一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法及系统
技术领域
1.本发明属于卫星测高学、海洋测绘学等交叉技术领域,尤其涉及一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法及系统。
背景技术:
2.gnss
‑
r卫星可作为传统高度计的补充,为全球海洋中尺度过程,以及全球气候变化研究提供亟需的全球高覆盖海面高度观测。风浪塑造的粗糙海面使gnss
‑
r信号在镜面反射点周围的海面发生散射,造成功率反射波形的峰值点位置相对于镜面反射点向后偏移。这种偏移约为几纳秒,并且随风速和有效波高(swh)的增大而增大,相关函数导数dcf的峰值将降低减弱,使得峰值时刻的测量带有很大的不确定性。当海面存在偏度时,反射信号相关函数变得不对称并产生偏移。与相关函数最大值对应的到达时间标识的不是平均海平面的位置,而是较低的海面概率分布函数的平均位置。
3.镜面反射点同步的ssb目前无法由观测直接获取。目前通用的思想是从反射信号相关功率波形中确定镜面反射点位置,获得反射延迟,主要方法包括max、der、half。max方法定义镜面反射点时延位于波形峰值点处,并未考虑海况偏差。rius利用反射信号相关功率的一阶导数(dcf)对gnss
‑
r镜面反射点的反射信号延迟进行估计,基于大量采样估计的散射延迟不确定性为~4m。half法将波形上75%峰值相关功率对应的点作为镜面反射点。这些方法是基于假设最早到达接收机的回波来自镜面反射点,但是由于海况和接收器的频率响应等因素的影响可能存在偏差,而目前还没有对这种偏差进行建模和预测。
技术实现要素:
4.本发明的技术解决问题:克服现有技术的不足,提供一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法及系统,旨在修正gnss
‑
r测高的海况误差,提高海面高度反演精度,进而为高精度的gnss
‑
r卫星海面测高等应用提供中、大尺度下海域细分的延迟海况偏差校正支持。
5.为了解决上述技术问题,本发明公开了一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法,包括:
6.确定模型延迟和观测延迟;
7.根据模型延迟和观测延迟,对延迟海况偏差进行量化;
8.基于延迟海况偏差的量化结果,在bm4模型的基础上引入与海况独立的反射角和入射角两个参量,回归各参量系数,构建得到海况偏差参数模型;
9.根据海况偏差参数模型,预测延迟海况偏差。
10.在上述gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法中,通过如下方式确定模型延迟:
11.构建平均海面反射面模型;
12.基于构建的平均海面反射面模型,计算得到反射路程和直射路程;
13.将计算得到的反射路程与直射路程的差,记作模型延迟。
14.在上述gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法中,通过如下方式确定观测延迟:
15.通过k次采样,确定观测延迟;其中,观测延迟中的误差源包括:单个波形的延迟海况偏差σ
ss
(i)、单个波形的噪声延迟偏差σ
noi
(i)、单个波形的大气延迟偏差σ
atm
(i)、以及单个波形除延迟海况偏差、噪声延迟偏差和大气延迟偏差之外的其他延迟偏差δσ
obs
(i);
16.观测延迟中的各误差源满足如下式(1):
[0017][0018]
其中,σ
obs
表示平均观测延迟偏差,一次采样对应一个波形。
[0019]
在上述gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法中,根据模型延迟和观测延迟,对延迟海况偏差进行量化,包括:
