1.本公开涉及测量技术领域,尤其涉及一种测量系统和方法。
背景技术:
2.在集成电路制造领域,为提高产品良率,需要对晶圆的三维形貌进行测量,以检查晶圆制造的工艺过程是否符合标准。基于白光干涉技术的三维形貌测量方式以其无接触、快速、高精度等特点在集成电路检测领域广泛使用。
3.白光干涉技术以相干长度很短的白光作为光源,通过干涉信号强度的峰值可以定位被测物体的表面形貌。
技术实现要素:
4.根据本公开实施例的一方面,提供一种测量系统,包括:光源,被配置为产生原始光束,其中,从被测物体的被测区域返回的所述原始光束形成返回光束;光学组件,被配置为根据所述返回光束得到待处理光束,其中,至少部分所述待处理光束为第一光束;第一探测装置,被配置为根据所述第一光束得到第一探测信息;移动设备,被配置为使所述光学组件与所述被测物体沿所述光学组件的光轴方向相对移动;和处理系统,被配置为根据多个第一时刻中每个第一时刻下的所述第一探测信息,确定在每个第一时刻下所述光学组件与所述被测物体的固定平面之间的实际距离。
5.在一些实施例中,所述光学组件包括:第一分光器,被配置为将所述原始光束分为参考光束和入射到所述被测区域的物光束,其中,从所述被测区域返回所述光学组件的所述物光束形成所述返回光束;和参考镜,被配置为使所述参考光束沿预设轨迹传播以得到预干涉光束,其中,所述预干涉光束和所述返回光束干涉以得到所述待处理光束;所述第一探测信息包括所述待处理光束中预定波长的光的强度。
6.在一些实施例中,所述处理系统被配置为确定在每个第一时刻下所述光学组件与被测物体的固定平面之间的实际距离包括:控制所述移动设备以使所述光学组件与所述被测物体沿所述光轴方向相对移动,以在多个第二时刻下使所述光学组件与所述固定平面之间具有期望的多个预定距离;获取所述多个第二时刻中的每个第二时刻下的所述第一探测信息;和根据所述多个预定距离和每个第二时刻下的所述多个第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的所述实际距离。
7.在一些实施例中,所述处理系统被配置为根据所述多个预定距离和每个第二时刻下的所述多个第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离包括:对所述多个预定距离中的每个预定距离进行线性处理,以得到移动参量;以每个第二时刻下的所述移动参量和待求参量之间的差为自变量,以每个第二时刻下的所述第一探测信息为因变量对待拟合函数进行拟合,以得到拟合函数;和根据所述拟合函数和所述多个第一时刻下的所述第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离。
8.在一些实施例中,所述光学组件包括:第一分光器,被配置为将所述原始光束分为参考光束和入射到所述被测区域的物光束,其中,从所述被测区域返回所述光学组件的所述物光束形成所述返回光束;和参考镜,被配置为使所述参考光束沿预设轨迹传播以得到预干涉光束,其中,所述预干涉光束和所述返回光束干涉以得到所述待处理光束;所述第一探测信息包括所述待处理光束中预定波长的光的强度;所述待拟合函数为:i=a cos r(x-x0) b,其中,所述线性处理包括乘以2π/λ,r=1;或者,所述线性处理包括乘以1,r=2π/λ,λ为所述预定波长光的波长;所述处理系统被配置为以每个第二时刻下的所述移动参量和待求参量之间的差为自变量,以每个第二时刻下的所述第一探测信息为因变量对待拟合函数进行拟合,以得到拟合函数包括:以每个第二时刻下的所述移动参量作为所述待拟合函数中的x、以每个第二时刻下所述预定波长的光的强度作为所述待拟合函数中的i,对所述待拟合函数进行拟合,以得到a、所述待求参量x0和b,从而得到所述拟合函数;根据所述拟合函数和所述多个第一时刻下的所述第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离包括:以每个第一时刻下所述预定波长的光的强度作为所述拟合函数中的i,计算所述拟合函数中的x作为每个第一时刻下的所述移动参量;和根据每个第一时刻下的所述移动参量,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离。
9.在一些实施例中,所述参考镜被配置为通过反射所述参考光束,使所述参考光束沿预设轨迹传播以得到预干涉光束;所述参考镜和所述第一分光器均为半透半反镜,并且,所述参考镜和所述第一分光器平行设置;或者,所述参考镜为反射镜。
10.在一些实施例中,所述第一探测装置包括:光栅和滤波片中的一个;和光强探测器。
11.在一些实施例中,所述测量系统还包括:第一光阑,被配置为阻挡所述待处理光束中与所述待测处理光束的中心轴之间的夹角大于第一预设夹角的部分进入所述第一探测装置。
12.在一些实施例中,所述测量系统还包括:第二探测装置,被配置为根据第二光束得到第二探测信息,所述第二光束为部分所述返回光束或部分所述待处理光束,所述第二探测信息表征所述光学组件与所述被测区域之间在所述光学组件的光轴方向上的相对距离;所述处理系统还被配置为获取所述第二探测信息为预设探测信息时的第一时刻作为特征时刻;获取所述特征时刻下的所述光学组件与所述固定平面之间的所述实际距离;根据所述特征时刻下的所述光学组件与所述固定平面之间的所述实际距离,确定所述被测区域的高度信息。
