1.本发明涉及货到人系统自动化设备技术领域,尤其涉及一种用于货到人系统巷道清障的自动导引车。
背景技术:
2.货到人系统的自动导引车是智慧物流领域的重要应用之一。货到人系统中,货架上存储多种类别的小件货物,在货架搬运过程中,货物存在意外掉落到巷道内的情况,进而影响其它搬运货架的自动导引车的行驶路径。现有技术中的解决方式为:终止整个系统的运行,派人工进入系统清理掉落货物,此方法严重影响了整个系统的运行效率。
3.因此,亟需一种可以实现自动清障的处理方式。
技术实现要素:
4.本发明提供了一种用于货到人系统巷道清障的自动导引车,以解决现有技术问题中存在的缺陷。
5.为了实现上述目的,本发明采取了如下技术方案。
6.一种用于货到人系统巷道清障的自动导引车,包括:
7.机身、捕货空间、激光传感器、感应探测器、挡板、门板以及位于机身底部的脚轮;
8.所述捕货空间位于机身内部,用于存放捕获到的货物;
9.所述激光传感器安装于所述机身顶部,用于对机身前方巷道和周围环境进行感知,实现对导引车的导航动作;
10.所述感应探测器安装于机身上且位于门板的上部,用于感应掉落的货物的位置、大小和形状;
11.所述捕货空间的左右两侧分别安装有挡板,所述挡板通过电动滑轨与所述捕获空间的内部滑动连接,且可以滑动伸出机身外,所述门板为两个对开门的门板,所述两个门板分别与两个挡板电动铰接,两个门板安装于所述捕获空间的外侧使得当挡板沿着滑轨向机身内外滑动时,门板也随之移动。
12.优选地,自动导引车还包括安装于机身内部的控制器,所述控制器分别与所述激光传感器、感应探测器、挡板、门板以及位于机身底部的脚轮电路连接;
13.所述控制器,用于接收激光传感器的位置信息,进而控制脚轮的移动方向;用于接收感应探测器的信号,控制挡板的滑入滑出和门板的启闭:当感应到货物大小能够容纳到捕获空间时,控制打开门板,通过门板左右摆动将货物捕获到捕获空间完成捕获;当感应到货物高度大于捕获空间时,控制挡板滑出并打开门板,通过门板左右摆动将货物捕获到门板、挡板以及捕获空间内部,并关闭门板,直接通过门板、挡板和捕获空间构成的空间将货物捕获到指定位置。
14.优选地,机身内部还安装有可充电铅蓄电池,所述可充电铅蓄电池用于为引导车供电。
15.优选地,挡板和门板的下端还粘结有密封条和毛刷,用于密封与地面之间的缝隙,防止小体积的货物在运送途中卡在缝隙内或者由缝隙漏出。
16.优选地,脚轮为4个安装于机身底部四角的可360
°
转动的脚轮。
17.优选地,机身上还安装有4个指示灯,所述4个指示灯分别用于指示设备是否正常以及挡板是否收缩于机身内部。
18.优选地,机身上还安装有数字显示面板,用于显示设备编号和设备电量。
19.优选地,机身上还安装有电源开关,用于控制导引车的启闭。
20.优选地,门板的外摆动角度为0
°‑
180
°
。
21.由上述本发明的用于货到人系统巷道清障的自动导引车提供的技术方案可以看出,本发明的自动导引车可以在当有货物意外掉落到巷道内时,通过机身顶部的激光传感器自动导航到事故位置,实现与其它搬运货架的自动导引车的避障,无需停运整个系统或派人工进入系统进行事故处理;设备在仓储区域巷道内行驶过程中不转向的情况下将掉落货物直接运送至仓储区域外或者通过原地转向的方式实现转弯并改变行驶方向,一次处理多个地点的货物掉落事故;通过感应器判断货物的位置和形态,将体积较小的货物捕获到机身内部中空的捕货空间内或者将体积超出机身内部捕货空间容量的货物捕获到向外延伸挡板和门板之间形成的捕货空间内;捕获到掉落在巷道内的货物后,门板自动闭合与地面形成一个封闭空间,设备自动导航返回,将掉落货物运送到仓储区域外,恢复巷道内行驶路径的畅通,同时有密封条和毛刷阻挡设备与地面之间的缝隙,防止较小体积的货物在运送途中卡在缝隙内或者漏出。
22.本发明附加的方面和优点将在下面的描述中部分给出,这些将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
23.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
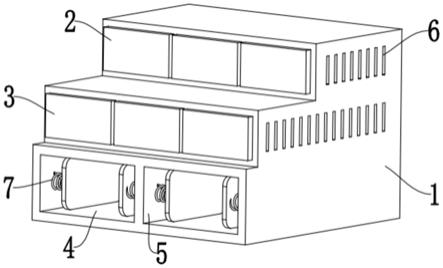
24.图1为实施例的用于货到人系统巷道清障的自动导引车挡板外延门板张开结构示意图;
25.图2为实施例的用于货到人系统巷道清障的自动导引车挡板外延门板闭合结构示意图;
