确定反射式光刻掩模在其操作环境中的图案元件的放置的装置和方法
1.本专利申请要求于2019年2月6日向德国专利和商标局提交的德国专利申请de 10 2019 201 497.6的优先权,其全部内容通过引用并入到本技术中。
1.技术领域
2.本发明涉及一种用于确定反射式光刻掩模在其操作环境中的图案元件的放置的方法和装置。
2.
背景技术:
3.由于在半导体产业中的集成密度不断增长,光刻掩模不得不在晶片上成像越来越小的结构。为了考虑该趋势,光刻设备的曝光波长移位至越来越短的波长。将可能至少部分地用极紫外(euv)范围内(优选但不一定在6nm至15nm的范围内)的波长操作未来光刻系统。euv波长范围对未来光刻系统的束路径中的光学元件的精度提出了巨大的要求。在所有可能性中,euv波长范围中的光学元件且因此还有光刻掩模将是反射式光学元件。然而,反射式光学元件也可用于其他波长。
4.在光掩模的情况下,特别是在euv掩模的情况下,重要的是光掩模的图案元件将由半导体部件的设计预定义的结构元件恰好成像到晶片上的光刻胶中。只有以这种方式,才有可能通过使用不同掩模的多个顺序处理过程和曝光过程在晶片上可重复地生产具有纳米范围尺寸的结构。根据itrs(国际技术路线图半导体),满足未来技术节点的光刻掩模的叠加要求是光刻中最困难的挑战之一。
5.由于它们的分层构造,euv波长范围的光刻掩模具有内部应变。在此,多层结构典型地对内部应变做出最大单独贡献。euv掩模的内部应变导致其表面的曲率。通常,euv掩模的内部应变导致掩模正面的凸表面,即多层结构和图案元件布置在该凸表面上。
6.德国专利申请de 10 2016 204 535 a1描述了一种用于校准测量显微镜的方法,其使用校准掩模和自校准算法来确保测量显微镜的误差校正数据,该误差校正数据用于光刻掩模的误差校正。
7.目前,借助于光学测量的制造光掩模测量常规透射式光掩模的图案元件的放置。在测量期间,透射式光掩模典型地安装在三个半球体上并且由重力效应保持在位置中。新制造的掩模的下凹(sagging)(其由它们固有重量引起)借助于有限元模拟来确定并且吸收体结构的图案元件由透射式掩模的下凹引起的放置误差通过计算校正。
8.德国专利申请de 10 2017 202 945 a1描述了一种方法,通过该方法可以确定在反射式掩模的不同安装件或安装之间的过渡时内部应变和重力对图案元件的位置的影响。
9.在可预见的未来,将越来越多地使用euv掩模。在这种情况下,euv掩模与公共掩模集合(混合匹配应用)中的常规透射式掩模一起使用。由于euv掩模特别地用于对晶片上的关键结构元件进行成像,因此它们对opo(on
‑
product
‑
overlay,产品上覆盖)预算的贡献变得越来越重要。
10.在euv步进机中,euv掩模典型地保持在静电夹持装置或静电卡盘(esc)上。为此,euv掩模的背面配备有导电层。该背面层同样会在euv掩模中产生应变。此外,euv掩模的背面具有小的不均匀。所述不均匀可能由掩模基板的背面的不完美平坦度和/或背面掩模表面的不完全平坦的导电涂层引起。在操作euv掩模期间,通过静电夹持装置将所述不均匀至少部分地转移到euv掩模的正面。
11.de 10 2004 010 002 a1描述了一种用于euv掩模的掩模保持件,其具有多个用于掩模的支撑元件,其中每个支撑元件被实施为使得其能够被单独地电偏置。
12.下面作为示例引用的文件分析了euv掩模的背面不均匀:p.vukkadala、d.patil和ri engelstad:在第26届欧洲掩模和光刻会议上spie会议集的第7545卷,第75404
‑
1~75404
‑
11页的《euvl的ip误差补偿技术的概述(overview of ip error compensation techniques for euvl)》;o.tanaka等人:在euvl研讨会,ma
‑
p07于2010年10月发表的《对掩模非平坦度使用补偿方法的euv1的覆盖准确度(overlay accuracy of euv
1 using compensation method for nonflatness of mask)》;k.ballman.c.lee、t.dunn和a.bean:在2016年5月的第xxiii届光掩模和下一代光刻掩模技术研讨会的spie会议集的第9984卷的《覆盖补偿方法的误差分析和euv光掩模平坦度的提议的功能容差(error analysis of overlay compensation methodologies and proposed functional tolerances of euv photomask flatness)》,doi:10.1117/12.2242282;以及g.brandstetter和s.govindjee:于2012年十月到十二月的微/纳米光刻、mems和noems的杂志的第11卷第4期的第043005
‑
1至043005
‑
10页的《在静电卡盘期间极紫外光刻掩模形变行为的分析处理(analytical treatment of the deformation behavior of extreme
‑
ultraviolet lithography masks during electrostatic chucking)》。
13.确定euv掩模上图案元件的放置以及可重复地确定euv掩模的正面和背面不均匀成为计量挑战。
14.本发明解决的问题是指定可以至少部分地满足所描述的挑战的装置和方法。
3.
技术实现要素:
15.根据本发明的一个示例性实施例,该问题由根据权利要求1的装置以及由根据权利要求17的方法来解决。在一个实施例中,一种用于确定反射式光刻掩模的图案元件在反射式光刻掩模的操作环境中的放置的装置包括:(a)至少一个第一构件,被配置为用于在与反射式光刻掩模的操作环境不对应的测量环境中确定反射式光刻掩模的背面的表面不均匀数据和/或反射式光刻掩模的安装件的表面不均匀数据;(b)至少一个第二构件,被配置为用于在所述测量环境中确定图案元件的放置数据;以及(c)至少一个计算单元,被配置为根据所确定的背面和/或安装件的表面不均匀数据及所确定的放置数据计算反射式光刻掩模的图案元件在所述操作环境中的放置。
16.根据本发明的装置可以确定反射式光刻掩模的背面不均匀。通常,根据本发明的装置可以考虑在从测量环境过渡到操作环境时euv掩模和/或euv掩模的保持件的不均匀对图案元件在反射式光刻掩模的操作环境中的位置的影响,该保持件用于在测量环境中保持或固定euv掩模。因此,可以以更高精度来确定反射式光刻掩模对opo(产品上覆盖)预算的贡献。由于反射式光掩模主要用于关键过程步骤,因为它们的图案元件在掩模堆叠体中的
结构尺寸,基于反射式光掩模的图案元件放置已以更高准确度来确定,可以优化两个或更多个反射式光掩模和/或一个或多个反射式光掩模与一个或多个透射式光掩模的覆盖。因此,由此可以提高例如基于混合匹配掩模集合的半导体部件制造过程的良率。
17.反射式光刻掩模的背面与反射式光刻掩模的具有图案元件的正面相对。
18.根据本发明的装置还可以用于确定所有种类的常规透射式光掩模的图案元件的放置。
19.至少一个第二构件还可以附加地被配置为确定反射式光刻掩模的正面的表面不均匀数据,并且计算单元还可以被配置为对于计算图案元件的放置而考虑所确定的正面的表面不均匀数据。
20.至少一个第一构件和/或至少一个第二构件可以被配置为从一个或多个外置测量装置获得反射式光刻掩模的背面、正面和/或安装件的的表面不均匀数据以及图案元件的放置。至少一个第一构件和/或至少一个第二构件可以从存储器获取反射式光刻掩模的背面、正面和/或安装件的表面不均匀数据以及图案元件的放置。
21.在第一示例性实施例中,本技术中定义的装置可以包括接口,经由该接口该装置可以从一个或多个外置测量装置获得测量数据,例如反射式光刻掩模的背面和/或正面的表面不均匀数据和/或反射式光刻掩模的安装件的表面不均匀数据。接口可以包括有线或无线接口。此外,该装置可以从其他外置测量装置获得描述图案元件的放置的测量数据。