[0020]
将观测延迟中除延迟海况偏差外的其他延迟偏差与模型延迟做差,并采样求平均进行去除;
[0021]
通过如下式(2)对延迟海况偏差进行量化:
[0022][0023]
其中,σ
ss
表示平均海况偏差,d
obs
(i)表示单个波形的观测延迟,d
mod
(i)表示当前采样的模型延迟,δσ表示观测延迟与模型延迟之差中除延迟海况偏差外的其他延迟偏差。
[0024]
在上述gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法中,当满足如下条件时,通过上述式(2)对延迟海况偏差进行量化:
[0025]
a)随机误差的影响被有效抑制;
[0026]
b)满足对多种海况和不同反射入射角场景的覆盖需求;
[0027]
c)平均海面反射面模型的镜面反射点的定位准确;
[0028]
d)大气延迟和平台误差可消除。
[0029]
在上述gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法中,基于构建的平均海面反射面模型,计算得到反射路程和直射路程,包括:
[0030]
对镜面反射点进行修正定位,得到镜面反射点在平均海面反射面上的位置;
[0031]
基于构建的平均海面反射面模型,结合面反射点在平均海面反射面上的位置,计算得到反射路程和直射路程。
[0032]
在上述gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法中,对镜面反射点进行修正定位,得到镜面反射点在平均海面反射面上的位置,包括:
[0033]
高程修正定位:采用海面动态地形高程对镜面反射点进行修正定位,得到一次修正定位后的镜面反射点;
[0034]
海面坡度的修正定位:以垂线偏差的子午分量ζ和卯酉分量η作为修正量,对一次修正定位后的镜面反射点的法向在子午方向和卯酉方向上进行修正定位,将一次修正定位后的镜面反射点修正至法向的垂面,得到镜面反射点在平均海面反射面上的位置。
[0035]
相应的,本发明还公开了一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测系统,包括:
[0036]
确定模块,用于确定模型延迟和观测延迟;
[0037]
量化模块,用于根据模型延迟和观测延迟,对延迟海况偏差进行量化;
[0038]
模型构建模块,用于基于延迟海况偏差的量化结果,在bm4模型的基础上引入与海况独立的反射角和入射角两个参量,回归各参量系数,构建得到海况偏差参数模型;
[0039]
预测模块,用于根据海况偏差参数模型,预测延迟海况偏差。
[0040]
本发明具有以下优点:
[0041]
本发明公开了一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方案,构建了一种新型的海况偏差参数模型,可预测延迟海况偏差的变化。结果表明,中国海春夏交替季节的延迟海况偏差约为1.3m,具有明显的海域、纬度、离岸距离差异。该新型的海况偏差参数模型能够可靠地预测延迟海况偏差在中、大尺度的变化。该新型的海况偏差参数模型对海况偏差更小的高仰角场景预测更准确。
附图说明
[0042]
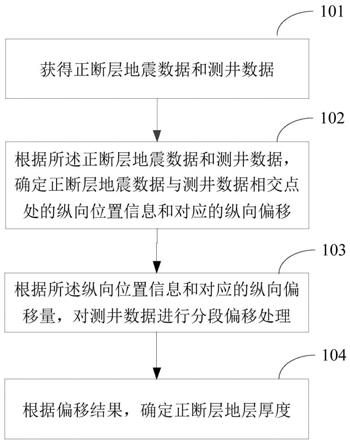
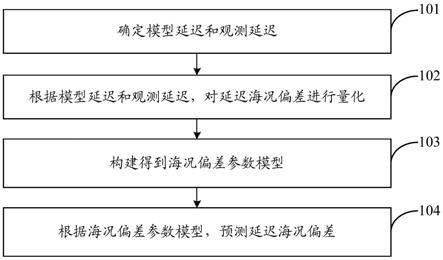
图1是本发明实施例中一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测的步骤流程图;
[0043]
图2是本发明实施例中一种模型的残差置信区间示意图;其中,2(a)为gps
‑
r,2(b)为bds
‑
r;
[0044]