13.在一些实施例中,所述第二探测装置被配置为根据第二光束得到第二探测信息包括:根据所述第二光束得到探测图像;和根据所述探测图像得到所述第二探测信息,所述第二探测信息包括第二光束的光强和所述探测图像的对比度中的至少一项。
14.在一些实施例中,所述测量系统还包括:第二分光器,被配置为对所述返回光束或所述待处理光束进行分光,以得到所述第二光束。
15.在一些实施例中,所述光学组件还包括:第一镜头,被配置为收集所述返回光束,所述第一光束由至少部分所述第一镜头收集的所述返回光束形成;或者,所述第一镜头被配置为收集所述待处理光束,所述第一光束由至少部分所述第一镜头收集的所述待处理光
束形成。
16.在一些实施例中,当所述第一镜头被配置为收集所述返回光束时,所述第二分光器被配置为将所述第一镜头收集的所述返回光束进行分光,以形成所述第二光束和第三光束,所述光学组件被配置为根据所述第三光束得到所述待处理光束;当所述第一镜头被配置为收集所述待处理光束时,所述第二分光器被配置为对所述第一镜头收集的所述待处理光束进行分光,以形成所述第一光束和所述第二光束。
17.在一些实施例中,所述光学组件还包括:第二镜头,被配置为收集所述第二光束。
18.在一些实施例中,所述第二分光器被配置为对所述返回光束进行分光,以得到所述第二光束,所述第二镜头使所述第二光束的中心轴平行于所述光学组件的移动方向;所述第二分光器与所述光学组件固定连接。
19.在一些实施例中,所述光学组件被配置为相对于所述第二分光器移动。
20.在一些实施例中,所述第二分光器被配置为将所述返回光束进行分光,以得到所述第二光束;所述光学组件包括镜头,所述镜头被配置为收集所述返回光束并使所述返回光束传播至所述第二分光器,或者所述镜头被配置为收集所述第二光束;所述测量系统还包括:第二光阑,被配置为阻挡所述第二光束中与所述第二光束的中心轴之间的夹角大于第二预设夹角的部分进入所述第二探测装置,所述第二光阑和所述第二探测装置均与所述镜头的焦平面共轭。
21.在一些实施例中,所述原始光束包括第一原始光束和第二原始光束;所述光源包括:第一子光源,被配置为产生所述第一原始光束,和第二子光源,被配置为产生所述第二原始光束;所述返回光束包括第一返回光束和第二返回光束,所述第一返回光束为从所述被测区域返回的所述第一原始光束,所述第二返回光束为从所述被测区域返回的所述第二原始光束;所述光学组件包括:第一光学组件,被配置为根据所述第一返回光束形成所述待处理光束,所述第一光束为所述待处理光束,和第二光学组件,被配置为收集所述第二返回光束,所述第二光束为所述第二返回光束,所述第一光学组件和第二光学组件固定连接。
22.在一些实施例中,所述第一光学组件还被配置为收集所述第一原始光束,并使所述第一原始光束到达所述被测区域;所述第一光学组件包括:色散棱镜,被配置为使所述第一原始光束中不同波长的光汇聚至所述第一光学组件的光轴的不同位置。
23.在一些实施例中,所述测量系统还包括:数据采集系统,被配置为在每个第一时刻发出同步触发信号;所述第一探测装置被配置为响应于所述同步触发信号,根据所述第一光束得到所述第一探测信息;所述第二探测装置被配置为响应于所述同步触发信号,根据所述第二光束得到所述第二探测信息。
24.在一些实施例中,所述第二探测信息包括所述第二光束的光强;在所述特征时刻下的所述第二光束的光强大于在所述多个第一时刻中除所述特征时刻外的任意一个第一时刻下所述第二光束的光强。
25.在一些实施例中,所述被测区域包括至少一个子区域,所述探测图像包括与所述至少一个子区域对应的至少一个像素,每个像素被配置为获取一个子区域的第二光束;所述第二探测信息包括每个子区域形成的第二光束的光强,其中,在任一子区域的所述特征时刻下,该子区域的像素的灰阶值大于在所述多个第一时刻中除所述特征时刻外的任意一个第一时刻下该像素的灰阶值;所述处理系统被配置为根据所述特征时刻下所述光学组件
与所述固定平面之间的所述实际距离,确定所述被测区域的高度信息包括:根据每个子区域的特征时刻下所述光学组件与所述固定平面之间的所述实际距离,确定该子区域的高度信息,从而得到所述被测区域的高度信息。
26.根据本公开实施例的另一方面,提供一种测量方法,包括:光源产生原始光束,其中,从被测物体的被测区域返回的所述原始光束为返回光束;光学组件根据所述返回光束得到待处理光束,至少部分所述待处理光束为第一光束;根据所述第一光束得到第一探测信息;使所述光学组件与所述被测物体沿所述光学组件的光轴方向相对移动;和根据多个第一时刻中每个第一时刻下的所述第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离。
27.在一些实施例中,确定在每个第一时刻下所述光学组件与被测物体之间的实际距离包括:使所述光学组件与所述被测物体沿所述光轴方向相对移动,以在多个第二时刻下使所述光学组件与所述固定平面之间具有期望的多个预定距离;获取所述多个第二时刻中的每个第二时刻下的所述第一探测信息;和根据所述多个预定距离和每个第二时刻下的所述多个第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的所述实际距离。