22.反射式光刻掩模的安装件可以包括卡盘。卡盘可以包括真空卡盘(vc)或静电卡盘(esc)。安装件可以具有用于保持反射式光刻掩模的表面。用于保持或固定反射式光刻掩模的表面可以包括平坦表面。用于保持反射式光刻掩模的表面可能具有不均匀性。安装件的表面的不均匀可以包括局部不均匀。局部不均匀可以相对于安装件的平均表面偏差的范围为0.1nm到20nm。
23.在测量环境中,可以以两种不同的方式保持或固定euv掩模。首先,euv掩模可以安装在三点安装件上,其次,euv掩模可以在测量环境中借助于卡盘来固定。
24.至少一个第一构件可以包括第一测量单元,该第一测量单元被配置用于在与操作环境不对应的环境中确定表面不均匀数据。
25.在其操作环境中,反射式光掩模典型地通过静电卡盘固定在其位置上。在该布置中,直接地确定反射式光刻掩模的背面不均匀是不可能的。
26.至少一个第一构件可以包括至少一个第三测量单元,该第三测量单元被配置用于确定安装件的表面不均匀数据。至少一个第三测量单元可以包括轮廓仪。轮廓仪可以使用触觉或光学方法。轮廓仪可以使用以下组中的至少一种技术:共焦技术、激光轮廓测量法和白光干涉测量法。用于确定安装件的表面不均匀数据的至少一个第三测量单元可以包括干涉仪。
27.至少一个第二构件可以包括第二测量单元,该第二测量单元被配置用于在与操作环境不对应的环境中确定图案元件的放置数据。
28.如上所解释的,在其操作环境中的反射式掩模由静电卡盘保持在其位置中作为标准。相比之下,在部分掩模制造过程中,反射式掩模通常通过重力作用固定在三点安装件中。
29.第二测量装置可以被配置为用于确定反射式光刻掩模的图案元件的坐标。
30.第二测量单元可以被配置为用于在至少部分地与操作环境对应的环境中确定图案元件的放置数据。
31.第二测量单元的卡盘可以以与反射式掩模在其操作环境中的固定实质对应的方式固定反射式光刻掩模。此外,第二测量单元可以被配置为模拟反射式光刻掩模的操作环境的一个或多个其他参数。操作环境的其他参数可以是:操作环境的温度、气压和/或空气湿度。如果操作环境对应于真空环境,则气压和空气湿度与真空环境中的剩余残留压力和剩余残留湿度有关。
32.在此和本说明书的其他地方,如果使用根据现有技术的测量器具来确定测量变量,则表述“实质”表示测量变量在常规测量误差内的指示。
33.用于确定反射式光刻掩模的图案元件的放置的装置的至少一个第二构件可以被配置用于确定反射式光刻掩模的正面的表面不均匀数据。至少一个第二构件可以包括第四测量单元,其被配置为用于在与操作环境不对应的环境中确定反射式光刻掩模的正面的表面不均匀数据。第四测量单元可以被配置为用于在与操作环境对应的环境中确定正面的表面不均匀数据。第一测量单元可以包括第四测量单元。此外,第二测量单元可以包括第四测量单元。
34.计算单元可以被配置为变换所获得的背面、正面和/或安装件的表面不均匀数据和所获得的放置数据,以便确定表面不均匀数据并且确定放置数据。
35.如果背面和/或正面的表面不均匀数据和放置数据由不同的单元或不同的测量单元来确定,则需要将两个计量工具的测量数据精确地相互转换。
36.计算单元可以被配置为确定图案元件在操作环境中相对于反射式光刻掩模的安装件的放置。
37.计算单元可以被配置为确定图案元件的放置相对于操作环境中的设计数据的至少一个偏差。
38.计算单元还可以被配置为根据图案元件的放置的至少一个偏差和/或根据所确定的表面不均匀数据确定像素的至少一个布置,该像素的至少一个布置校正至少一个偏差和/或背面表面不均匀。
39.因此,上述装置的一个实施例可以用于通过一个或多个图案元件的目标横向位移来校正反射式光刻掩模的图案元件的放置相对于由设计预定义的放置的确定的偏差。由于在该环境中使用掩模,因此将校正与掩模的操作环境相关联是有利的。替代地或附加地,可以通过将一个或多个像素的布置引入或写入到掩模基板来补偿确定的背面表面不均匀。
40.计算单元可以被配置为确定图案元件在操作环境中相对于反射式光刻掩模的安装件的表面的放置。操作环境中的反射式光刻掩模的安装件可以包括静电卡盘。
41.计算单元可以被配置为确定反射式光刻掩模的图案元件在操作环境中相对于静电卡盘的放置,该静电卡盘的表面设定为理想上平坦的。
42.在将掩模固定在静电卡盘或真空卡盘上的情况下,假设卡盘可以在反射式掩模上施加力,该力的幅度使得所述掩模的背面实质上覆盖卡盘的表面上的整个区域。这意味着在反射式掩模固定在卡盘中的情况下,掩模的背面表面不均匀被卡盘的表面不均匀隐藏或消除。
43.如上所述,反射式掩模可以例如通过三点安装件或通过卡盘保持在测量环境中。
保持或固定反射式光刻掩模的卡盘的表面不是完全平坦的。卡盘的表面的不均匀至少以衰减形式传播通过掩模,并且导致在euv掩模的正面上安装的图案元件的放置发生更改。
44.同样如上面已经解释的,反射式光刻掩模典型地在它们的操作期间(即在它们的操作环境中,即在光刻装置的曝光系统中)由静电卡盘保持。操作环境中反射式光刻掩模的固定通常与设定为理想平坦的esc表面有关。如果借助于vc或esc将反射式掩模固定在测量环境中,则上述指定的装置将确定的放置数据在操作环境中变换到esc的那个表面,该表面被设定为理想平面。这意味着测量环境中卡盘的现有表面不均匀相对于操作环境中使用的esc表面在计算上被校正,该esc表面被设定为理想平坦的。
45.确定背面、正面和/或安装件的表面不均匀数据和放置数据可以包括从外置装置获得这些数据和/或可以包括通过装置的一个或多个测量单元确定背面、正面和/或安装件的表面不均匀数据以及放置数据。
46.用于确定图案元件的放置的装置还可以包括:掩模旋转单元,被配置为定位反射式光刻掩模使得其正面和背面互换。
47.在旋转或翻转反射式光掩模时,应考虑到所述光掩模只允许保持在特定区域中,以避免污染反射式掩模或在其有效区域产生缺陷。
48.第一测量单元和/或第四测量单元可以包括被配置为确定反射式光刻掩模的表面不均匀数据的聚焦系统。
49.将光束聚焦到反射式光掩模的背面和/或正面,以便分别确定背面和/或正面的不均匀,使得能够以高横向分辨率确定不均匀,因为不会发生在反射式掩模的背面和/或正面的相对较大的区域上对光束进行平均。当确定掩模的背面和/或掩模的正面的不均匀时的准确度可以通过选择扫描点的横向间距来设置。
50.第二测量单元可以包括配置为确定图案元件的放置数据的聚焦系统。
51.第二测量单元可以被配置为自动确定反射式光掩模的背面和/或正面的表面不均匀数据及其放置数据。
52.反射式光刻掩模可以具有背面的导电涂层。
53.第一测量单元、第二测量单元和/或第四测量单元的聚焦系统可以包括自动聚焦系统,用于自动确定背面的、正面的不均匀数据和/或图案元件的放置数据。在替代实施例中,第一测量单元、第二测量单元和/或第四测量单元可以通过聚焦堆叠测量来确定背面的、正面的不均匀数据和/或图案元件的放置数据。
54.导电涂层用于将反射式掩模在其操作环境中通过静电卡盘安装或固定。导电涂层典型地包括金属或金属合金。反射式掩模的背面的导电涂层典型地充当用于来自电磁光谱的可见光或紫外波长范围的光的反射镜。
55.反射式光刻掩模可以包括用于极紫外(euv)波长范围的光刻掩模。目前,在euv范围内优选使用10nm至15nm的波长范围。
56.反射式光刻掩模的正面可以包括用于确定图案元件的放置数据的标记或对准标记。对准标记可以安装在反射式掩模上的规则或不规则网格中。对准标记可以单独使用或与图案元件结合地使用来确定图案元件的放置数据。然而,还可以排他地使用图案元件本身来确定其在反射式光刻掩模上的位置。
57.第一测量单元可以包括用于可见波长范围的第一光源和/或用于深紫外波长范围
的第二光源。
58.第二测量单元可以包括用于可见波长范围的第三光源和/或用于深紫外波长范围的第四光源。
59.第一光源、第二光源、第三光源和/或第四光源可以包括激光器系统或灯,例如led(发光二极管)。第一光源和第三光源可以包括氦氖激光器。第二光源和第四光源可以包括氟化氩激光器。第一光源、第二光源、第三光源和/或第四光源可以包括在0.1到0.98、优选地0.1到0.95、更优选地0.1到0.92并且最优选地0.1到0.9的范围内的数值孔径(na)。目前,优选使用具有0.1至0.4范围内的na的可见波长光谱中的光源,或深紫外(duv)波长范围内的光源,例如激光器系统,其以193nm发射并且具有在0.4到0.9的范围内的na。