图3是本发明实施例中一种量化的与模型计算的延迟海况偏差的对比示意图;其中,3(a)为gps
‑
r,3(b)为bds
‑
r;
[0045]
图4是本发明实施例中一种升序的采样反射入射角及对应的延迟海况偏差一阶多项式的示意图;其中,4(a)为gps
‑
r,4(b)为bds
‑
r;
[0046]
图5是本发明实施例中一种各反射入射角分组的延迟海况偏差均值和模型r2的示意图;其中,5(a)为gps
‑
r,5(b)为bds
‑
r。
具体实施方式
[0047]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
[0048]
本发明的核心思想之一在于:基于观测延迟与模型延迟的差来量化延迟海况偏差。这需要有效抑制观测延迟中的热噪声和散斑噪声等随机误差,以分离延迟海况偏差(该过程可以基于数据处理和大量采样的平均达到)。在中频数据处理中,采用毫秒级的相干积分和秒级的非相干累加可以提高信噪比,对热噪声和散斑噪声分别具有抑制作用。而相干积分时间的加长并不会对海况误差有显著的平滑作用。除分离和量化延迟海况偏差,构建经验参数模型也需要覆盖多种海况和入射角场景的大量观测。天基和空基场景的大气延迟消除不彻底会对延迟海况偏差的提取造成影响。岸基和空基观测受限于时空和模型参量的覆盖。空基观测通常无法获得大量采样。相比这些平台,船基观测具有独特优势。大型调查船的航程通常较长,采样量大,对时空和海况覆盖较高。船基平台反射路径短,需要去除的误差源较少,信号质量相比空基和天基具有天然优势。大气延迟和船体姿态引入的不确定
性在船基场景可以巧妙地避免。覆盖多个海域和近岸、近海、深海的船载观测可以支持海况偏差的空间分布特征研究。
[0049]
量化延迟海况偏差的另一个重要方面是获得精确的基于模型计算的反射延迟,这需要修正反射面模型与实际海面的差异引入的镜面反射点几何定位误差。反射面的建模经历了标准球面、地球椭球面、大地水准面、海洋潮汐面逐步修正精化的历程,然而振幅为
±
2m的海面平均动态地形误差还未修正。海面地形最主要的影响因素是全球平均流场,其最高处为受黑潮影响的西太平洋。本船载实验航线经过黑潮的支流台湾暖流和黄海暖流的影响区域。因此,将海面地形纳入模型反射延迟的计算是必要的。此外,martin对海面坡度影响的分析是在假设镜面反射点空间位置不变的前提下,由此带来的坡度误差在高度反演中需要进一步修正。
[0050]
海况偏差参数模型的选择是本发明需要解决的另一个问题。传统卫星高度计的海况偏差参数模型已发展得较为成熟。目前应用最广泛的是bm系列模型的bm4模型,模型参量包括swh和风速及其组合参量。传统高度计反射入射角较小且变化稳定,并未纳入模型的参数,而gnss
‑
r反射入射角变化范围较大,传统高度计的海况偏差模型参量显然不能满足gnss
‑
r的独特需求。
[0051]
不同大洋、海域以及离岸距离具有海况差异,必然导致不同的延迟海况偏差。了解延迟海况偏差的空间分布特征可以对不同海域有针对性地制定后处理策略和修正反演误差。本发明为获取这种先验知识提供了一种区域的可行方法。船载采样覆盖了包括黄海、东海、南海的中国海大部分海域。这些海域具有显著的海况差异。采样覆盖了近岸、近海和深远海等不同离岸距离和水深的海域。近岸和靠港期间信号容易受到杂波信号的干扰,近岸和近海的水深较浅,这导致波浪破碎、白冠、浪
‑
流相互作用等非线性动力效应较强,径流影响也更显著,可能会增加海况偏差的不确定性。另一方面,中国海的海况具有明显的季节性变化。本航次跨越5月和6月,这是中国海一年中海况季节性变化显著的时期。
[0052]
如图1,在本实施例中,该gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测方法,包括:
[0053]
步骤101,确定模型延迟和观测延迟。
