技术特征:
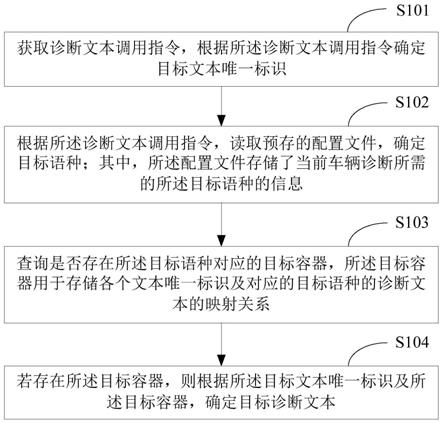
1.一种水面无人艇避障方法,其特征在于,包括:根据航行区域全局信息,考虑已知的障碍物,根据先验的电子海图,结合起始位置,完成路径规划;在航行过程中,获取动态障碍物,结合航行区本艇所在位置,完成局部避障。2.根据权利要求1所述的方法,其特征在于,所述根据航行区域全局信息,考虑已知的障碍物,根据先验的电子海图,结合起始位置,完成路径规划,包括:根据无人艇实际航行区域,选择实际航行区域的电子海图,将该电子海图栅格化后提取实际航行区域的静态障碍物,将静态障碍物所在区域视为不可达区域,其余区域划分为可达区域,得到二值化后的电子海图;利用a*算法,结合二值化的电子海图,规划一条从起点到终点的目标路径。3.根据权利要求1或2所述的方法,其特征在于,所述在航行过程中,获取动态障碍物,结合航行区本艇所在位置,完成局部避障,包括:在无人艇根据目标路径进行航行时,不间断的获取动态障碍物,并将动态障碍物定位于二值化的电子海图中,当某一动态障碍物与本艇的距离小于预设安全距离,且本艇航向位于障碍区域时,进行局部避障。4.根据权利要求3所述的方法,其特征在于,所述障碍区域的确定方式为:设本艇的行驶速度为以本艇o0为坐标原点,建立直角坐标系,动态移动目标o1行驶速度为以o1为中心,进行半径为r的圆形膨胀c作为不可达区域,经o0做圆c的切线l
r
和l
l
,l
r
与l
l
的夹角范围作为障碍区域δ。5.根据权利要求4所述的方法,其特征在于,所述本艇航向位于障碍区域时,包括:本艇o0与动态移动目标o1的相对速度当在障碍区域δ内时,表示本艇航向位于障碍区域,其中,6.根据权利要求5所述的方法,其特征在于,所述进行局部避障,包括:计算与l
l
的夹角θ1,与l
r
的夹角θ2,若θ1<θ2,则调整速度和航向趋近于l
l
的方向,若θ1≥θ2,则调整速度和航向趋向于l
r
的方向;实时计算和障碍区域δ,如果已不在障碍区域δ内,则避障完成,其中,θ1=θ
l
‑
θ,θ2=θ
‑
θ
r
,θ为x轴与的夹角,θ
l
为l
l
与x轴的夹角,θ
r
为l
r
与x轴的夹角。7.根据权利要求6所述的方法,其特征在于,在进行局部避障时,根据航速法和/或航向法调整速度和航向完成避障。8.根据权利要求7所述的方法,其特征在于,对于航向法,在更靠近l
r
时,调整方向,控制本艇航向偏向于l
r
,在更靠近l
l
时,调整方向,控制本艇航向偏向于l
l
,当调整至时,已经偏出障碍区域δ,完成避障,其中,航向的调整幅度设置为δθ,其中,δθ=min(θ1,θ2),9.根据权利要求7所述的方法,其特征在于,对于航速法,在相对速度更靠近l
r
时,调
整偏向l
r
驶出障碍区域δ,在相对速度更靠近l
l
时,调整偏向l
l
驶出障碍区域δ,当保持本艇航向,降低本艇速度至时,相对速度已不在障碍区域δ范围内,即完成避障,其中,避障,其中,10.根据权利要求7所述的方法,其特征在于,进行局部避障,在采用航速法和航向法融合时,通过将本艇降至怠速,然后将舵角根据判定的偏向打至满舵,以快速避开障碍区域δ,完成避障。
技术总结
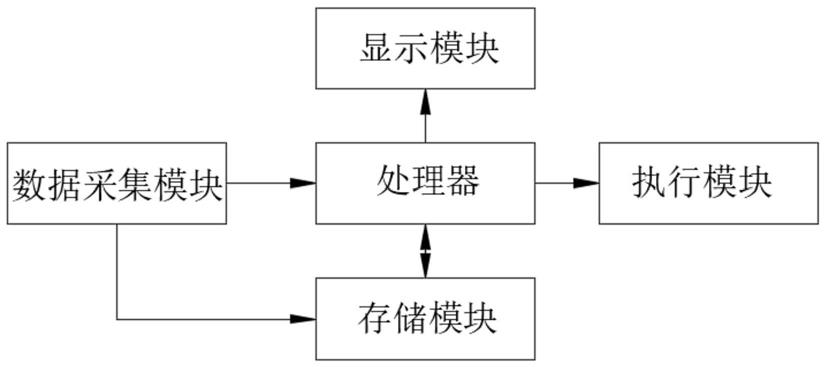
本发明公开了一种水面无人艇避障方法,属于水面无人艇自主任务决策技术领域,根据航行区域全局信息,考虑已知的障碍物,根据先验的电子海图,结合起始位置,完成路径规划;在航行过程中,获取动态障碍物,结合航行区本艇所在位置,完成局部避障。本发明通过采用两级避障策略,结合全局路径规划和局部动态障碍物避障,从全局和局部分别对静态和动态障碍物进行规避,为无人艇安全自主航行提供保障;该发明为一种简洁、易实现的避障方法,可用于任何船舶智能避碰系统;全局
技术研发人员:闫红州 朱奇舸 张逸凡 岳林 唐李军
受保护的技术使用者:中国舰船研究设计中心
技术研发日:2021.07.22
技术公布日:2021/11/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。