60.第一光源和/或第三光源可以包括在10nm到15nm范围内的波长并且具有<1nm的线宽。第一光源和第三光源或者第二光源和第四光源可以实施为一个光源。
61.有利的是,使用具有最短可能波长的光子来确定反射式掩模的图案元件的放置和确定反射式掩模的背面和/或正面的表面不均匀,因为装置或测量装置的分辨能力随着所用光源的波长的减小而增加。目前,缺少可用的euv光源仍然在很大程度上防止使用在反射式掩模的光化波长处操作的测量装置。
62.第一测量单元可以包括至少一个第一检测器,并且第二测量单元可以包括至少一个第二检测器。至少一个第一检测器和至少一个第二检测器可以包括ccd(电荷耦合器件)检测器。
63.第一测量单元可以确定背面的表面不均匀数据,第二测量单元可以确定图案元件的放置数据,而不更改反射式光刻掩模的位置。此外,第一测量单元可以确定背面的表面不均匀数据,第二测量单元可以确定图案元件的放置数据,并且在其充当第四测量单元时,可以确定正面的表面不均匀数据,而不更改反射式光刻掩模的定位或位置。
64.上面定义的装置的这些实施例的优点在于,测量数据可以以简单的方式相互有关。此外,这些实施例是有利的,因为可以在反射式光刻掩模的相同安装状态下实行所有测量并且因此不会发生一些潜在的误差源。
65.计算单元可以被配置为考虑由于反射式光刻掩模在测量环境中保持而引起的反射式光刻掩模的形变。在测量环境中,反射式光刻掩模可以例如保持在三点安装件中或通过卡盘保持。背面和/或正面的表面不均匀数据和/或反射式光刻掩模的放置数据可以在测量环境中确定。
66.在掩模的三点安装的情况下,无论考虑中的掩模类型如何,都会由于其固有重量而发生光掩模的下凹;这种现象在本领域中称为“掩模下凹(mask sagging)”。对于透射式光掩模,装置的计算单元可以对掩模基板实行有限元模拟,以便确定在三点安装情况下掩模的下凹。对于反射式掩模,第二测量单元可以确定掩模的高度轮廓。第二测量单元可以确定反射式掩模的正面和/或背面的高度轮廓。此外,第二测量单元在其充当第四测量单元时可以确定反射式光刻掩模的正面表面的不均匀。第一测量单元同样可以被配置为确定反射式掩模的背面的高度轮廓。
67.在反射式光刻掩模通过vc或esc固定的情况下,可以在测量环境中使用第一测量单元或第二测量单元来确定图案元件的放置。
68.优选地,第二测量单元不仅测量反射式掩模的图案元件的坐标,即xy坐标,而且测
量其高度信息,即z坐标。所确定的三维测量数据集合然后可以由计算单元用于计算图案元件的放置。
69.第二测量单元可以与确定图案元件的坐标的过程同时地实行确定反射式掩模的高度轮廓或表面轮廓的过程。然而,第二测量单元还可以通过分开的测量来实行确定高度轮廓的过程。可以在装置中的反射式光刻掩模的温度调节的时间段期间实行高度轮廓的确定以及可选地实行反射式光掩模的正面表面的不均匀的确定。
70.此外,第二测量单元可以在确定放置数据的过程期间自动伴随地测量反射式掩模的高度轮廓。如果放置测量包括的测量点不足以预定准确度确定高度轮廓,则可以在分开的测量中例如通过由第二测量单元实行的聚焦测量来确定反射式掩模的表面轮廓。由于可以例如在第二测量单元或装置中的euv掩模的温度调节阶段期间实行高度轮廓的分开确定,因此确定表面轮廓典型地不会导致用于装置中的反射式掩模的测量时间的延长。
71.第二测量单元可以被配置为实质上垂直地辐照反射式光刻掩模的正面,并且第一测量单元可以被配置为实质上垂直地辐照反射式光刻掩模的背面。
72.上面定义的装置的这个实施例使得可以确定图案元件的放置并且确定反射式掩模的背面不均匀,而不更改掩模的定位或位置。这有利于两个数据集合的转换或将其变换到公共平面或公共坐标系。
73.该装置可以包括用于保持反射式光刻掩模的三点安装件。此外,该装置可以包括用于在测量环境中保持反射式光刻掩模的静电卡盘。
74.至少一个第一构件还可以被配置为接收测量环境中的反射式光刻掩模的安装件的表面不均匀数据。
75.计算单元还可以被配置为当计算图案元件在操作环境中的放置时考虑测量环境中反射式光刻掩模的安装件的不均匀数据。
76.计算单元可以获得在测量环境中保持或固定反射式掩模的esc或vc的不均匀数据,以便将获得的这些数据组合以达到计算图案元件在反射式掩模的测量环境中的放置的目的。
77.计算单元可以被配置为在确定放置数据的过程期间和/或在确定背面和/或正面的表面不均匀数据的过程期间考虑对反射式光刻掩模的重力影响。
78.计算单元可以被配置为通过实行有限元模拟来确定对反射式光刻掩模的重力影响。
79.除了内部应力外,重力效应也导致反射式光刻掩模在上面定义的装置中的其三点安装的情况下的形变。因为对反射式掩模的形变和整体形变的两种单独贡献位于反射式掩模的线性形变范围内,单独贡献可以相互独立地来确定并且在它们的效应方面相互独立地进行考虑。
80.出于计算图案元件的放置的目的,计算单元可以被配置为在从不与反射式光刻掩模的操作环境对应的测量环境转变成操作环境时确定反射式光刻掩模的中性轴线的位置的变化。在与反射式光刻掩模的操作环境不对应的测量环境中,可以通过三点安装件固定反射式光刻掩模。
81.中性轴线表示例如束或板的主体中压缩应力转变为拉伸应力的平面。中性轴线不受力。可以在掩模的每个点处通过x方向和y方向上的斜率或局部切线来描述光掩模的中性
平面。
82.可以基于三维放置数据确定中性轴线的位置的变化。
83.首先,反射式掩模的内部应力的变化导致图案元件在反射式掩模的表面上的位置的变化。其次,反射式掩模的应力状态的变化体现为高度轮廓的变化,因此还体现为反射式掩模的中性轴线的位置的变化。因此,根据表面轮廓的变化,可以推断出中性轴线位置的变化,这可以用于计算图案元件在操作环境中的放置。
84.在三点安装件的情况下确定中性轴线的位置的变化可以包括确定测量环境或装置中反射式掩模的放大率相对于操作环境的变化。确定放大率的变化可以包括确定各向同性放大倍率和/或可以包括确定至少两个放大倍率,其覆盖装置中反射式掩模的各向异性放大率。可以由装置的计算单元来确定中性轴线的位置的变化。
85.计算单元可以附加地被配置为当计算图案元件的放置时考虑获得和确定的背面和/或正面的表面不均匀数据。此外,计算单元可以被配置为当计算图案元件的放置时考虑获得和确定的放置数据。
86.确定中性轴线的位置的变化可以包括:从包括不同类型的反射式光刻掩模的中性轴线的位置的数据库中读取中性轴线的位置的变化。
87.用于确定反射式光刻掩模的图案元件的放置的装置可以包括非易失性存储器。不同类型反射式掩模的模型可以存储在非易失性存储器中,所述模型描述了三点安装件中反射式掩模的背面的不均匀如何影响反射式掩模在其操作环境中的图案元件的放置。计算单元可以使用存储的模型来计算反射式掩模的图案元件的放置。
88.用于确定反射式光刻掩模的图案元件的放置的装置还可以包括用于确定装置中存在的介质的折射率的单元。所述单元可以包括例如由构成的标准具。为了提高折射率确定的精度,可以在计算上考虑由于材料老化和/或由于压力相关的压缩而引起的标准具的长度的变化。材料老化最大为0.15ppm/a(每年百万分之一),应尽可能总是考虑在内。介质可以包括空气。用于确定折射率的单元至少可以包括至少一个干涉仪。
89.此外,该装置可以包括激光器系统,该激光器系统被配置为将像素的至少一个布置引入到反射式光刻掩模的基板中。激光器系统可以被配置为生成具有从皮秒范围到飞秒范围的持续时间的光脉冲。此外,激光器系统可以包括聚焦单元,该聚焦单元被配置为在掩模基板中的预定义深度处布置光束的焦点。此外,激光器系统可以包括扫描单元,该扫描单元被配置为将激光器系统的光脉冲引导到反射式光刻掩模的基板的预定义位置上,以便生成像素的至少一个布置。
90.在一个实施例中,一种用于确定反射式光刻掩模在其操作环境中的图案元件的放置的方法包括以下步骤:(a)在与操作环境不对应的测量环境中确定反射式光刻掩模的背面的表面不均匀数据和/或反射式光刻掩模的安装件的表面不均匀数据;(b)在测量环境中确定图案元件的放置数据;以及(c)根据所确定的背面和/或安装件的表面不均匀数据及所确定的放置数据计算图案元件在所述操作环境中的放置。