28.在一些实施例中,根据所述多个预定距离和每个第二时刻下的所述多个第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离包括:对所述多个预定距离中的每个预定距离进行线性处理,以得到移动参量;以每个第二时刻下的所述移动参量和待求参量之间的差为自变量,以每个第二时刻下的所述第一探测信息为因变量对待拟合函数进行拟合,以得到拟合函数;和根据所述拟合函数和所述多个第一时刻下的所述第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离。
29.在一些实施例中,所述光学组件包括第一分光器和反射镜,所述测量方法还包括:所述第一分光器将所述原始光束分为参考光束和入射到所述被测区域的物光束,其中,从所述被测区域返回所述光学组件的所述物光束为所述返回光束;和所述参考镜使所述参考光束沿预设轨迹传播以得到预干涉光束,其中,所述预干涉光束和所述返回光束干涉以得到所述待处理光束;所述第一探测信息包括所述待处理光束中预定波长的光的强度;所述待拟合函数为:i=a cos r(x-x0) b,其中,所述线性处理包括乘以2π/λ,r=1;或者,所述线性处理包括乘以1,r=2π/λ,λ为所述预定波长光的波长;以每个第二时刻下的所述移动参量和待求参量之间的差为自变量,以每个第二时刻下的所述第一探测信息为因变量对待拟合函数进行拟合,以得到拟合函数包括:以每个第二时刻下的所述移动参量作为所述待拟合函数中的x、以每个第二时刻下所述预定波长的光的强度作为所述待拟合函数中的i,对所述待拟合函数进行拟合,以得到a、所述待求参量x0和b,从而得到所述拟合函数;根据所述拟合函数和所述多个第一时刻下的所述第一探测信息,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离包括:以每个第一时刻下所述预定波长的光的强度作为所述拟合函数中的i,计算所述拟合函数中的x作为每个第一时刻下的所述移动参量;和根据每个第一时刻下的所述移动参量,确定在每个第一时刻下所述光学组件与所述固定平面之间的实际距离。
30.在一些实施例中,所述测量方法还包括:根据第二光束得到第二探测信息,所述第
二光束为部分所述返回光束或部分所述待处理光束,所述第二探测信息表征所述光学组件与所述被测区域之间的相对位置;获取所述第二探测信息为预设探测信息时的第一时刻作为特征时刻;获取所述特征时刻下的所述光学组件与所述固定平面之间的所述实际距离;和根据所述特征时刻下的所述光学组件与所述固定平面之间的所述实际距离,确定所述被测区域的高度信息。
31.在一些实施例中,根据第二光束得到第二探测信息包括:根据所述第二光束得到探测图像;和根据所述探测图像得到所述第二探测信息,所述第二探测信息包括第二光束的光强和所述探测图像的对比度中的至少一项。
32.在一些实施例中,所述第二探测信息包括所述第二光束的光强;在所述特征时刻下的所述第二光束的光强大于在所述多个第一时刻中除所述特征时刻外的任意一个第一时刻下所述第二光束的光强。
33.在一些实施例中,所述测量方法还包括:根据多个所述被测区域相对于同一基准面的所述高度信息获取所述被测物体的形貌。
34.通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征、方面及其优点将会变得清楚。
附图说明
35.附图构成本说明书的一部分,其描述了本公开的示例性实施例,并且连同说明书一起用于解释本公开的原理,在附图中:
36.图1是根据本公开一些实施例的测量系统的结构示意图;
37.图2是根据本公开另一些实施例的测量系统的结构示意图;
38.图3是根据本公开又一些实施例的测量系统的结构示意图;
39.图4是根据本公开一些实现方式的确定在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离的流程示意图;
40.图5示出了图4中的步骤406的一个具体实现方式;
41.图6是根据本公开又一些实施例的测量系统的结构示意图;
42.图7是根据本公开再一些实施例的测量系统的结构示意图;
43.图8是根据本公开还一些实施例的测量系统的结构示意图;
44.图9是根据本公开一些实施例的测量方法的流程示意图;
45.图10是根据本公开另一些实施例的测量方法的流程示意图。
46.应当明白,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。此外,相同或类似的参考标号表示相同或类似的构件。
具体实施方式
47.现在将参照附图来详细描述本公开的各种示例性实施例。对示例性实施例的描述仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。本公开可以以许多不同的形式实现,不限于这里所述的实施例。提供这些实施例是为了使本公开透彻且完整,并且向本领域技术人员充分表达本公开的范围。应注意到:除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、材料的组分、数字表达式和数值应被解释为仅仅是示
例性的,而不是作为限制。
48.本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的部分。“包括”或者“包含”等类似的词语意指在该词前的要素涵盖在该词后列举的要素,并不排除也涵盖其他要素的可能。“上”、“下”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
