磨损,传统清洗工作完成后的需要另外的烘干装置对其进行干燥,而在进行干燥后的工件8表面容易发生表面白斑,从而影响表面质量。
27.本发明中的清洁装置1,绕所述夹紧装置6中心转动,包括,内部中空的箱体105,以及沿所述箱体105端部延伸的清洁装置1,形成气体腔体102。气体腔体102使清洁装置1与工件8密切贴合从而有效提高清洁效果,清洁装置1与夹紧装置6采用分开连接,从而使清洁装置1工作过程中,夹紧装置6保证工件8稳定性,并且有便于夹紧装置6内部零件拆卸,方便维修。长径喷嘴的外形轮廓与普通工件8外形具有偏差,其内部通孔一端带有预定圆弧,外侧高颈部位带有预定角度的锥形,本发明中的清洁装置1根据长径喷嘴外形走向设计,具体方案为:所述清洁装置1,包括沿所述箱体105顶部扩展延伸至预定位置的弹性层103,以及沿所述弹性层103一侧密切贴合的清洁件104。弹性层103底边缘与移动块301上端面保持平齐,从而防止与移动块301阻碍弹性层103的伸展方向,影响清洁效果。弹性层103择优采用橡胶材质,通过空气进入腔体,弹性层103伸展包裹住工件8,弹性层103带动清洁件104进行清洁,所述清洁件104择优采用清洁布,清洁布粘附在弹性层103侧表面,从而能够根据弹性层103延展实现同步延伸从而实现清洁效果,弹性层103根据工件8形状进行变形,从而有效提高清洗工件8规格尺寸范围,提高装置的实用性。
28.所述弹性层103截面呈倒“山”字形,中部直径沿中心逐渐减小至预定距离后保持不变。根据长径喷嘴工件8的外形,传统直筒型的腔体无法完全清洁工件8内壁,会导致部分角落无法清洁到位,通过异形边缘,使其充分贴合,能够有效保证清洁效果,避免遗漏。箱体105进气位置影响着弹性层103变形方向,一个方向的进气孔101,容易导致弹性层103由同一方向延展后抵触工件8,导致工件8位移无法使清洁布完整包裹住工件8,影响清洁效果,所述箱体105沿周向开设有多个进气孔101。进气孔101均匀分布在箱体105周边,从而保证能够同时进气,从而使弹性件膨胀均匀,有效保证均匀包裹,避免遗漏清洁部位。
29.此外,由于长径喷嘴外形尺寸不同,气体腔体102的充气量影响了清洁布对工件8包裹间隙,气体越充足,间隙越小,从而清洁布越贴近工件8,当工件8清洁程度不够时,容易导致油污无法很好去除,从而本发明中的充气式的清洁装置1可通过充气量进行调节清洁效果,对于表面油污不严重的工件8,可减少充气量,能够有效减少能量消耗。
30.完全干燥的清洁布无法对工件8完全清洁,所述清洁装置1还包括以预定距离对称固定在所述弹性层103两端的喷淋头,所述喷淋头沿弹性层103扫描移动。喷淋头用于浸湿工件8表面以及与弹性层103同步伸展的清洁布,从而保证清洁布能够有效清洁。
31.夹紧装置6,包括内部中空且与所述箱体105端面贴合的固定件601,以预定距离对称活动连接在所述固定件601的推杆602,与所述推杆602活动连接的楔件603,以及以预定距离对称连接的升降组件3,所述升降组件3末端固定连接有滚轮604与所述楔件603表面线接触。固定件601与升降组件3活动连接,螺杆转动带动固定件601实现升降,从而带动夹紧装置6整体移动,从而夹紧装置6推动工件8置于清洁装置1内,实现清洁。
32.升降组件3在承受工件8重力时,滚轮604与平滑表面的楔件603直接接触容易导致滚轮604位移,从而无法保证工件8的稳定不动。所述滚轮604与所述楔件603表面固定设置的齿轮形成齿轮齿条机构。由于滚轮604与楔件603直接接触,滚轮604受工件8重力的影响