26.图3为实施例的用于货到人系统巷道清障的自动导引车挡板收缩门板张开结构示意图;
27.图4为实施例的用于货到人系统巷道清障的自动导引车挡板收缩门板闭合结构示意图;
28.图5为自动导引车内部电路结构示意图;
29.附图标记说明:
30.1.机身,2.激光传感器,3.指示灯面板,4.数字显示面板,5.感应探测器,6.挡板,7.门板,8.铰链,9.脚轮,10.控制器,11.捕货空间,12.电源开关,13.电池,14.驱动电机,
31.第一指示灯,32.第二指示灯,33.第三指示灯,34.第四指示灯,41.设备编号显示面板,42.设备电量显示面板,61.滑轨凹槽,62.电动滑轨,63.密封条,71.毛刷。
具体实施方式
31.下面详细描述本发明的实施方式,所述实施方式的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本发明,而不能解释为对本发明的限制。
32.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本发明的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。
33.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
34.为便于对本发明实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明,且并不构成对本发明实施例的限定。
35.实施例
36.图1为用于货到人系统巷道清障的自动导引车挡板外延门板张开结构示意图;图2为用于货到人系统巷道清障的自动导引车挡板外延门板闭合结构示意图;图3为用于货到人系统巷道清障的自动导引车挡板收缩门板张开结构示意图;图4为用于货到人系统巷道清障的自动导引车挡板收缩门板闭合结构示意图,参照图1、图2、图3和图4,自动导引车包括:
37.机身1、捕货空间11、激光传感器2、感应探测器6、挡板6、门板7以及位于机身底部的脚轮9;
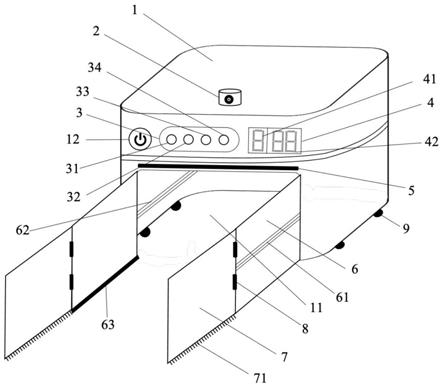
38.捕货空间11位于机身1内部,用于存放捕获到的货物。如图1所示,捕获空间为上部由机身内部围成,底部与地面连通的空间。
39.激光传感器2安装于机身1顶部,用于对机身1前方巷道和周围环境进行感知,实现对导引车的导航动作;
40.感应探测器5安装于机身1上且位于门板7的上部,用于感应掉落的货物的位置、大小和形状;
41.捕货空间11的左右两侧分别安装有挡板6,挡板6通过电动滑轨62与捕获空间11的内部滑动连接,且可以滑动伸出机身1外,如图1所示,滑轨凹槽61安装于捕获空间的侧板上。门板7为两个对开门的门板,两个门板分别与两个挡板电动铰接,本实施例中通过铰链和驱动电机连接,两个门板安装于所述捕获空间的外侧使得当挡板沿着滑轨向机身内外滑动时,门板也随之移动。门板的外摆动角度为0
°‑
180
°
。
42.自动导引车还包括安装于机身内部的控制器10,图5为自动导引车内部电路结构示意图,参照图5,控制器10分别与电池13、驱动电机14、激光传感器2、感应探测器5、挡板6、
门板7以及位于机身底部的脚轮9电路连接。
43.控制器10,用于接收激光传感器2的位置信息,进而控制脚轮9的移动方向;用于接收感应探测器5的信号,控制挡板6的滑入滑出和门板7的启闭:当感应到货物大小能够容纳到捕获空间11时,控制打开门板7,通过门板7左右摆动将货物捕获到捕获空间11完成捕获;当感应到货物高度大于捕获空间11时,控制挡板6滑出并打开门板7,通过门板7左右摆动将货物捕获到门板7、挡板6以及捕获空间11内部,并关闭门板7,直接通过门板7、挡板6和捕获空间11构成的空间将货物捕获到指定位置。
44.其中,门板、挡板以及脚轮均与驱动电机14相连接。
45.控制器10根据感应探测器5传感是否捕获到掉落地面的货物,由控制器向机身内部的驱动电机发出指令进行开闭,两侧门板7同时张开或同时闭合。未捕获到货物时,门板7呈开启状态,开启时,以铰链8为轴向外摆动180
°
后来回摆动;捕获到货物后,门板呈闭合状态,闭合时,以铰链8为轴向内旋转闭合至与挡板6垂直。门板的外摆动角度为0
°‑
180
°
。