49.在本公开中,当描述到特定部件位于第一部件和第二部件之间时,在该特定部件与第一部件或第二部件之间可以存在居间部件,也可以不存在居间部件。当描述到特定部件连接其它部件时,该特定部件可以与所述其它部件直接连接而不具有居间部件,也可以不与所述其它部件直接连接而具有居间部件。
50.本公开使用的所有术语(包括技术术语或者科学术语)与本公开所属领域的普通技术人员理解的含义相同,除非另外特别定义。还应当理解,在诸如通用字典中定义的术语应当被解释为具有与它们在相关技术的上下文中的含义相一致的含义,而不应用理想化或极度形式化的意义来解释,除非这里明确地这样定义。
51.对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为说明书的一部分。
52.发明人注意到,带动光学组件和被测物体相对移动时,由于移动误差、测量系统的振动、环境振动等因素,期望使光学组件与被测物体的固定平面之间具有的预定距离往往与光学组件与被测物体的固定平面之间的实际距离并不相同。因此,根据预定距离来测量被测物体的高度信息,将导致测量结果不准确。
53.有鉴于此,本公开实施例提供了如下技术方案。
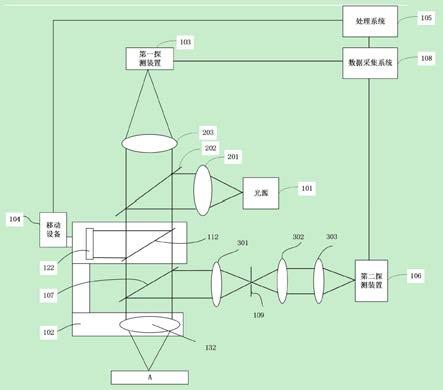
54.图1是根据本公开一些实施例的测量系统的结构示意图。
55.如图1所示,测量系统可以包括光源101、光学组件102、第一探测装置103、移动设备104和处理系统105。
56.光源101被配置为产生原始光束。在一些实施例中,原始光束可以为宽光谱光束,例如白光、红外光、紫外光中的一者或多者组合。这里,从被测物体a(例如晶圆等)的被测区域返回的原始光束为返回光束。
57.在一些实施例中,光源101产生的原始光束可以直接入射到被测物体a。在另一些实施例中,参见图1,光源101产生的原始光束可以经由光学组件102入射到被测物体a。例如,光源101产生的原始光束可以经整形镜组201整形后入射到分光器202,经分光器202反射后入射到光学组件102,进而经由光学组件102入射到被测物体a。例如,整形镜组201可以对光源101产生的原始光束进行准直、滤波等整形操作。
58.光学组件102被配置为根据返回光束得到待处理光束。这里,至少部分待处理光束为第一光束。
59.在一些实施例中,光学组件102可以为干涉物镜。这种情况下,待处理光束可以是干涉光束。在另一些实施例中,光学组件102可以为共聚焦物镜。这种情况下,待处理光束可以是从被测物体a返回的返回光束。光学组件102被配置为将原始光束分为参考光束和入射到被测区域的物光束,其中,从被测区域返回光学组件的物光束形成返回光束,光学组件102还被配置为使参考光束与返回光束干涉。
60.例如,光学组件102包括第一分光器112和参考镜122,第一分光器112被配置为将
原始光束分为参考光束和入射到被测物体a的被测区域的物光束;参考镜122被配置为使参考光束沿预设轨迹传播,以得到预干涉光束,其中,预干涉光束和返回光束干涉以得到待处理光束。
61.在一个实施例中,第一分光器112被配置为将原始光束分为参考光束和入射到被测物体a的被测区域的物光束。这里,从被测物体a的被测区域返回光学组件102的物光束为返回光束。参考镜122被配置为通过反射参考光束使参考光束沿预设轨迹传播以得到预干涉光束。这里,预干涉光束和返回光束干涉以得到待处理光束。例如,参考镜122和第一分光器112均为半透半反镜,并且,参考镜122和第一分光器112平行设置。然而,本公开实施例并不限于此。例如,在其他的实施例中,参考镜122可以是反射镜(例如图6所示实施例)。
62.在其他实施例中,参考镜122被配置为折射或衍射参考光束以得到预干涉光束。例如,参考镜122为折射元件或衍射元件。
63.第一探测装置103被配置为根据第一光束得到第一探测信息。在一些实施例中,待处理光束是由上述反射光束和返回光束干涉得到的干涉光束。这种情况下,第一探测信息可以包括待处理光束中预定波长的光的强度。例如,待处理光束包括多个波长的光。预定波长的光可以是多个波长的光中的任意一个波长的光。
64.移动设备104被配置为使光学组件102与被测物体a沿光学组件102的光轴方向相对移动。
65.例如,移动设备104可以在处理系统105的控制下带动光学组件102沿光学组件102的光轴方向相对于被测物体a移动。又例如,移动设备104可以在处理系统105的控制下带动被测物体a沿光学组件102的光轴方向相对于光学组件102移动。这里,光学组件102的光轴方向可以理解为进入光学组件102的返回光束的中心轴方向,例如图1中的双向箭头所指方向。在一些实施例中,移动设备104可以是相移器。
66.沿光学组件102的光轴方向相对于被测物体a移动指的是光学组件102和被测物体a的移动方向具有沿光学组件102的光轴方向的分量,只要光学组件102和被测物体a的移动方向与光学组件102的光轴方向不垂直即可。
67.处理系统105被配置为根据多个第一时刻中每个第一时刻下的第一探测信息,确定在每个第一时刻下光学组件102与被测物体a的固定平面之间的实际距离。这里,被测物体a的固定平面可以是被测物体a的表面的任意区域所确定的平面。换言之,可以以被测物体a的任意平面作为被测物体a的固定平面。
68.应理解,在不同的第一时刻下,光学组件102与被测物体a的固定平面之间的实际距离不同。例如,处理系统105后续可以根据在每个第一时刻下光学组件102与被测物体a的固定平面之间的实际距离,确定被测区域的高度信息。