91.确定表面不均匀数据可以包括通过第一测量单元确定表面不均匀数据,确定放置数据可以包括通过第二测量单元确定图案元件的放置数据,以及表面不均匀数据和放置数据可以在共同测量过程中确定。
92.确定表面不均匀数据可以包括确定反射式光刻掩模的背面和/或正面的表面不均
匀数据。
93.确定表面不均匀数据可以在反射式光刻掩模的温度调节阶段实行。反射式光刻掩模的温度调节阶段可以在上面定义的装置中实现。反射式光刻掩模的温度调节阶段可以在上面定义的装置的第一测量单元和/或第二测量单元中实现。
94.可以实行确定表面不均匀数据和确定放置数据,而不发生反射式光刻掩模的位置的变化。
95.用于确定反射式光刻掩模的图案元件的放置的方法还可以包括以下步骤:确定反射式光刻掩模的正面的表面不均匀数据。
96.此外,确定反射式光刻掩模的图案元件的放置的方法可以包括以下步骤:将像素的至少一个布置引入到反射式光刻掩模的基板中,该像素的至少一个布置校正在操作环境中的背面表面不均匀的和/或图案元件的放置的至少一个偏差。
97.一种计算机程序可以含有指令,该指令当由计算机系统执行时使得计算机系统实行如上所描述的方面中任一项所述的方法。
4.附图说明
98.参考附图,以下详细的说明书描述了本发明的目前优选的示例性实施例,附图中:
99.图1在上部分图像中示意性示出了穿过根据现有技术的常规透射式光刻掩模的截面图,所述掩模安装在三个半球体上,并且在下部分图像中呈现了上部分图像的光刻掩模,该光刻掩模由于重力效应的下凹已经得到校正;
100.图2呈现了三点安装件中透射式光刻掩模的下凹或表面形变;
101.图3示意性图示了穿过用于极紫外(euv)波长范围的理想反射式光刻掩模的横截面图;
102.图4在上部分图像中示意性呈现了通过三点安装件固定的实际反射式掩模的截面图,并且在下部分图像中示出了在静电卡盘上安装的来自上部分图像的反射式掩模;
103.图5根据现有技术示意性阐明了图4的上部分图像中弯曲的euv掩模的平面外畸变(opd);
104.图6根据现有技术示意性限定了图4的上部分图像中弯曲的euv掩模的平面内畸变(ipd);
105.图7根据现有技术再现来自图4的上部分图像的euv掩模,其中附加地指示表征掩模的曲率的一些变量;
106.图8根据现有技术再现来自图7的euv掩模,所述掩模由静电卡盘保持;
107.图9在上部分图像中示意性地示出了穿过由其表面具有不均匀性的卡盘保持的反射式光掩模的截面,并且在下部分图像中再现了静电卡盘的固定,该静电卡盘的表面被设定为理想平坦的;
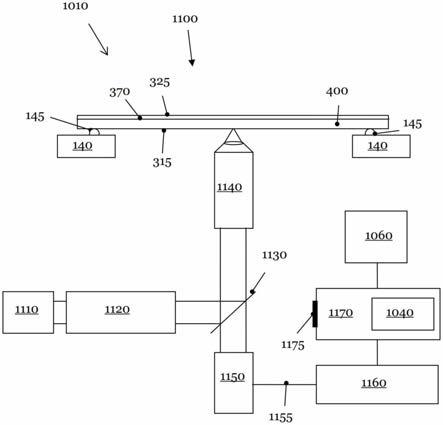
108.图10示出了穿过用于确定光刻掩模的图案元件的放置的装置的一些部件的示意性截面图;
109.图11再现了穿过用于测量光刻掩模,特别是euv掩模的背面不均匀的第一测量单元的示意截面图;
110.图12图示了穿过用于测量光刻掩模,特别是euv掩模的图案元件的放置的第二测
量单元的示意截面图;
111.图13示出了第二测量单元的第二示例性实施例,该第二测量单元可以测量图案元件的放置和掩模的背面的不均匀。
112.图14示出了将来自图11的第一测量单元和来自图12的第二测量单元进行组合的组合装置;
113.图15呈现了在测量环境中穿过用于测量反射式光刻掩模的安装件的表面的不均匀的第三测量单元的示意性截面图;以及
114.图16示出了用于确定光刻掩模,特别是euv掩模在其操作环境中的图案元件的放置的方法的流程图。
5.具体实施方式
115.下面基于极紫外(euv)波长范围的反射式光刻掩模给出关于根据本发明的装置和根据本发明的方法的当前优选实施例的解释,所述反射式光刻掩模的图案元件包括吸收材料。然而,根据本发明的用于确定反射式光刻掩模的图案元件的放置的装置不受限于下面讨论的示例。当然,所述装置可以以相同的方式用于确定不同类型的euv掩模的图案元件的放置,特别地例如用于确定相移euv掩模的图案元件的放置。此外,反射式光掩模不限于euv波长范围。此外,根据本发明的装置通常可以用于确定在反射式光掩模的操作环境中的图案元件的放置,其中放置是在与操作环境不对应的环境中确定的。最后,根据本发明的装置和根据本发明的方法适用于确定所有类型的常规透射式光掩模的放置。
116.在上部分图像105中,图1示出了穿过根据现有技术的常规透射式光掩模100的示意性截面图。光掩模100包括例如由石英构成的透射基板105和在掩模100的正面110上布置的吸收性图案元件115和120。典型地,透射式光掩模100的基板105的厚度为6.35mm。常规的光掩模100的横向尺寸(即在掩模平面中的尺寸)经常为152mm x 152mm。优选地,目前142mm x 142mm的最大面积用于将图案115、120成像到晶片(光掩模100的有效区域)上。图案元件115和120布置在该区域内。
117.在制造图案元件115、120期间和在对制造的图案元件115、120的位置进行测量期间,透射式光掩模100经常以点状的方式安装在三个球体或半球体上。图1的上部分图像105再现了穿过三个半球体或静置球体145中的两个的截面图。三个半球体或静置球体145是三点安装件140中的固定光掩模100的部件。一般而言,三点式安装件140在其制造及所制造的光掩模100的测量期间首先使用,并且因此对应于测量环境150。其次,透射式掩模100在扫描仪中的操作期间由三点安装或三点安装件140固定,也就是说三点安装件140同样用在透射式掩模100的操作环境中。虚线箭头155和160图示光化辐射在光掩模100上的入射。入射到吸收性图案元件115、120上的辐射155被吸收。入射到掩模100的基板105上的辐射160穿透基板105或掩模100并且实质上没有衰减地离开其背面125。
118.如掩模100的背面125附近的虚线130所指示,在制造掩模100期间,在图案元件115、120的测量期间以及在掩模100的操作期间,光掩模100由于重力的影响因它的质量而弯曲。三点安装件中掩模的下凹在本领域中被称为“掩模下凹”。与不具有基板105的弯曲或曲率的掩模100相比较,光掩模100的弯曲略微改变图案元件115、120的位置。图1的下部分图像195呈现了来自上部分图像105的光掩模100,其中基板105是平坦的。与图1的上部分图
像105中所示的光掩模100相比,来自下部分图像195的光掩模100的图案元件115、120具有小的横向位移。
119.图1中的垂直箭头170表示光掩模100的基板105的有限元模拟180。实行光掩模100的基板105的有限元模拟180,以确定重力对在图1的上部分图像中所示的光掩模100的三点安装件140中的光掩模100的基板105的效应。同时,有限元模拟180用于基于上部分图像105中测量的图案元件115、120确定图案元件115、120在掩模的平坦正面110上的位置。作为校正掩模100的下凹的结果,图案元件115、120的放置与掩模100的平坦基板105有关。
120.当实行有限元模拟180时,常规掩模100可以被替换为其基板105,以达到良好近似。
121.图2中的图表200再现了三点安装件140中的透射式掩模的测量的下凹和表面形变。相对于三个承载点,透射式掩模的下凹在近似1μm的区域内。在图12的上下文中解释的第二测量单元可以用于测量掩模的高度轮廓或表面轮廓。
122.图3示意性呈现了穿过euv波长范围的理想吸收式反射式掩模300的截面图。euv波长范围的反射式掩模下文还称为euv掩模或euv光掩模。理想的euv掩模300设计为曝光波长在13.5nm的范围中。例如,euv掩模300的基板310由低热膨胀系数的材料制成,诸如石英。例如,其他电介质、玻璃材料或半导体材料同样可以用作euv掩模300的基板310,诸如或euv掩模300的基板310的背面312或背面表面315用于在制造euv掩模300期间和在光刻设备的步进机中操作euv掩模300期间保持基板310。优选地,在静电卡盘(esc)上保持基板310的薄电学导电层320被施加到基板310的背面312。图3中未示出卡盘。
