1.本发明属于封闭场景下无人集卡应用的技术领域,特别是涉及一种多式联运的船舶与堆场间无人集卡调度优化方法。
背景技术:
2.自动化码头的发展使基于“作业面”的集卡调度模式有了实现的基础,而无人驾驶技术的应用则能更好地提高调度效率与准确性。目前常见的自动化码头的集装箱船舶装卸的主要流程为:进港船舶的待卸集装箱通过岸桥搬运至无人集卡,由无人集卡运送至作业计划指定堆场进口箱区,之后空载回到岸边或者到出口箱区通过场桥取箱运至出港船舶处装船。待集装箱装船后,此时无人集卡可选择继续前往出口箱区取箱或者返回进港船舶处取箱。通过上述分析,基于“作业面”动态调度的无人集卡在进行水平运输作业时有多种路线选择:
3.(1)无人集卡由岸桥装载一个进口箱,运送至作业计划指定堆场进口箱区,然后空箱返回泊位;(2)无人集卡由岸桥装载一个进口箱,运送至作业计划指定堆场进口箱区,然后前往出口箱区取箱,运送至出港船舶泊位装船;(3)无人集卡在堆场出口箱区装载一个出口箱至出港船舶装船,然后空箱返回堆场;(4)无人集卡在堆场出口箱区装载一个出口箱至出港船舶装船,然后空箱前往进港船舶泊位。
4.船舶进港后,卸下的集装箱通过岸桥搬运至无人集卡,无人集卡将集装箱运送至堆场后空箱返回泊位或取箱后返回泊位,该过程构成无人集卡在港内进行水平运输的行走回路。另外,目前众多堆场都清晰地划分了进、出口箱区,更便于无人集卡按箱区编号进行调度。但是目前,船舶与堆场间的集卡调度问题仍然是最为常见的自动化码头内部水平运输作业调度问题,也是衔接以港口为枢纽的公水联运的重要环节。
技术实现要素:
5.发明目的:为了解决现有的存在封闭场景下船舶与堆场间的无人集卡调度问题,通过减少集卡行驶的总距离,减少集卡运输作业的总时间,降低运营成本,以达到无人集卡的运营成本最小为优化目标,本发明提供一种多式联运的船舶与堆场间无人集卡调度优化方法。
6.技术方案:为实现本发明的目的,本发明所采用的技术方案是:一种多式联运的船舶与堆场间无人集卡调度优化方法,包括以下步骤:
7.步骤一:根据作业计划,结合无人集卡满载行驶次数以及岸桥与场桥的装卸次数,以及运输节点间距离,以运输成本最低为优化目标,构建无人集卡调度模型;
8.步骤二:设置无人集卡在进港船舶和出港船舶间的行走次数,进一步简化模型,采用动态规划算法,进行求解获得无人集卡的作业计划动态规划数据;
9.步骤三:通过实际作业运营进行多次校验、优化,获得无人集卡的最优路线。
10.进一步的,步骤一中,以运输成本最低为优化目标,构建无人集卡调度模型,设置
无人集卡空载形式的总时间最短为目标函数z,具体见公式(1
‑
1):
[0011][0012]
其中,a表示集装箱船舶集合;e表示集装箱进口堆场箱区集合;d
ef
、d
ae
、d
bf
、d
ba
表示节点e与f、节点a与e、节点b与f、节点b与a间的距离;v
d
表示无人集卡空载时的速度;q
ef
表示无人集卡从进口箱区e至出口箱区f空载运输作业次数;q
ea
表示无人集卡从进口箱区e至进港船舶a空载运输作业次数;q
bf
表示无人集卡从出港船舶b至出口箱区f空载运输作业次数;q
ba
表示无人集卡从出港船舶b至进港船舶a空载运输作业次数。
[0013]
进一步的,步骤二中,进行简化模型时,具体的方法为:
[0014]
设置当无人集卡在进港船舶和出港船舶间的行走次数为:q
ba
=min(m,n)时,目标函数z简化为:
[0015][0016]
其中m表示进港船舶a需要卸载的集装箱数量,n表示堆场箱区中需要装载到出港船舶b的集装箱数量。
[0017]
进一步的,目标函数z的约束条件设置为
[0018]
∑
e∈e
q
ae
=m
ꢀꢀ
(1
‑
3),
[0019]
∑
f∈f
q
fb
=n
ꢀꢀ
(1
‑
4),
[0020]
m n=q
ꢀꢀ
(1
‑
5);
[0021]
公式(1
‑
3),表示为无人集卡将进港船舶a卸下的集装箱运送到进口箱区的次数等于该进港船舶待卸的集装箱数量;m表示进港船舶a需要卸载的集装箱数量;
[0022]
公式(1
‑
4),表示无人集卡从堆场出口箱区将待装船集装箱运送到出港船舶b的次数等于出港船舶b需要装载的集装箱数量;n表示堆场箱区中需要装载到出港船舶b的集装箱数量;
[0023]
公式(1
‑
5),表示无人集卡运输作业的总箱量即为进港船舶a需要卸载的集装箱数量与出港船舶b需要装载的集装箱数量之和;q表示无人集卡运输作业的总箱量。
[0024]
进一步的,步骤二中,在动态规划算法获得动态规划数据时,具体步骤为:
[0025]
(1)设定无人集卡的作业计划,是要依序完成n个作业任务或n个阶段,记状态变量s
k
为k阶段任务起始时的无人集卡分布状态,决策变量x
k
为完成k阶段任务的无人集卡,决策集为v
k
,k=1,2,3,...,n;