69.处理系统105可以是计算机等其他能够进行处理的设备。在一些实施例中,处理系统105可以包括存储器和耦接至存储器的处理器,处理器可以基于存储在存储器上的指令执行各种操作,例如,确定在每个第一时刻下光学组件102与被测物体a的固定平面之间的实际距离以及后文提到的操作。存储器例如可以包括系统存储器、固定非易失性存储介质等。系统存储器例如可以存储有操作系统、应用程序、引导装载程序(boot loader)以及其他程序等。
70.上述实施例中,光学组件102根据返回光束得到待处理光束,第一探测装置103根
据待处理光束的至少一部分(即第一光束)得到第一探测信息。处理系统105根据多个第一时刻中每个第一时刻下的第一探测信息,确定在每个第一时刻下光学组件102与被测物体a的固定平面之间的实际距离。这样的方式下,利用多个第一时刻下的第一探测信息可以得到在每个第一时刻下光学组件102与被测物体a的固定平面之间的实际距离。基于在每个第一时刻下光学组件102与被测物体a的固定平面之间的实际距离可以更准确地进行后续操作,例如,可以更准确地确定被测物体a的被测区域的高度信息等。
71.在一些实施例中,参见图1,测量系统还可以包括第二探测装置106。第二探测装置106被配置为根据第二光束得到第二探测信息。这里,第二光束为部分待处理光束。例如,测量系统还包括第二分光器107,被配置为对待处理光束进行分光,以得到第二光束。例如,透过第二分光器107的待处理光束为第一光束,而被第二分光器107反射的待处理光束为第二光束,反之亦可。在其他的实施例中,第二光束可以为部分返回光束。这种情况下,第二分光器107被配置为对返回光束进行分光,以得到第二光束。后文将结合其他实施例(例如图6所示实施例)进行说明。
72.第二探测信息能够表征光学组件102与被测物体a的被测区域之间沿光学组件光轴方向的相对距离,即,第二探测信息随相对距离的变化而变化;根据第二探测信息可以得到光学组件102与被测物体a的被测物体a的被测区域之间的相对距离。
73.在一些实施例中,第二探测装置106可以根据第二光束得到探测图像(例如干涉图像或被测物体a的被测区域的图像),进而根据探测图像得到第二探测信息。第二探测装置106例如可以是照相机、摄像机等。在其他实施例中,所述第二探测装置106可以为单个光电二极管或光电倍增管。
74.这里,第二探测信息可以包括第二光束的光强和探测图像的对比度中的至少一项。例如,第二探测信息可以包括第二光束的光强。又例如,第二探测信息可以包括根据第二光束得到的探测图像的对比度。再例如,第二探测信息可以包括第二光束的光强和探测图像的对比度。
75.处理系统105还被配置为获取第二探测信息为预设探测信息时的第一时刻作为特征时刻;获取特征时刻下的光学组件102与被测物体a的固定平面之间的实际距离;根据特征时刻下的光学组件102与被测物体a的固定平面之间的实际距离,确定被测区域的高度信息。
76.在一些实施例中,第二探测信息可以包括第二光束的光强。在特征时刻下的第二光束的光强大于在多个第一时刻中除特征时刻外的任意一个第一时刻下第二光束的光强。换言之,在特征时刻下的第二光束的光强最大。例如,在特征时刻下,参考光束的光程与物光束的光程相等。又例如,在特征时刻下,光学组件102与被测物体a的被测区域之间的距离等于光学组件102的焦距。
77.对于不同的被测区域来说,在特征时刻下,光学组件102与不同的被测区域之间的距离相同。故,特征时刻下的光学组件102与被测物体a的固定平面之间的实际距离可以反应被测区域的高度。例如,对于被测区域a1来说,特征时刻下的光学组件102与被测物体a的固定平面之间的实际距离为h1;对于被测区域a2来说,特征时刻下的光学组件102与被测物体a的固定平面之间的实际距离为h2。h1与h2之间的差值即为被测区域a1和被测区域a2的高度差。
被配置为使第一光束中的多个波长的光中预定波长的光到达光强探测器123,而多个波长中其他波长的光不会到达光强探测器123。换言之,滤波片113’仅允许预定波长的光通过。这种情况下,光强探测器123可以直接探测到预定波长的光的强度。
89.在一些实施例中,参见图2和图3,测量系统还可以包括第一光阑109,例如孔径光阑。第一光阑109被配置为阻挡待处理光束中与待测处理光束的中心轴之间的夹角大于第一预设夹角的部分进入第一探测装置103。换言之,待处理光束中与待测处理光束的中心轴之间的夹角小于或等于第一预设夹角的部分才能进入第一探测装置103。应理解,第一预设夹角可以根据实际情况确定。这种情况下,第一探测装置103无需探测整个待处理光束,减小了待处理光束边缘的光的不利影响,提高了检测精度。
90.下面结合图4和图5介绍处理系统确定在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离的一些具体实现方式。
91.图4是根据本公开一些实现方式的确定在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离的流程示意图。
92.在步骤402,控制移动设备以使光学组件与被测物体沿光轴方向相对移动,以在多个第二时刻下使光学组件与固定平面之间具有期望的多个预定距离。
93.这里,多个第二时刻与多个第一时刻可以相同、也可以不同,或者,可以部分相同。
94.控制移动设备以使光学组件与被测物体沿光轴方向相对移动包括:移动设备使光学组件移动,或者移动设备使被测物体移动中的一者或两者组合。