123.多层膜或多层结构370包括20到80对交替的钼(mo)330和硅(si)335,其在下文还被称为mosi层,将多层膜或多层结构370沉积到基板310的前面322上。为了保护多层结构370,例如由二氧化硅制成的帽盖层340被施加到最上层的硅层335。诸如钌(ru)的其他材料例如同样可以用于形成帽盖层340。代替钼,还可以使用由具有大质量数的其他元素(诸如钴(co)、镍(ni)、钨(w)、铼(re)、锌(zn)或铱(ir))构成的层,来用于mosi层。例如,多层结构370的沉积可以由离子束沉积(ibd)来实行。
124.基板310、多层结构370和帽盖层340下面还称为掩模坯(blank)375。然而,具有euv掩模300的全部层的结构在没有结构化完整区域吸收体层360的情况下还可以称为掩模坯375。
125.为了从掩模坯375产生euv掩模300,缓冲层345被沉积在帽盖层340上。可能的缓冲层材料是石英(sio2)、氮氧化硅(sion)、ru、铬(cr)和/或氮化铬(crn)。在缓冲层345上沉积吸收层350。适用于吸收层350的材料尤其是cr、氮化钛(tin)和/或氮化钽(tan)。例如由氮氧化钽(taon)制成的抗反射层355可以被施加在吸收层350上。
126.吸收层350例如借助于电子束或激光束被结构化,使得吸收式图案元件350的结构从完整区域吸收层360产生。缓冲层345用于当结构化吸收体层360时(即当产生图案元件350时)保护多层结构370。
127.euv光子380入射到euv掩模300上。在图案元件350的区域中吸收入射euv光子380,并且在没有吸收式图案元件350的区域中至少大部分的euv光子380被多层结构370反射。
128.多层结构370应该被设计为使得例如钼层330和硅层335的层厚度对应于euv光子
380的光化波长的光学厚度λ/2,该euv光子380以预先确定的入射角入射到多层结构370上。偏离该条件导致对布拉格反射条件的局部违背,并且因此导致euv波长范围中局部反射光的变化。由于波长非常小,euv范围对于以下提出极高的要求:多层结构370的单独层的均匀性和图案元件350在多层结构370上的放置。
129.图3图示了理想euv掩模300。图4的上部分图像405中的euv掩模400示意性示出了穿过实际euv掩模400的截面图。euv掩模400安装在三点安装件140的两个半球体145上。三点安装件140是euv掩模400的测量环境150的一部分,其中euv掩模400至少部分地被生产和测量并且测量环境150不对应于所述掩模的操作环境。除了三点安装件140以外,测量环境150具有限定的周围条件,例如预定义温度、预定义气压和预定义空气湿度。
130.不同于图3的理想euv掩模300,在图4的测量环境150中的实际euv掩模400具有全局曲率410。全局掩模曲率410、弯曲或挠曲在本领域中被称为“掩模弓(mask bow)”。在本领域中,高度轮廓的最大高度差由pv指示,代表峰对谷。基板正面325(其上施加多层结构370和图案元件350)的全局曲率或弯曲410具有图4所示的示例的凸的形状。内部应力出现在euv掩模400中,特别是在其基板310中,因为多层结构370以近似200℃的温度在基板310上的沉积。多层结构370和基板310的材料的不同的膨胀系数导致在这材料组合的冷却过程期间在基板310和多层结构370的组合中构建内部应力。在三点安装件140中,存在由euv掩模的内部应力引起的曲率和三点安装件140中由掩模的固有重量引起的形变的组合。在图4的上部分图像405所示的示例中,重力抵消了由内部应力产生的曲率。
131.沉积吸收体层360,结构化图案元件350以及在euv掩模400的单独曝光场的边界处产生黑色边框同样在euv光掩模400中有助于在制造掩模过程期间内部应力及其中的变化。另外,薄的、完整区域导电背面层320对光刻掩模400的内部应力做出贡献。为了清楚起见,图3中的导电背面层320在图4中已经被省略。典型地,对euv掩模400的内部应力的最大贡献来自于多层结构370的多个mosi层330、335。吸收式euv掩模400的内部应力典型地位于100mpa到5gpa的范围中,特别是从300mpa到500mpa的范围中。
132.除了euv掩模400的全局曲率410,euv掩模400的背面315具有相对于平均曲率410的不均匀420。在图4中为了说明的原因大幅夸大了euv掩模400的背面表面315的不均匀420。euv掩模400的不均匀420可以源自euv掩模400的基板310的背面312,该背面312没有被抛光成完美平面的。基板310的不均匀420可以通过薄的背面导电层320平滑或放大。背面表面315与平均背面表面的局部偏差可以在两位数纳米范围内。
133.在图4的上部分图像405中的测量环境150中测量euv掩模400的图案元件350的放置,即定位。在图4的上部分图像405中所图示的示例性测量环境150中,重力或地心引力抵消euv掩模400由于弯曲的euv掩模400的三点安装件140而发生的曲率410。在测量环境150中确定的测量数据(例如图案元件350的放置数据和/或测量环境150的上述周围条件)然后旨在被变换到euv掩模300的操作环境450中。
134.图4的下部分图像495图示了来自上部分图像405的euv掩模400在其操作环境450中。在操作环境450中,euv掩模400通过静电卡盘430固定。箭头490图示了从euv掩模400的测量环境150到其操作环境450的转变。下面假设静电卡盘430的表面460实质上是平坦的。下面进一步假设,esc 430在euv掩模400上施加足以使所述掩模的背面315形变的力,使得所述背面实质上在整个区域上承载在esc 430的表面460上。在这些先决条件下,esc 430实
质上消除了euv掩模400的全局曲率410。此外,esc 430的静电吸引力实质上补偿了euv掩模400的背面315的不均匀420。
135.然而,在esc 430的力影响下,euv掩模400的背面不均匀420至少部分地通过掩模400传播并且呈现为euv掩模400的正面325上的不均匀470。然而,euv掩模400的正面325的局部不均匀470导致euv掩模400的图案元件350的位置的局部变化。那么,本技术解决的问题是,当确定euv掩模400在其操作环境450中的图案元件350的放置时,考虑图案元件450的位置的变化,所述变化是由euv掩模400的背面315的局部不均匀420引起的。
136.下面将参照图5至图8讨论与在测量环境150(其中euv掩模400固定在三点安装件140中)中制造和测量euv掩模400的上述问题区域有关的一些背景问题,以及在操作环境450(其中所述掩模被静电卡住,即由静电卡盘430保持)中的euv掩模400的操作。
137.图5示意性阐明了弯曲的掩模表面325的第一效应,这导致反射的euv辐射550的光束偏移。光束偏移550是由光化辐射在euv掩模400的正面325上的非垂直入射与弯曲的euv掩模400的高度变化结合而引起的。光束偏移导致测量的图案元件350位移到与非弯曲euv掩模400的图案元件350的位置不同的位置,这在图4的下部分图像495中示出。在x方向上(即在掩模平面的一个方向上)的光束偏移550,由于euv掩模400的全局曲率410而在本领域中称为平面外畸变(opd)。opd由以下公式确定:
138.opd
x
=δz
·
tanφ
·
m
ꢀꢀꢀ
(1)
139.典型地,euv扫描仪中的euv光510以相对于掩模400的法线成5
°
到9
°
的角度入射在euv掩模400的表面325上。在图5中图示的示例中,选择角度φ=6
°
。图5中的euv掩模由于其全局曲率410在euv掩模的区域之上具有高度变化δz。用于euv波长范围的扫描仪的投射光学单元具有的放大率的范围通常从1/4到1/8。在图5的示例中,扫描仪的投射光学单元将euv掩模的图案元件350缩小了4倍。