[0026]
(2)当k阶段状态变量s
k
的值确定后,按照状态转移方程即公式(1
‑
6),完成k阶段任务后的无人集卡分布状态;公式为
[0027][0028]
其中表示k阶段状态转移;s
k 1
表示完成k阶段任务后的无人集卡分布状态;
[0029]
(3)再通过无人集卡空驶至任务点的时间记为k阶段效应函数(1
‑
7),获得目标函数公式(1
‑
8),公式为
[0030][0031][0032]
其中v
k
表示k阶段的阶段效应,即空驶时间;d
i
表示节点间的距离,i表示空驶节点对,i∈{ae,ef,bf};v
d
表示无人集卡空载时的速度;
[0033]
(4)获得作业计划中动态规划的基本方程(1
‑
9),按照动态规划的数据进行n阶段的作业,其中,公式为:
[0034][0035]
其中s0表示初始状态变量;f0(s0)表示初始状态变量条件下的目标函数值。
[0036]
有益效果:本发明提出了封闭场景下船舶与堆场间无人集卡调度优化方法,以自动化码头最为常见的公水联运为背景,解决了场站内的无人集卡调度问题。具体的是,一方面,通过问题分析,以运输成本最低为优化目标建立模型。另一方面,针对该场景以及无人集卡的特性对模型加以简化,并采用动态规划算法进行精确求解。同时,本发明中通过具体的实施例,对模型进行验证分析,也验证了本发明优化方法的可实施性、可操作性,具有重要意义。
附图说明
[0037]
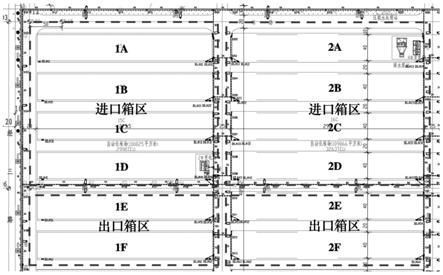
图1为本发明实施例中堆场箱区分布示意图。
具体实施方式
[0038]
下面结合实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
[0039]
无人集卡调度模型构建前符合假设条件:1)假设在某段时间内港内同时存在进出港船舶需要进行装卸作业,通过协调装卸设备和水平运输设备同时对到港船舶进行服务,且进港船舶只进行卸船作业,而出港船舶只进行装船作业;2)无人集卡布置在岸边和箱区,且港口内布置的无人集卡可在所有岸桥、场桥间共享;3)进行装卸作业前将制定相应的作业计划,岸桥、场桥均能按计划执行装卸任务,且为保证岸桥得到充分利用,假定在无人集卡作业过程中无岸桥等待无人集卡以及无人集卡等待岸桥的现象;4)无人集卡每次只可装载一个标准集装箱,集卡独立运行,且在堆场内运行顺畅无拥堵现象。
[0040]
本发明提供的一种多式联运的船舶与堆场间无人集卡调度优化方法,具体的为:
[0041]
步骤一:根据作业计划,结合无人集卡满载行驶次数以及岸桥与场桥的装卸次数,以及运输节点间距离,以运输成本最低为优化目标,构建无人集卡调度模型;
[0042]
本发明中目标函数z:
[0043]
[0044]
根据作业计划,无人集卡满载行驶次数以及岸桥与场桥的装卸次数均已知且固定,即,∑
a,b∈a
∑
e∈e
((d
ae
/v
h
)q
ae
(d
be
/v
h
)q
eb
)e
h
和(x
a
t
a
x
b
t
b
)e
w
已确定,
[0045]
则原目标函数z可简化为使无人集卡空载行驶的总时间最短:具体见公式(1
‑
1):
[0046][0047]
其中,a表示集装箱船舶集合;e表示集装箱进口堆场箱区集合;d
ef
、d
ae
、d
bf
、d
ba
表示节点e与f、节点a与e、节点b与f、节点b与a间的距离;v
d
表示无人集卡空载时的速度;q
ef
表示无人集卡从进口箱区e至出口箱区f空载运输作业次数;q
ea
表示无人集卡从进口箱区e至进港船舶a空载运输作业次数;q
bf
表示无人集卡从出港船舶b至出口箱区f空载运输作业次数;q
ba
表示无人集卡从出港船舶b至进港船舶a空载运输作业次数。
[0048]
步骤二:设置无人集卡在进港船舶和出港船舶间的行走次数,进一步简化模型,采用动态规划算法,进行求解获得无人集卡的作业计划动态规划数据;
[0049]
设置当无人集卡在进港船舶和出港船舶间的行走次数为:q
ba
=min(m,n)时,目标函数z简化为:
[0050][0051]
其中m表示进港船舶a需要卸载的集装箱数量,n表示堆场箱区中需要装载到出港船舶b的集装箱数量。
[0052]
目标函数z的约束条件设置为
[0053]
∑
e∈e
q
ae
=m
ꢀꢀ
(1
‑
3),
[0054]
∑
f∈f
q
fb
=n
ꢀꢀ
(1
‑
4),
[0055]
m n=q
ꢀꢀ
(1
‑
5);
[0056]
公式(1
‑
3),表示为无人集卡将进港船舶a卸下的集装箱运送到进口箱区的次数等于该进港船舶待卸的集装箱数量;m表示进港船舶a需要卸载的集装箱数量;
[0057]
公式(1
‑
4),表示无人集卡从堆场出口箱区将待装船集装箱运送到出港船舶b的次数等于出港船舶b需要装载的集装箱数量;n表示堆场箱区中需要装载到出港船舶b的集装箱数量;