[0054]
模型延迟
[0055]
模型延迟是基于模型计算得到的反射路程与直射路程之差,主要误差是由反射面相对实际海面的高程和坡度差异造成的。在本实施例中,可以通过构建平均海面反射面模型;然后,基于构建的平均海面反射面模型,计算得到反射路程和直射路程;最后,将计算得到的反射路程与直射路程的差,记作模型延迟。
[0056]
优选的,为了保证模型延迟的准确性,需要通过对镜面反射点进行修正定位,以确保通过平均海面反射面模型计算得到的反射路程和直射路程的准确性,进而保证得到的模型延迟的准确性。即,对镜面反射点进行修正定位,得到镜面反射点在平均海面反射面上的位置;基于构建的平均海面反射面模型,结合面反射点在平均海面反射面上的位置,计算得到反射路程和直射路程。
[0057]
其中,一种可行的镜面反射点的修正定位包括如下两个修正定位过程:
[0058]
高程修正定位:在高程修正定位中引入海面动态地形高程,即采用海面动态地形高程对镜面反射点进行修正定位,得到一次修正定位后的镜面反射点。
[0059]
海面坡度的修正定位:在海面坡度的修正定位中,先后以垂线偏差的子午分量ζ和卯酉分量η作为修正量,对一次修正定位后的镜面反射点的法向在子午方向和卯酉方向上进行修正定位,具体的,可以基于无近似法向投影修正法,依序先后在入射面和其垂面内直接解算子午分量、卯酉分量在当前平面上的投影与反射路径的空间几何关系;然后,通过迭代将一次修正定位后的镜面反射点修正至法向的垂面,得到镜面反射点在平均海面反射面上的位置。
[0060]
观测延迟
[0061]
在本实施例中,可以通过k次采样,确定观测延迟。对于大量采样(波形),观测延迟中的主要误差源包括:单个波形的延迟海况偏差σ
ss
(i)、单个波形的噪声延迟偏差σ
noi
(i)、单个波形的大气延迟偏差σ
atm
(i)、以及单个波形除延迟海况偏差、噪声延迟偏差和大气延迟偏差之外的其他延迟偏差δσ
obs
(i)。
[0062]
优选的,观测延迟中的上述主要误差源可以表示如下:
[0063][0064]
其中,σ
obs
表示平均观测延迟偏差,一次采样对应一个波形;σ
noi
(i)主要由热噪声和散斑噪声造成,为随机误差。
[0065]
步骤102,根据模型延迟和观测延迟,对延迟海况偏差进行量化。
[0066]
延迟海况偏差的量化
[0067]
在本实施例中,可以将观测延迟中除延迟海况偏差外的其他延迟偏差与模型延迟做差,并采样求平均进行去除。即,可以按下式对延迟海况偏差进行量化:
[0068][0069]
其中,σ
ss
表示平均海况偏差,d
obs
(i)表示单个波形的观测延迟,d
mod
(i)表示当前采样的模型延迟,δσ表示观测延迟与模型延迟之差中除延迟海况偏差外的其他延迟偏差。
[0070]
优选的,上述式(2)成立的前提是需要满足如下条件:a)随机误差的影响被有效抑制。b)满足对多种海况和不同反射入射角场景的覆盖需求。c)平均海面反射面模型的镜面反射点的定位准确。d)大气延迟和平台误差可消除。其中,第一,可以通过控制采样量k满足一定的量级来保证条件a)和b)的成立:当采样量k足够多时,可以有效抑制随机误差的影响,同时实现对多种海况和不同反射入射角场景的高覆盖。第二,如前所述,模型延迟是基于模型计算得到的反射路程与直射路程之差,主要误差是由反射面相对实际海面的高程和坡度差异造成的;一般的,当镜面反射点的定位满足菲涅尔反射定律的定位时,则认为镜面反射点的定位是准确的,此时可以确定条件c)成立。第三,若船体的俯仰和摇摆等姿态变化对于观测延迟和模型延迟的影响可认为是相同的而抵消,则可以确定条件d)成立,大气延迟和平台误差可以消除或得到较好的控制。而本发明实施例依托船基实验进行采样,采样量k足够多,条件a)和b)成立;进一步的,本发明实施例基于高程和海面坡度对镜面反射点进行修正定位,修正定位后的镜面反射点满足菲涅尔反射定律的定位,条件c)成立;此外,本发明实施例对于观测延迟和模型延迟,船基场景中直射与反射信号经过大气的路径可认为相同,不会造成额外的反射延迟,此时船体的俯仰和摇摆等姿态变化对于观测延迟和模