140.参考图6示意性阐明了局部弯曲的掩模表面325对图案元件350的测量的放置的第二效应。图6的上部分图像605示意性呈现了来自图5的弯曲euv掩模。通过正切δz/δx描述euv掩模的表面的局部曲率。正切同样可以根据公式tanα=δz/δx由角度α来表示。
141.弯曲的euv掩模中的虚线610图示了图6的部分图像605和695二者中的euv掩模的中性轴线610。中性轴线610描述了物体中的一区域,在物体经受载荷的情况下,压缩应力沿该区域转变为拉伸应力。在图6中的euv掩模中,虚线610上方的部分处于拉伸应力下,而虚线下方的部分则经受压缩应力。euv掩模在中性轴线610的二维平面中不具有内部应变。
142.图6的下部分图像695示出了图6的上部分图像605的弯曲的euv掩模的放大图。参考该部分图像695阐明中性轴线610的位置变化和图案元件350在表面325上的位移(由euv掩模400的曲率引起)之间的关系。穿过euv掩模的虚线切割线620垂直地切割中性轴线610,并且因此实质上还以直角切割正面表面325和背面表面315。中性轴线610的相交点630到euv掩模的正面表面325的垂线具有长度k
·
t。在此,t描述euv掩模的厚度。euv掩模的基板的典型厚度——如上所解释的——为6.35mm。参数k限定了中性轴线610的位置为掩模厚度t的部分。对于没有内部应变的euv掩模,例如图3中的理想euv掩模300,k值为0.5。对于应变的euv掩模400,根据图6的下部分图像中指定的定义的参数k典型地位于1/2<k<2/3的区间。
143.图案元件350在euv掩模400的正面表面325上的位移或者x方向上的ipd(平面内畸变)由在切割线620的相交点660和相交点630与表面325的垂线k
×
t的相交点670之间的距
离650来确定。由于euv掩模400的局部曲率,距离650因此确定图案元件350的位移。这对于相对于晶片的ipd
x
产生以下:
[0144][0145]
其中m表示euv扫描仪的投射光学单元的放大倍率。euv掩模400的图案元件350的位移650的方向和幅度由于euv掩模400的曲率而与局部曲率euv掩模的厚度t以及由参数k所描述的中性轴线610的位置变化成比例,并且用euv步进机的投射反射镜的放大或缩小来缩放。
[0146]
图7再次从图4的上部分图像405再现弯曲的euv掩模400。为了清楚起见,图7中省略了掩模400的图案元件350。此外,图700示出了在讨论图5和图6期间引入的一些变量。如图6所示,虚线610表示euv掩模400的中性轴线610。字母t描述了euv掩模400的厚度。更准确地说,t标识了euv掩模400的平均厚度。变量k
·
t表征euv掩模400的中性轴线610的位置。角度描述局部曲率。对于euv掩模,全局曲率410典型地由拟合到所测量的高度轮廓的二阶多项式来确定:
[0147]
z
fit
=a b
·
x c
·
y d
·
x
·
y e
·
x2 f
·
y2。
ꢀꢀꢀ
(3)
[0148]
图8中的图800示意性地再现了来自图4的下部分图像495,其中euv掩模400被静电卡盘430保持在预定义位置。由等式(3)描述的euv掩模400的全局曲率410通过将euv掩模400夹持到静电卡盘430上而实质上被移除。结果,图案元件350位移。ipd误差源于图案元件350的位移和残余局部斜率,其源于掩模的背面315和掩模的正面325的平坦度:
[0149]
局部斜率可以定义为如下:
[0150][0151]
其中δx表示等式(3)中二阶拟合的网格点的间隔。局部斜率通常以μrad指示。或者,也可以通过局部斜率乘以所选网格间隔来定义表面不均匀。
[0152]
由于esc 430的静电吸引力,euv掩模400的背面315形变,结果后者实质上在整个区域上承载在静电卡盘430的表面460上。euv掩模400的背面315的不均匀420至少部分地通过基板310的刚性结构和多层结构370转移到euv掩模400的正面325。euv掩模400的正面325的所得到的附加不均匀470导致euv掩模400的正面325上的图案元件350的位移。图案元件350的总位移850也称为图像放置误差(ipe)。图片放置误差描述为如下:
[0153]
ipe
ipd
=k
·
t
·
φ
·
m
ꢀꢀꢀ
(5)
[0154]
其中变量具有上面介绍的含义且φ表示掩模的背面的局部斜率(local slope back
)315。
[0155]
图9的上部分图像905呈现了穿过用于在测量环境150中固定第二实施例中的反射式光掩模400的安装件900的示意性截面面。在图9的示例性实施例中,安装件900体现为卡盘900的形式。卡盘900可以被实施为真空卡盘(vc)或静电卡盘(esc)的形式。被配置用于保持或固定反射式掩模400的安装件900的表面910具有不均匀920,出于说明原因在图9中大幅夸大地示出该不均匀。卡盘900的表面910的不均匀920可以通过测量单元确定为表面不
均匀数据930。下面在图15的上下文中解释该测量过程。
[0156]
卡盘900的表面910的不均匀920可能源于卡盘900的表面910的抛光过程。抛光过程可以产生具有两位数纳米范围内的残余不均匀的表面。卡盘900的热应力同样会导致表面910的不均匀920。
[0157]
将反射式光刻掩模400固定在测量环境150中的安装件900的表面910上。反射式掩模400的背面315的表面不均匀420由安装件900的表面910的不均匀920隐藏或消除。这同样适用于反射式掩模400的内部应力,如图8的上下文中所解释的。
[0158]
在图9的上部分图像905中的测量环境150中测量euv掩模400的图案元件350的放置,即定位。固定掩模400的正面325不均匀940同样可以在图9的上部分图像905中所示的示例性测量环境150中测量。在测量环境150中确定的测量数据(例如图案元件350的放置数据、掩模400的正面325的测量不均匀940和/或测量环境150的上述周围条件)然后旨在被变换到euv掩模400的操作环境450中。该变换过程由图9中的箭头990图示。安装件对掩模400的形变位于掩模400的线性形变范围内。因此,在被抬离安装件900之后,反射式掩模400实质上再次设定其原始形状。
[0159]
图9的下部分图像995图示了来自上部分图像905的在其操作环境450中的euv掩模400。euv掩模400通过操作环境450中的静电卡盘430固定。与安装件900相反,假设——如在图4的讨论中已经解释的——静电卡盘430的表面460实质上是平坦的。下面进一步假设,esc 430在euv掩模400上施加足以使反射式掩模400的背面315形变的力,使得所述背面实质上通过整个区域承载在esc 430的表面460上。在这些先决条件下,esc 430实质上补偿了euv掩模400的背面不均匀以及全局曲率410。
[0160]
然而,如在图4的上下文中已经解释的,在esc 430的力影响下,euv掩模400的背面不均匀420至少以衰减的形式通过掩模400传播并且呈现为euv掩模400的正面325上的不均匀940。euv掩模400的正面325的局部不均匀940导致euv掩模400的图案元件350的位置的局部变化。本技术在确定euv掩模400在操作环境450中的图案元件350的放置时考虑图案元件450的位置的变化,所述变化是由euv掩模400的安装件900的表面910的局部不均匀920引起的。
[0161]
现在下面将给出当确定euv掩模400的图案元件350在其操作环境450中的放置时可以考虑euv掩模400的背面不均匀420的装置的各种实施例的解释。
[0162]
图10示意性地示出了穿过用于确定反射式光刻掩模400在其操作环境450中的图案元件350的放置的装置1000的一些部件的截面图。装置1000包括第一构件1010,其可以确定euv掩模400的背面315的表面不均匀数据420和/或反射式光刻掩模400的安装件900的表面不均匀数据920。
[0163]