95.在步骤404,获取多个第二时刻中的每个第二时刻下的第一探测信息。
96.在步骤406,根据多个预定距离和每个第二时刻下的多个第一探测信息,确定在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离。
97.当所述移动设备仅使光学组件移动时,确定在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离包括确定每个第一时刻下光学组件与任一固定平面之间的距离;当移动设备仅使被测物体移动时,确定在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离包括确定每个第一时刻下光学组件与任一固定平面之间的距离。
98.例如,步骤406可以通过图5所示步骤416-步骤436来实现。
99.在步骤416,对多个预定距离中的每个预定距离进行线性处理,以得到移动参量。例如,对每个预定距离乘以某个常量,以得到移动参量。
100.在步骤426,以每个第二时刻下的移动参量和待求参量之间的差为自变量,以每个第二时刻下的第一探测信息为因变量对待拟合函数进行拟合,以得到拟合函数。
101.例如,待拟合函数例如可以包括三角函数展开式、多项式、傅里叶展开式等。
102.在步骤436,根据拟合函数和多个第一时刻下的第一探测信息,确定在每个第一时刻下光学组件与固定平面之间的实际距离。
103.下面以光学组件102包括第一分光器112和参考镜122、待拟合函数为三角函数为例,介绍步骤416-步骤436的一些具体实现方式。第一分光器112和参考镜122的功能可以参照上文的描述,在此不再赘述。
104.该实现方式中,第一探测信息包括待处理光束中预定波长的光的强度。待拟合函数为:i=a cos r(x-x0) b。这里,a为预定波长的光的光强的幅度,x0为待求参量,b为预定波长的光的光强的平均强度,r为1或2π/λ,λ为预定波长光的波长。在步骤416中的线性处
理为乘以2π/λ的情况下,r=1,移动参量为相移量;在步骤416中的线性处理为乘以1的情况下,r=2π/λ,移动参量等于预定距离。
105.例如,以每个第二时刻下的移动参量作为待拟合函数中的x、以每个第二时刻下预定波长的光的强度作为待拟合函数中的i,对待拟合函数进行拟合,以得到a、待求参量x0和b,从而得到拟合函数。
106.例如,多个第二时刻下预定波长的光的强度分别为i1、i2、i3…
,多个第二时刻下的移动参量为x
01
、x
02
、x
03
…
。以x
01
、x
02
、x
03
…
分别作为x、以i1、i2、i3…
分别作为i,对上式进行拟合,例如最小二乘法拟合等,从而可以得到a、x0和b,即得到了拟合函数。
107.在得到a、x0和b后,即得到了预定波长的光的光强i与移动参量x的关系式。之后,以每个第一时刻下预定波长的光的强度作为拟合函数中的i,计算拟合函数中的x作为每个第一时刻下的移动参量。
108.例如,将多个第一时刻下预定波长的光的强度i1’
、i2’
、i3’…
代入拟合函数,即可得到多个移动参量x
11
、x12、x
13
…
。
109.然后,根据每个第一时刻下的移动参量,确定在每个第一时刻下光学组件与固定平面之间的实际距离。
110.例如,每个第一时刻下光学组件与固定平面之间的实际距离等于每个第一时刻下的移动参量。又例如,每个第一时刻下光学组件与固定平面之间的实际距离等于每个第一时刻下的移动参量与2π/λ的比值。
111.预定波长的光的光强与移动参量之间的关系符合上式,故以上式为待拟合函数能够简化计算过程,提高检测速度。
112.需要说明的是,处理系统105在对每个被测区域进行测量时,均可以按照上述方式拟合出相应的a、x0和b,然后进行后续处理。这样的方式得到的第一时刻下光学组件与固定平面之间的实际距离更准确,从而可以得到更准确的被测区域的高度信息。
113.还需要说明的是,当待拟合函数为三角函数展开式、多项式、傅里叶展开式时,可以对待拟合函数进行三角函数拟合、多项式拟合或傅里叶级数拟合。
114.图6是根据本公开又一些实施例的测量系统的结构示意图。图7是根据本公开再一些实施例的测量系统的结构示意图。
115.下面结合图1-图3、以及图6-图7介绍根据本公开一些实施例的测量系统。需要说明的是,在后面的描述中,不同实施例中相同或类似的部件的功能不再赘述。
116.在一些实施例中,光学组件102可以包括第一镜头132。第一镜头132可以被配置为收集返回光束或待处理光束。下面结合不同实施例进行说明。
117.在一些实施例中,参见图6,光学组件102还包括第一镜头132,被配置为收集返回光束。这种情况下,第一光束由至少部分第一镜头132收集的返回光束形成。
118.在一些实施例中,参见图6,当第一镜头132被配置为收集返回光束时,第二分光器107被配置为将第一镜头132收集的返回光束进行分光,以形成第二光束和第三光束。光学组件102被配置为根据第三光束得到待处理光束。第二探测装置106根据第二光束得到第二探测信息。例如,透过第一分光器112的第三光束与被第一分光器112反射的反射光束干涉以得到待处理光束。
119.在一些实施例中,参见图6,在第一镜头132被配置为收集返回光束的情况下,光学
组件102被配置为相对于第二分光器107移动。例如,移动设备104带动光学组件102移动的情况下,第二分光器107相对静止。