[0058]
公式(1
‑
5),表示无人集卡运输作业的总箱量即为进港船舶a需要卸载的集装箱数量与出港船舶b需要装载的集装箱数量之和;q表示无人集卡运输作业的总箱量。
[0059]
在动态规划算法获得动态规划数据时,具体步骤为:
[0060]
(1)设定无人集卡的作业计划,是要依序完成n个作业任务或n个阶段,每个阶段都可以作为由位于港内某处的无人集卡先空驶至任务起点,再重载行驶至任务终点的过程,记状态变量s
k
为k阶段任务起始时的无人集卡分布状态,决策变量x
k
为完成k阶段任务的无人集卡,决策集为v
k
,k=1,2,3,...,n;
[0061]
(2)当k阶段状态变量s
k
的值确定后,按照状态转移方程即公式(1
‑
6),完成k阶段任务后的无人集卡分布状态;公式为
[0062][0063]
其中表示k阶段状态转移;s
k 1
表示完成k阶段任务后的无人集卡分布状态;
[0064]
(3)再通过无人集卡空驶至任务点的时间记为k阶段效应函数(1
‑
7),获得目标函数公式(1
‑
8),公式为
[0065][0066][0067]
其中v
k
表示k阶段的阶段效应,即空驶时间;d
i
表示节点间的距离,i表示空驶节点对,i∈{ae,ef,bf};v
d
表示无人集卡空载时的速度;
[0068]
(4)获得作业计划中动态规划的基本方程(1
‑
9),按照动态规划的数据进行n阶段的作业,其中,公式为:
[0069][0070]
其中s0表示初始状态变量;f0(s0)表示初始状态变量条件下的目标函数值。
[0071]
步骤三:通过实际作业运营进行多次校验、优化,获得无人集卡的最优路线。
[0072]
实施例1
[0073]
本发明取某港口的自动化码头为例,选取该自动化码头的部分堆场,采用本发明中构建模型、简化模型,及动态规划的算法,进行算例验证,其中图1所示,主要包含8个进口箱区与4个出口箱区供集装箱堆存。假设某一时刻进港船舶a和出港船舶b同时到达该港口。其中船舶与各个箱区间的距离见表1。
[0074]
表1船舶、箱区间的距离(单位:m)
[0075] ab1a1b1c1d1e1f2a2b2c2d2e2fa0300250300350400450500550600650700750800b30005506006507007508002503003504004505001a2505500501001502002503003504004505005501b300600500501001502003503003504004505001c350650100500501001504003503003504004501d400700150100500501004504003503003504001e450750200150100500505004504003503003501f5008002502001501005005505004504003503002a5502503003504004505005500501001502002502b600300350300350400450500500501001502002c650350400350300350400450100500501001502d700400450400350300350400150100500501002e750450500450400350300350200150100500502f800500550500450400350300250200150100500
[0076]
岸桥和场桥每次仅能装卸一个集装箱,且无人集卡每次也仅能运送一个集装箱。港内有6辆无人集卡进行水平运输作业,且初始分布在岸边和进出口箱区,无人集卡重载时速度v
h
=4m/s,空载时速度为v
d
=5m/s,岸桥装卸一个集装箱的平均作业时间为120s,场桥装卸一个集装箱的平均作业时间为90s。根据作业计划,进港船舶a需要进行38次集装箱卸
船作业,出港船舶b需要进行12次集装箱装船作业,详细计划如表2所示。
[0077]
表2无人集卡作业计划表
[0078][0079][0080]
根据上述数据,采用动态规划算法求解无人集卡调度模型,应用python语言进行
编程,得到无人集卡的最优路线如下表3所示。
[0081]
表3无人集卡运输路径
[0082][0083][0084]
根据无人集卡运输路径可以计算得到整个作业过程空载率为38.87%,而传统作业线方式进行集卡调度作业的空载率约为50%,空载率降低显著,可显著提高自动化码头作业效率,从而降低港口的作业成本。
[0085]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。