在第一简单实施例中,第一构件1010具有接口1015。接口1015可以是无线或有线的。经由接口1015,第一构件1010从图10中未图示的外置第一测量装置和/或外置第三测量装置获得数据。该数据包括测量数据或从关于euv掩模400的背面315的不均匀420的测量数据和/或关于测量环境150中的反射式掩模400的安装件900的不均匀的数据导出的数据。如果合适的话,第一构件1010在对应的处理之后经由连接1025将所获得的数据转发到装置1000的评估单元1040。
[0164]
此外,装置1000具有第二构件1020,其可以确定euv掩模400的图案元件350的放置
数据,其中euv掩模400固定在三点安装件140上。三点安装件140对应于euv掩模400的测量环境150,并且所述测量环境与euv掩模400由esc 430保持的操作环境450不一致。此外,第二构件1020可以确定反射式掩模400的正面325的不均匀数据,其中反射式掩模400可以保持在三点安装件140上或者可以通过卡盘900固定。
[0165]
在第一实施例中,第二构件1020具有接口1025。以类似于接口1015的方式,接口1025也可以是无线的或有线的。经由接口1025,第二构件1020可以获得由第一测量单元或第二外置测量装置测量的图案元件350的放置数据,第一测量单元或第二外置测量装置在图10中未示出。此外,装置1000的第二构件1020可以获得关于反射式掩模400的正面325的不均匀940的数据,这些数据是从图10中未示出的第四外置测量装置或第二外置测量装置获得的。获得的掩模400的正面315的放置数据和/或表面不均匀数据940可以记录在euv掩模400的测量环境150和/或操作环境450中。如果合适的话,第二构件1020在对应的处理之后经由连接1030将所获得的数据转发到装置1000的计算单元1040。
[0166]
计算单元1040包括非易失性存储器1050。各种类型的euv掩模400的模型可以存储在非易失性存储器1050中。模型可以描述各种类型的euv掩模的曲率410。此外,该模型可以模拟各种类型的euv掩模的背面不均匀到euv掩模400在其操作环境450中的图案元件350的位置变化的转移。
[0167]
计算单元1040可以含有算法,其根据经由连接1025和1030获得的背面和/或正面的表面不均匀数据和放置数据来计算反射式掩模400的图案元件350在其操作环境450中的放置。计算单元1040可以包括专门设计用于实行euv掩模400的图案元件350的放置的计算的特定部分或实质上所有部分的专用硬件部件1070。硬件部件1070可以包括asic(专用集成电路)。
[0168]
装置1000的计算单元1040可以将图案元件350的放置数据和euv掩模400的背面315和/或正面325的表面不均匀数据420、940转换到公共坐标系中。除了图案元件350的放置数据和背面315和/或正面325的表面不均匀数据420、940外,计算单元1040可以获得表征测量环境150的周围条件的参数。
[0169]
计算单元1040可以具有接口1045,计算单元1040可以经由该接口1045接收和传输数据。作为示例,计算单元1040可以获得关于静电卡盘430的表面或表面平坦度的数据。esc 430的表面典型地被设定为完美平面。然而,计算单元1040还可以经由接口1045接收关于静电卡盘430的表面的平坦度的数据并且在对euv掩模400的操作环境450中图案元件350的放置计算时考虑所述数据。
[0170]
装置1000还可以包括屏幕1060,其经由连接1055从计算单元1040接收数据。所计算的图案元件350的放置可以显示在屏幕1060上。此外,原始数据(即表面不均匀数据420和放置数据)还可以呈现在屏幕1060上。此外,其他数据(例如表征测量环境150和/或操作环境450的其他参数)可以显示在屏幕1060上。
[0171]
图11示意性地示出了第一构件1010的第二示例性实施例。为了确定euv掩模400的背面315的不均匀420,后者固定在三点安装件140上。后者被搁置在高精度载物台上,其在图11中被省略。载物台在三个平移方向上和三个旋转方向上是可移动的。此外,载物台在所有六个自由度中的移动被主动监控和调节。在图11中的第一测量单元1100中,载物台605是唯一可移动的部件。然而,还可以共享载物台与第一测量单元1100的物镜1140之间的移动。
[0172]
在图11中euv掩模400的正面325朝上。所述掩模的背面315可以具有用于下述测量的导电涂层320。然而,还可以在没有导电涂层320的情况下实行测量。第一测量单元1100可以用于确定euv掩模400的背面315的不均匀420。
[0173]
第一测量单元1100包括光源1110。测量单元1100使用激光器系统作为光源1110。激光器系统可以包括在深紫外(duv)波长范围内发射的激光器。激光器系统可以包括arf(氟化氩)激光器,其发射的电磁辐射的波长近似为193nm。然而,激光器系统还可以包括发射电磁光谱的可见光部分的光的激光器。然而,光源1110还可以是euv光源(图11中未示出)。
[0174]
来自光源1110的光穿过聚焦系统,其在图11中的示例性装置1100中实施为自动聚焦系统1120,所述系统被设计为将来自光源1110的光聚焦到euv掩模400的背面315上。部分透射式偏转反射镜1130将来自光源1110的光引导到物镜1140上。后者将来自光源1110的光束聚焦到euv掩模400的背面315。在正常操作期间,如果光源1110使用可见光波长范围内的电磁辐射,则成像物镜1140的数值孔径(na)为0.1至0.2。如果光源1110使用duv波长范围内的光,则成像物镜的na优选地为0.5至0.9的范围内。如果需要,可以通过增加物镜1140的na来增加测量单元1100的分辨能力。可见光或duv光的聚焦使得在euv掩模400的背面315上产生小光斑直径成为可能。这使得可以以高横向空间分辨率扫描euv掩模400的背面不均匀420。
[0175]
从euv掩模300的背面315反射的光的一部分通行穿过至少包括物镜1140和部分透射偏转反射镜1130的光学单元,并且照射到检测器1150上。举例来说,ccd(电荷耦合器件)相机可以用作检测器1150。检测器1150将测量数据经由连接1155通信到信号处理单元1160,该信号处理单元1160从检测器1150的测量数据中生成图像。信号处理单元1160附加地将检测器1150的测量数据转发到计算机系统1170。计算机系统1170可以含有来自图10的计算单元1040。然而,计算机系统1170还可以经由接口1170将检测器1150的测量数据传输到装置1000的计算单元1040以用于进一步处理。
[0176]
装置1100可以包括扫描单元,由于携载三点安装件140的载物台在掩模平面中(即在xy平面中)的位移,该扫描单元使得能够在euv掩模400的有效区域之上扫描euv掩模400的背面表面315。图11中没有再现扫描单元。在替代实施例中,扫描单元可以用物镜1140扫描euv掩模400的背面表面315上方。载物台或三点安装件140和物镜1140的组合移动同样是可能的。
[0177]
在图11中,第一测量单元1100测量euv掩模400的背面不均匀420。然而,还可以使用第一测量单元1100来检查所有类型的常规透射式光掩模100的背面。此外,第一测量单元1100可以确定euv掩模400的正面不均匀。为此,将掩模400在三点安装件上翻转,使得其正面315面向物镜1140的方向。这意味着第一测量单元1100还可以用作第四测量单元,即确定反射式掩模400的正面325不均匀的测量单元。
[0178]
图12示意性地指示了第二构件1020的第二示例性实施例。图12示出了穿过第二测量单元1200的功能图的截面图,该第二测量单元1200可以用来在测量环境150中测量图案元件350在euv掩模400上的位置。以与图11类似的方式,测量环境150中的反射式掩模400被安装在高精度载物台上的三点安装件140的三个半球145上。为了清楚起见,类似于图11,图12中也省略了euv掩模400的弯曲或曲率。图12中没有再现的载物台在三个平移方向上和三
个旋转方向上是可移动的。此外,载物台在全部六个自由度中的移动被主动监控和调节。在图12中的第二测量单元1200中,载物台再次是唯一可移动的部件。