120.在另一些实施例中,参见图1-图3、以及图7,光学组件102还包括第一镜头132,被配置为收集待处理光束。这种情况下,第一光束由至少部分第一镜头132收集的待处理光束形成。
121.在一些实施例中,参见图1-图3,当第一镜头132被配置为收集待处理光束时,第二分光器107被配置为对第一镜头132收集的待处理光束进行分光,以形成第一光束和第二光束。第一探测装置102根据第一光束得到第一探测信息,第二探测装置106根据第二光束得到第二探测信息。光学组件102被配置为相对于第二分光器107移动,例如,移动设备104带动光学组件102移动的情况下,第二分光器107相对静止。在一些实施例中,来自第一镜头132的待处理光束可以经分光器202的透射和汇聚透镜203的汇聚后入射到第二分光器107。或者,来自第一镜头132的待处理光束可以经分光器202的反射和汇聚透镜203的汇聚后入射到第二分光器107。
122.在一些实施例中,参见图7,光学组件还可以包括第二镜头110,被配置为收集第二光束。这种情况下,第二分光器107被配置为对返回光束进行分光,以得到第二光束。例如,第二光束可以由反射镜304反射后被第二镜头110收集。
123.在一些实施例中,参见图7,第二镜头110使第二光束的中心轴平行于光学组件102的移动方向,第二分光器107与光学组件102固定连接。这种情况下,光学组件102移动的情况下,第二镜头110和第二分光器107可以同时移动。
124.在一些实施例中,参见图6或图7,光学组件包括镜头(例如图6的镜头132或图7的镜头110),镜头被配置为收集返回光并使返回光传播至第二分光器107,或者镜头被配置为收集第二光束。第二分光器107被配置为将返回光束进行分光,以得到第二光束。测量系统还可以包括第二光阑109,被配置为阻挡第二光束中与第二光束的中心轴之间的夹角大于第二预设夹角的部分进入第二探测装置106。换言之,第二光束中与第二光束的中心轴之间的夹角小于或等于第二预设夹角的部分才能进入第二探测装置106。应理解,第二预设夹角可以根据实际情况确定。这里,第二光阑109和第二探测装置106均与镜头132或镜头110的焦平面共轭。
125.具体的,当镜头被配置为收集返回光并使返回光传播至第二分光器时,即图6所示实施例,镜头为第一镜头132;当镜头被配置为收集第二光束时,即图7所示实施例,镜头为第二镜头110。
126.例如,参见图6,第二光束被汇聚透镜301汇聚后入射到第二光阑109,透过第二光阑109的第二光束入射到汇聚透镜302,进而由汇聚透镜303汇聚后入射到第二探测装置106。
127.例如,参见图7,第二镜头110收集的第二光束经反射镜305反射后入射到汇聚透镜306,第二光束被汇聚透镜306汇聚后入射到第二光阑109,透过第二光阑109的第二光束入射到汇聚透镜307,进而由汇聚透镜307汇聚后入射到第二探测装置106。
128.第二探测装置106为成像装置或光强探测部件。成像装置包括:相机或摄像机,光强探测部件包括单个光电二极管或光电倍增光。
129.在图6、图7所示实施例中,第二探测装置106为成像装置或光强探测部件时,第二
探测信息包括第二光束的光强。
130.当第二探测装置106为成像装置时,第二探测信息包括:被测区域的探测图像。第二探测信息包括第二光束的光强、探测图像的对比度、探测图像的弥散度中的一者或多者组合。
131.第二探测信息为探测图像的弥散度时,特征时刻的弥散度小于除特征时刻之外的任意一个第一时刻的弥散度。
132.图1-图3、图6和图7所示实施例中,第一探测装置103与第二探测装置106探测的的被测区域相同,根据第一探测装置103获取的第一探测信息确定的实际距离能够表示被测区域的高度,从而能够提高检测精度。
133.图8是根据本公开还一些实施例的测量系统的结构示意图。
134.如图8所示,光源101包括第一子光源111和第二子光源121。第一子光源111被配置为产生第一原始光束。第二子光源121被配置为产生第二原始光束。换言之,光源101产生的原始光束包括第一原始光束和第二原始光束。
135.从被测物体a的被测区域返回的返回光束包括第一返回光束和第二返回光束。第一返回光束为从被测物体a的被测区域返回的第一原始光束。第二返回光束为从被测物体a的被测区域返回的第二原始光束。
136.光学组件102包括固定连接的第一光学组件1021和第二光学组件1022。第一光学组件1021被配置为根据第一返回光束形成待处理光束。这种情况下,第一光束为待处理光束。第二光学组件1022被配置为收集第二返回光束。这种情况下,第二光束为第二返回光束。
137.第一探测装置103被配置为根据第一光束得到第一探测信息。第二探测装置106被配置为根据第二光束得到第二探测信息。
138.在一些实施例中,第一光学组件1021还被配置为收集第一原始光束,并使第一原始光束到达被测物体a的被测区域。第一光学组件1021包括色散棱镜,被配置为使第一原始光束中不同波长的光汇聚至第一光学组件1021的光轴的不同位置。
139.第一光学组件1021的光轴为第一返回光束的中心轴。
140.在一些实施例中,第二光学组件1022还被配置为收集第二原始光束,并使第二原始光束到达被测区域。第二光学组件1022包括色散棱镜,被配置为使第二原始光束中不同波长的光汇聚至第二光学组件1022的光轴的不同位置。在另一些实施例中,第二光学组件1022可以包括干涉物镜,被配置为根据第二返回光束得到干涉光束,以干涉光束作为第二光束。