型延迟的影响可认为是相同的而抵消,即条件d)成立。由上可见,本发明实施例所述的方案保证了式(2)的成立。
[0071]
此外,在本实施例中,可以对全部采样分别按海域和离岸距离分组量化海况偏差,对海况偏差的空间分布特征进行了讨论。例如,以海域划分,由北至南可以分为黄海、东海和南海;以离岸距离划分,可以分为近岸、近海和远海。
[0072]
步骤103,基于延迟海况偏差的量化结果,在bm4模型的基础上引入与海况独立的反射角和入射角两个参量,回归各参量系数,构建得到海况偏差参数模型。
[0073]
海况偏差参数模型构建
[0074]
本实施例中的海况偏差参数模型是基于传统的bm4模型构建得到的:在bm4模型的基础上引入与海况独立的反射角和入射角两个参量,回归各参量系数,并对回归进行评价。然后,利用海况偏差参数模型计算检验采样的延迟海况偏差,将结果与量化的延迟海况偏差进行比较,对海况偏差参数模型的性能进行验证和评价。最后,将采样按反射入射角分组,分组量化延迟海况偏差并回归模型系数,得到最终的用于预测延迟海况偏差的海况偏差参数模型。
[0075]
步骤104,根据海况偏差参数模型,预测延迟海况偏差。
[0076]
在本实施例中,对海况偏差参数模型的预测性能随反射入射角的变化进行了分析。为了比较反射入射角对海况偏差参数模型的影响,设置了两组模型参量:模型1的参量为bm4模型参量(详见gaspar et al.,1994)及反射入射角,如下述式(3);模型2的参量为bm4模型参量,如下述式(4):
[0077]
ssb1=a1 swh(b1 c1u d1u2 e1swh) f1·
θ
···
(3)
[0078]
ssb2=a2 swh(b2 c2u d2u2 e2swh)
···
(4)
[0079]
其中,ssb1和ssb2分别表示模型1和模型2计算得到的延迟海况偏差;swh表示有效波高;u表示海面风速;θ表示反射入射角;a1、b1、c1、d1、e1、f1、a2、b2、c2、d2、e2均为参量系数。
[0080]
可见,反射入射角对延迟海况偏差具有不可忽略的影响。对此,进行了如下分析:将随机选择的全部采样的量化延迟海况偏差按反射入射角升序排列,并进行一阶多项式拟合(见图4)。将采样按反射入射角从0
°
起每10
°
分为一组,每组分别量化海况偏差及回归模型系数,将采样过少的组剔除,得到gps
‑
r20
°
~70
°
共5组,bds
‑
r20
°
~60
°
共4组。各组的海况偏差均值及模型的r2见图5。
[0081]
在上述实施例的基础上,下面通过一个具体的实验过程进行说明。
[0082]
数据
[0083]
本发明使用搭载向阳红6号科考船的gps
‑
r/bds
‑
r设备采集的数据。向阳红6号于2018年5月28日由青岛出发,沿海岸线向南航行,先后穿越黄海、东海,途径厦门后继续向南,6月18日在南海结束观测。调查船、gnss
‑
r设备硬件和信号处理见。数据处理中采用10ms相干积分,船载场景下可获得较高的信噪比。选择1s内100个路径延迟的中值,以减小不确定性,结合大量采样的平均,可以较好地控制随机误差。本发明随机选择了10000个采样点,bds
‑
r和gps
‑
r各5000个,其中3000个用于模型构建,2000个用于模型验证。在镜面点修正定位中,部分采样由于迭代次数过多而被剔除。
[0084]
构建平均海面反射面模型需要综合多种地球物理参量,修正反射面的高程和坡度误差。高程误差修正使用比延迟海况偏差低一个数量级及以上的地球物理参量高程,包括