[0179]
第二测量单元1200使用准分子激光器作为光源1210,所述激光器发射近似193nm处的duv波长范围的光。作为标准,成像物镜1240的数值孔径(na)典型地位于0.5和0.9之间。物镜的na可以扩大以便改进测量单元1200的分辨能力。
[0180]
ccd(电荷耦合器件)相机用作检测器1250,所述检测器测量由euv掩模400反射的光。检测器1250将其测量数据经由连接1255传输到信号处理单元1260,该信号处理单元从检测器1250的测量数据中生成图像。信号处理单元1260生成的图像可以显示在计算机系统1270和/或装置1000的屏幕1060上。此外,信号处理单元1260将包括euv掩模400的图案元件350的放置数据的检测器1250的测量数据发送到计算单元1040。计算单元1040可以是装置1000的部分或计算机系统1270的部分。
[0181]
如在图1的上下文中所讨论的,常规光掩模100在三点安装件140下已经展示出下凹(“掩模下凹”)。由于内部应力,euv掩模400附加地具有曲率410。因此,第二测量单元1200具有聚焦系统,其在图12的示例性实施例中被设计为自动聚焦(af)系统1220,其在图12中未示出。af系统1220辅助测量euv掩模400的图案元件350的放置数据的过程。特别地,af系统1220可以用于产生euv掩模400的高度轮廓。借助于af系统1220,测量单元1200可以在记录图案元件350的位置时测量euv掩模400的高度轮廓。如果这些测量数据不足,则测量单元1200可以通过af系统1220在分开测量中确定euv掩模400的高度轮廓。该测量可以由测量单元1200在测量环境150中euv掩模400的温度调节的间隔(均热时间(soaking time))期间来实行,因此测量euv掩模400的高度轮廓实质上不会减少第二测量单元1200的吞吐量或掩模吞吐量。此外,第二测量单元1200可以确定反射式掩模400的正面315的表面不均匀数据470。第二测量单元1200因此可以用作第四测量单元。
[0182]
反射镜1225和部分透射式反射镜1215将激光束从光源1210指引到物镜1240上。
[0183]
测量单元1200还包括用于粗略对准euv掩模400的图案元件350的光学辅助系统1290。另外,测量单元1200可以包括其他辅助系统(图12中未示出),其测量在euv掩模400的附近普遍的周围条件。测量周围条件的辅助系统可以包括干涉仪,特别是激光干涉仪。测量的参数可以包括,例如:温度、气压和空气湿度。测量的参数同样被传输到计算单元1040。
[0184]
计算机系统1270可以在计算机系统1270的屏幕1260上显示由信号处理单元1260计算的图像。以类似于图11中的第一测量单元1100的方式,计算机系统1270可以控制光源1210、载物台的移动、物镜1240和/或af系统1220。此外,计算机系统1270可以包括计算单元1040。
[0185]
在图12中图示的示例中,计算单元1040是计算机系统1270的部分。在替代性实施例中,计算单元1040可以被实施为单独单元,该单独单元可以经由数据连接与数据处理单元1260和/或计算机系统1270交换数据或测量数据。
[0186]
不用说,除了反射式掩模400以外,第二测量装置1200还可以测量各种类型的常规透射式光掩模100的图案元件120、130。
[0187]
图13图示了第二构件1020的第三示例性实施例,其中来自图12的第二测量单元1200也可以作为第一测量单元1100操作。在该实施例中,第二测量单元1200具有翻转单元,其可以交换掩模400的正面325和背面315。图13中未图示第二测量单元1200的所述翻转单
元。翻转单元被设计为,在翻转期间,特别地在安装在三点安装件140上期间,它不会污染或甚至不损坏euv掩模400的正面315。
[0188]
因为第二测量单元1200具有duv光源1110、自动聚焦系统1220、物镜1240和检测器1550,所以它不仅可以用来测量图案元件350的放置,还可以用来确定euv掩模400的背面315的不均匀420。
[0189]
图14示出了组合装置1400的一个示例性实施例,其组合了第一测量单元1100或第一构件1010和第二测量单元1200或第二构件1020。组合装置1400是有利的,因为它可以在不改变euv掩模420的安装状态的情况下确定euv掩模400的背面315的不均匀420并确定图案元件350的放置。从而促进第一测量单元1100和第二测量单元1200的测量数据到公共参考系或坐标系的变换。
[0190]
图14中再现的组合装置1400具有两个信号处理系统1160、1260和两个计算机系统1170、1270。不用说,组合装置1400用一个信号处理单元1260和一个计算机系统1270来管理。此外,组合装置1400具有两个光源1110和1210。可以使用一个光源1210来馈送两个自动聚焦系统1120和1220。此外,组合装置1400中可以省略两个自动聚焦系统1120、1220中的一个。
[0191]
图15示意性地呈现了第三测量单元1500的形式的第一构件1010的第三示例性实施例。第三测量单元1500被设计成确定安装件900或卡盘900的表面910的不均匀920,并且将所测量的数据作为表面不均匀数据930转发到图10的装置1000的计算单元1040。第三测量单元1500典型地在测量环境150中操作。
[0192]
图15中的示例性测量单元1500包括干涉仪1510,其将光束1520指引到安装件900的表面910上。干涉仪可以包括激光干涉仪。从安装件900的表面910反射的辐射1530由干涉仪1510检测。借助于光束1520和1530,干涉仪1510确定光束1520在卡盘900的表面920上的入射点1540与干涉仪1500的参考平面之间的距离。通过在卡盘900的表面920之上扫描光束的入射点1540,可以确定其表面不均匀数据930。干涉仪1510可以在亚纳米范围内沿着光束轴线(即z方向上)以空间分辨率确定表面920。
[0193]
如在图4讨论的上下文中所解释的,在从测量环境150过渡到euv掩模400的操作环境450时,掩模的背面表面的局部不均匀420可能导致其图案元件350的局部位移。可以至少部分地防止和/或校正图案元件350的这种局部位移。就此而言,例如通过在背面312的附近的掩模的基板310中引入像素的一个或多个布置,可以以最大可能程度平滑局部背面不均匀420,因此图案元件350的局部横向位移实质上不会发生。替代地或附加地,可以在掩模基板310的正面322附近将像素的一个或多个布置引入到其上沉积多层结构370的掩模基板310中。所述最后提到的像素的(多个)布置补偿在从测量环境150过渡到操作环境450时发生的图案元件350的局部位移。在申请人名下的专利说明书us 9 658 527和us 9 753 366中指定了关于确定像素的布置并将其引入掩模400的基板310中的细节。
[0194]
最后,图16中的流程图1600给出了用于确定反射式光刻掩模400在其操作环境450中的图案元件350的放置的方法的顺序的概述。在步骤1610中,方法开始。步骤1620涉及在与反射式光刻掩模400的操作环境450不对应的测量环境150中确定反射式光刻掩模400的背面315的表面不均匀数据420和/或反射式光刻掩模400的安装件900的表面不均匀数据930。该步骤可以例如由第一测量单元1100和/或第三测量单元1500实行。指定的方法可以
由装置1000执行。
[0195]
下一步骤1630涉及在测量环境150中确定图案元件350的放置数据。例如,第二测量单元1200可以实行该步骤。
[0196]
步骤1640涉及根据所确定的背面315和/或安装件900的表面不均匀数据420、930和所确定的放置数据计算图案元件350在操作环境450中的放置。装置1000的计算单元1040被设计为实行该步骤。最终,方法结束于步骤1650。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。