容易导致整体装置不稳移动,通过齿轮与楔件603上的齿条形成齿轮齿条机构,有效实现自锁,防止楔件603随意移动,影响工件8的平稳性,同时齿轮齿条有效实现微调。楔件603用于调整移动块301之间的距离,移动块301之间固定连接有伸缩杆7,通过伸缩杆7能够有效保证移动块301支撑范围,从而实现清洗不同规格尺寸的工件8。同时楔件603分别移动可用于调节工件8水平位置,由于楔件603表面带有一定角度,从而实现调节移动块301的高度,相对设置的楔件603并无连接关系,可任意调节工件8两端的高度,当工件8处于倾斜位置时,可实现工件8不同方位的清洁,从而有效避免工件8表面遗漏,有效提高清洁质量。
33.长径喷嘴两端均有一端平面体,通过对平面体的夹持从而使清洁装置1在转动过程中,夹紧装置6始终夹紧工件8,让工件8保持原位不动,清洁装置1相对工件8转动,从而达到清洁效果。所述升降组件3包括固定连接在所述滚轮604上方的移动块301,沿所述移动块301上端中空内固定连接的弹簧片302,所述弹簧片302截面呈“u”字形,中部固定设置有伸缩块303,数伸缩块303沿弹簧片302内壁直线运动。弹簧片302具有一定刚度,当伸缩块303处于不同位置时,弹簧片302之间形成的角度随之变化,从而达到夹持不同厚度的工件8,并且弹簧片302之间具有一定预紧力,能够有效保证足够的夹持力,从而防止清洁装置1转动时,带动工件8同步转动,影响工件8的清洁效果,伸缩块303采用塑性材质,能够随弹簧片302的角度变化,发生相应的形变,从而伸缩块303下方固定设置的弹簧能够有效缓解弹簧片302对工件8表面突然地碰撞,而导致工件8表面损伤,并且进一步缓解工件8对移动块301的冲击力,防止滚轮604受力发生转动,从而影响整个装置的平稳性。
34.此外,本发明提供了一种用于长径喷嘴的清洗机器人的清洗方法,包括如下步骤:机械手将待清洁工件8通过传输带传送至清洁装置1下方,气缸根据工件8内径推动楔件603移动,移动块301与工件8外边缘相对应,并与工件8下表面直接接触,移动块301内的伸缩块303下压弹簧,同时弹簧片302自身伸缩与工件8表面接触形成一定角度,并将自身弹性转化为对工件8表面的夹紧力,喷淋头启动,相对设置的喷淋头沿弹性层103自上而下进行扫描式浸湿,清洁布充分吸收清洗液后,推杆602继续推动楔件603,使工件8移动至清洁组件内内预定位置后,气缸锁定,使工件8保持在固定位置,气体通过三个进气孔101同时冲入气体腔体102内,弹性层103伸展带动清洁布同步伸展直至触碰到工件8表面,气体腔体102膨胀包裹工件8后,转动轴5带动箱体105转动,清洁布沿工件8表面转动,此时夹紧装置6保持不动,仅仅依靠清洁布相对工件8转动便可实现清洁,系统根据其表面油污进行视觉检测处理,检测到油污位置以及方向,通过一方推杆602推动楔件603,滚轮604沿楔件603表面移动,实现移动块301的升降位移,从而改变工件8倾斜方向,此时工件8与清洁布的贴合面发生改变,使具有油污的拐角靠近清洁布,转动轴5继续带动进行清洗,工件8上端部清洁完毕后,机械手将工件8翻转180
°
,夹紧装置6再一次实现夹紧;如此再次重复上述清洗步骤,直至工件8清洗完成。
35.另外,本发明中的清洁装置1同时可实现擦干功能,由于长径喷嘴的材质普通烘干容易导致表面出现白斑,影响表面质量。通过充气的方式,可在工件8清洁完毕后,不需要更换设备以及转移工件8位置,继续对弹性层103进行充气将清洁布向工件8表面收紧进行挤压,可直接将清洁布内的清洗剂挤出,达到清洁布干燥的效果后,在此过程夹紧装置6始终保持夹紧状态,清洁装置1再次启动绕转动轴5转动,与清洁工作状态同样的工作方式,达到工件8表面干燥的效果。如此,工件8的一次装夹同时完成清洗、干燥两个工作,减少不必要
的装夹次数,有效提高工作效率,以及在同一台设备完成工作,有效提高装备实用性。
36.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。