141.图8所示实施例中,第一探测装置103为光谱仪。
142.处理系统105被配置为根据多个第一时刻中每个第一时刻下的第一探测信息,确定在每个第一时刻下光学组件102与被测物体a的固定平面之间的实际距离,包括:对于某一第一时刻,通过第一探测装置103获取该第一时刻下第一光束中各波长的光强;根据光强最大的光强对应的波长,获取该第一时刻下的实际距离。
143.在一些实施例中,所述第一光学组件1021为干涉镜头,所述第一探测装置为光谱仪;所述第一光学组件1021为单个透镜或透镜组,所述第一探测装置为相机或摄像机。在另一实施例中,所述第一光学组件1021为整形镜头,所述整形镜头被配置为收集第一原始光,
并向待测物出射整形后的第一原始光,所述整形后的第一原始光沿所述整形镜头光轴方向不同位置处的横截面具有不同形状或尺寸中的一者或两者。具体的,整形后的第一原始光的横截面为半圆形和点,在所述点的两侧所述半圆形的弧线超向不同方向。
144.图9是根据本公开一些实施例的测量方法的流程示意图。该测量方法可以基于上述任意一个实施例的测量系统来实现。
145.在步骤902,光源产生原始光束。这里,从被测物体的被测区域返回的原始光束为返回光束。例如,原始光束可以包括白光、紫外光、红外光中的一者或多者组合。
146.在步骤904,光学组件根据返回光束得到待处理光束。这里,至少部分待处理光束为第一光束。
147.例如,光学组件可以包括干涉物镜或共聚焦物镜。
148.在步骤906,根据第一光束得到第一探测信息。
149.例如,第一探测装置根据第一光束得到第一探测信息。例如,第一探测信息包括待处理光束中预定波长的光的光强。
150.在步骤908,使光学组件与被测物体沿光学组件的光轴方向相对移动。
151.例如,通过控制移动设备带动光学组件和被测物体中的至少一个移动。
152.在步骤910,根据多个第一时刻中每个第一时刻下的第一探测信息,确定在每个第一时刻下光学组件与固定平面之间的实际距离。
153.步骤910的实现方式可以参照以上描述,在此不再赘述。
154.上述实施例中,利用多个第一时刻下的第一探测信息可以得到在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离。基于在每个第一时刻下光学组件与被测物体的固定平面之间的实际距离可以更准确地进行后续操作,例如,可以更准确地确定被测物体的被测区域的高度信息等。
155.在一些实施例中,图9所示测量方法还包括图10所示步骤912-步骤918。图10是根据本公开另一些实施例的测量方法的流程示意图。
156.在步骤912,根据第二光束得到第二探测信息,第二光束为部分返回光束或部分待处理光束,第二探测信息表征光学组件与被测区域之间的相对位置。
157.例如,根据第二光束得到第二探测信息包括:根据第二光束得到探测图像;和根据探测图像得到第二探测信息,第二探测信息包括第二光束的光强和探测图像的对比度中的至少一项。
158.在一些实施例中,第二探测信息包括第二光束的光强;在特征时刻下的第二光束的光强大于在多个第一时刻中除特征时刻外的任意一个第一时刻下第二光束的光强。
159.在步骤914,获取第二探测信息为预设探测信息时的第一时刻作为特征时刻。
160.在步骤916,获取特征时刻下的光学组件与固定平面之间的实际距离。
161.在步骤918,根据特征时刻下的光学组件与固定平面之间的实际距离,确定被测区域的高度信息。
162.在一些实施例中,测量方法还包括:根据多个被测区域相对于同一基准面的高度信息获取待测物的形貌。
163.在一些实施例中,根据多个被测区域相对于同一基准面的高度信息获取待测物的形貌包括:对于每个被测区域重复上述光源产生原始光束;根据特征时刻下的光学组件与
固定表面之间的实际距离,确定被测区域的高度信息的步骤;获取每个被测区域相对于同一基准面的高度信息;根据每个被测区域相对于同一基准面的高度信息获取待测物的形貌。
164.例如,获取每个被测区域相对于同一基准面的高度信息的步骤包括:重复步骤902至步骤918的步骤,以获取每个被测区域相对于初始基准面的高度;将每个被测区的初始基准面统一至同一基准面。
165.至此,已经详细描述了本公开的各实施例。为了避免遮蔽本公开的构思,没有描述本领域所公知的一些细节。本领域技术人员根据上面的描述,完全可以明白如何实施这里公开的技术方案。
166.本领域内的技术人员应当明白,本公开的实施例可提供为方法、系统、或计算机程序产品。因此,本公开可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本公开可采用在一个或多个其中包含有计算机可用程序代码的计算机可用非瞬时性存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
167.虽然已经通过示例对本公开的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本公开的范围。本领域的技术人员应该理解,可在不脱离本公开的范围和精神的情况下,对以上实施例进行修改或者对部分技术特征进行等同替换。本公开的范围由所附权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。