46.具体地,机身内部还安装有电池13,电池13为可充电铅蓄电池,可充电铅蓄电池用于为引导车供电。脚轮为4个安装于机身底部四角的可360度转动的脚轮9。机身上还安装有4个指示灯(31、32、33、34),4个指示灯分别用于指示设备是否正常以及挡板是否收缩于机身内部。其中,设备启动后,当设备正常运行时,第一指示灯31亮起呈绿色;当设备故障时,第二指示灯32亮起呈红色;当挡板收缩于机身内部时,第三指示灯33亮起呈黄色;当挡板6通过滑轨向外延伸时,第四指示灯34亮起呈黄色。第一指示灯31与第二指示灯32不可同时亮起,第三指示灯33与第四指示灯34不可同时亮起。
47.挡板6和门板7的下端还粘结有胶质密封条63和尼龙丝毛刷71,用于密封与地面之间的缝隙,防止小体积的货物在运送途中卡在缝隙内或者由缝隙漏出。如图3所示,密封条63黏贴于挡板6的下方,毛刷71黏贴于门板7的下方。
48.机身1上还安装有数字显示面板4,用于显示设备编号和设备电量。数字显示面板4包括设备编号显示面板41和设备电量显示面板42,当设备启动时,设备编号显示面板41亮起呈红色,显示当前设备编号,同时设备电量显示面板42亮起呈红色,显示当前剩余电量。
49.具体地,指示灯面板3和数字显示面板4安装于呈长条状的感应探测器5的下方,通过感应探测器5对设备前方一米内掉落在巷道内的货物位置和形态进行探测与感应。
50.机身上还安装有电源开关12,用于控制导引车的启闭。
51.采用本实施例导引车进行货物捕获的具体步骤为:
52.开启电源开关12,指示灯面板3上的第一指示灯31亮起呈绿色,设备编号显示面板41和设备电量显示面板42分别显示设备编号和电量,当感应探测器5感应到前方地面有掉落货物时,向控制器10发送货物位置指令,控制器10根据感应探测器5的位置,与激光传感器2互联,同时驱动电机14控制脚轮9移动至货物掉落地点。
53.当感应探测器5感应到掉落货物的体积足以纳入机身下方的中空捕货空间11内时,第三指示灯33亮起呈黄色。同时,控制器10通过驱动电机14控制门板7外摆180
°
并左右摆动,当捕获到地面掉落货物后,感应探测器5发送指令至控制器10,控制器10通过驱动电机14控制两侧门板7向内90度旋转闭合,完成对掉落地面货物的捕获;当感应探测器5感应到掉落货物的体积超出机身下方的中空捕货空间11时,第四指示灯34亮起呈黄色。控制器10通过驱动电机14控制门板7和挡板6,两侧挡板6通过滑轨凹槽61和滑轨62延伸到机身外
部,形成更大的捕货空间11,驱动电机14控制门板7外摆180
°
并左右来回摆动,当捕获到地面掉落货物后,两侧门板7在控制器10向驱动电机发出的指令下以铰链8为轴向内90度旋转闭合,完成对掉落地面货物的捕获。
54.捕获到货物后,控制器10与激光传感器2互联,将货物移送至指定位置。
55.综上所述,本实施例的自动导引车可以在货到人系统仓储区域的巷道内行驶,清理从货架上意外掉落的各种形态的小件货物,防止因货物掉落在巷道内阻碍其它自动导引车搬运货架导致系统瘫痪,也能避免系统停止运转并派人工进入系统清障影响系统运行效率。
56.本领域技术人员应能理解上述的应用类型仅为举例,其他现有的或今后可能出现的应用类型如可适用于本发明实施例,也应包含在本发明保护范围以内,并在此以引用方式包含于此。
57.在实际应用中,上述信号处理装置也可以设置在机身的其它位置。本发明实施例并不局限上述信号处理装置的具体放置位置,上述信号处理装置在机身的内部中的任何放置方式都在本发明实施例的保护范围中。
58.本领域技术人员应能理解,上述所举的根据用户信息决定调用策略仅为更好地说明本发明实施例的技术方案,而非对本发明实施例作出的限定。任何根据用户属性来决定调用策略的方法,均包含在本发明实施例的范围内。
59.本领域普通技术人员可以理解:附图只是一个实施例的示意图,附图中的模块或流程并不一定是实施本发明所必须的。
60.通过以上的实施方式的描述可知,本领域的技术人员可以清楚地了解到本发明可借助软件加必需的通用硬件平台的方式来实现。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品可以存储在存储介质中,如rom/ram、磁碟、光盘等,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例或者实施例的某些部分所述的方法。
61.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。