由egm2008模型计算的大地水准面差距、tpxo模型的潮汐高程、dtu15的海面动态地形高程。在此基础上引入global gravity model plus(ggmplus)重力场垂线偏差修正海面坡度误差。gnss轨道信息由全球导航卫星系统服务提供的gnss星历文件中获得。接收机的位置由船载导航天线的大地坐标获得。除特别说明,本发明使用的位置信息是基于ecef wgs
‑
84坐标系。
[0085]
有效波高和海面风速使用欧洲中期天气预报中心的第五代再分析数据era5。有效波高的范围为接近0m至2.75m,海面风速的范围为接近0m/s至约13m/s,覆盖了从接近镜面的平静海面到粗糙海面的常见海况。
[0086]
延迟海况偏差的量化
[0087]
gps的观测延迟、模型延迟、二者的差量化的海况偏差、其标准差及平均反射入射角见表1。由于包含海况和残余噪声等引入的额外延迟,观测延迟大于模型延迟。反射和直射路程之差的变化造成模型延迟大小的变化。在船载场景下,可认为直射路径与反射的入射路径平行,当反射入射角接近90度时,模型延迟接近0,而当反射入射角接近0度时,模型延迟接近接收机天线距水面高度的2倍。因此,反射入射角越大,模型的反射路程与直射路程越接近,模型延迟应该越小,这与gps与bds在d
mod
和平均反射入射角的差相符。
[0088][0089]
表1,反射延迟及量化的延迟海况偏差示意表
[0090]
可见,量化的海况偏差平均值为~1.3m,这与hajj的观点相符。波形的获取采用了与rius的研究相同的方法,海况偏差的标准偏差接近4m,与rius的研究结果相符,噪声对延迟的影响已被有效抑制,海况偏差的量化较为准确。量化结果中包含未完全消除的噪声误差和系统误差,后者来自观测延迟和模型延迟。模型延迟中的系统误差主要是由直接和反射天线相位中心之间的距离造成的,二者的相对位置随入射面、入射角和船体姿态而变化,对模型延迟引入的误差估计为分米级。
[0091]
延迟海况偏差空间分布特征
[0092]
中国海5月至6月的海况偏差具有明显的海域、纬度、离岸距离差异。海况偏差整体呈现由北向南先增大,再减小的趋势。东海的海况偏差最高,黄海次之,南海最低,约为东海的一半。离岸越近,海况偏差越大,见表2。海况偏差最大的区域在东海南部和南海北部的台湾海峡西侧近岸海域(25
°
n~22
°
n,116
°
e~118
°
e),这与离岸较近导致的波浪不确定增加和信号干扰可能有关。此外,黄海南部和东海北部,以及南海北部的东南海域也有一些较大值分布。海况偏差最小的区域主要集中在黄海北部和南海西北部。从黄海向南到东海北部(35
°
n~30
°
n),海况偏差逐渐增大。东海南部及南海北部由北向南海况偏差有所减小。在南海北部,测段的经纬度覆盖均较大,可观察到各测段均具有由西北向东南(远离西北岸方向)逐渐增大的趋势。
[0093]
黄海1.3648m近岸1.9447m东海2.0092m近海1.7205m
南海0.9038m远海0.8905m
[0094]
表2,延迟海况偏差空间分布均值示意表
[0095]
海况偏差参数模型
[0096][0097]
表3,延迟海况偏差模型参量系数示意表
[0098]
如前所述,为了比较反射入射角对海况偏差参数模型的影响,设置了两组模型参量:模型1的参量为bm4模型参量及反射入射角;模型2的参量为bm4模型参量。对经平滑的海况延迟及模型参量进行回归,得到的参量系数如上表3所示。
[0099][0100]
表4,延迟海况偏差模型主要评价指标示意表
[0101]
如上表4所示,r2是皮尔逊相关系数的平方,表示模型所解释的方差的比例。可见,模型1的r2较大,可以解释量化的海况偏差中的大部分方差。f检验值较大,p值均为0。残差非常小,残差异常点占比较小,且异常点基本集中在个别测段而不是广泛分布,见图2。模型1未能解释的方差主要来自消除不彻底的噪声和系统误差。其中,直接和反射天线相位中心相对位置的变化导致的分米级延迟误差,推测是未解释方差的重要部分。在后续的实验中通过改进实验设备和收集船体姿态记录,有望将该误差控制在可接受的范围。模型1相比模型2具有更高的r2,其提升率超过15%,表明加入反射入射角参量使模型具有更强的方差解释能力。反射入射角参量对模型是必要的,相比仅适用海况相关参量的模型2,新型的模型1更适合gnss
‑
r。
[0102]
计算经平滑的量化海况偏差与模型1计算的海况偏差的差来检验模型。bds
‑
r为0.4014m,gps
‑
r为
‑
0.0472m,偏差较小。二者的相关性bds
‑
r为71.47%,gps
‑
r为60.54%,相关性较高(见图3),表明模型可以获得可靠的延迟海况偏差统计性预测结果和变化趋势。两曲线明显在中低频变化上具有更好的一致性,且在该尺度的平均差异更小。分米级的天线相对位置变化主要引入了高频误差。考虑到船载采样覆盖的空间尺度,模型对于海况延迟的中尺度和大尺度变化的预测较为准确,可为天基gnss
‑
r海面测高等应用提供中、大尺度的延迟海况偏差修正支持,可获得合理的统计性修正结果。结合该尺度下延迟海况偏差的空间分布特征,针对性地进行建模和修正,可以为卫星gnss
‑
r测高的全球精细化海况误差修正提供支持。bds
‑
r的验证相关性高于gps
‑
r,推测是由二者反射入射角的差异导致。
[0103]
反射入射角对海况偏差参数模型的影响
[0104]
在前面的研究中我们发现反射入射角对延迟海况偏差具有不可忽略的影响,我们对此进行了如下分析。将随机选择的全部采样的量化延迟海况偏差按反射入射角升序排列,并进行一阶多项式拟合(见图4)。随反射入射角增大,海况偏差逐渐增大。将采样按反射
入射角从0
°
起每10
°
分为一组,每组分别量化海况偏差及回归模型系数,将采样过少的组剔除,得到gps
‑
r20
°
~70
°
共5组,bds
‑
r20
°
~60
°
共4组。各组的海况偏差均值及模型的r2见图5。除bds
‑
r的50
°
~60
°
组以外,总的来说随反射入射角增大,海况偏差呈增大趋势,而模型r2呈下降趋势。推测这是由于随反射入射角增大(仰角减小),反射信号的信噪比、反射波形的相关功率、延迟精度均下降,观测延迟中噪声的影响增大。另一方面,随着反射入射角增大,模型延迟有所减小。因此,延迟海况偏差中观测延迟的影响增大,噪声的影响增大,可能导致模型的r2降低。虽然这种下降并不明显,但我们认为低反射入射角(高仰角)场景下的模型方差解释能力更强。这也解释了为什么反射入射角较小的bds
‑
r海况偏差模型的r2大于gps
‑
r。导致二者反射入射角差异的影响因素包含可见卫星数量差异。bds的星座和轨道设计使其在亚太地区具有更好的覆盖,这可能有利于中国海延迟海况偏差的量化和建模。
[0105]
在上述实施例的基础上,本发明还公开了一种gps
‑
r/bds
‑
r反射延迟海况偏差的量化与预测系统,包括:确定模块,用于确定模型延迟和观测延迟;量化模块,用于根据模型延迟和观测延迟,对延迟海况偏差进行量化;模型构建模块,用于基于延迟海况偏差的量化结果,在bm4模型的基础上引入与海况独立的反射角和入射角两个参量,回归各参量系数,构建得到海况偏差参数模型;预测模块,用于根据海况偏差参数模型,预测延迟海况偏差。
[0106]
对于系统实施例而言,由于其与方法实施例相对应,所以描述的比较简单,相关之处参见方法实施例部分的说明即可。
[0107]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0108]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。