1.本发明涉及图像技术领域,特别涉及一种简单的去噪编码方法。
背景技术:
2.图像滤波,即在尽量保留图像细节特征的条件下对目标图像的噪声进行抑制。大部分滤波算法为平滑滤波,即低频增强的空间滤波技术。平滑滤波算法一般采用一个包含加权系数的窗口作为滤波器,游走于图像的每一个像素点,通过加权计算方法得到滤波后的像素值。
3.但现有技术中的缺陷在于:平滑滤波算法存在计算量大,对图像像素值的改变较多,模糊图像细节边缘等问题,不适用于图像的实时编码和主观观赏。
4.此外,现有技术中的常用术语如下:
5.灰度共生矩阵:是一种研究灰度空间相关特性来描述纹理的常用方法,而纹理是由灰度分布在空间位置上反复出现而形成的,因而在图像空间中相隔某距离的两像素之间存在一定的灰度关系。如果图像是由具有相似灰度值的像素块构成,则灰度共生矩阵的对角元素会有比较大的值;如果图像像素灰度值在局部有变化,那么偏离对角线的元素会有比较大的值。
技术实现要素:
6.为了解决上述问题,本发明的目的在于:本发明计算量小,在不模糊图像细节和保留平坦区域亮度层次感的前提下更利于图像压缩。经分析只有平坦区域的较强噪声能比较好的识别,因此本发明主要针对平坦区域中的较强噪声进行滤波,减少预测残差信息量,更利于变换过程中残差能量的集中和高频分量的减少,进而降低码流在噪声上的消耗。
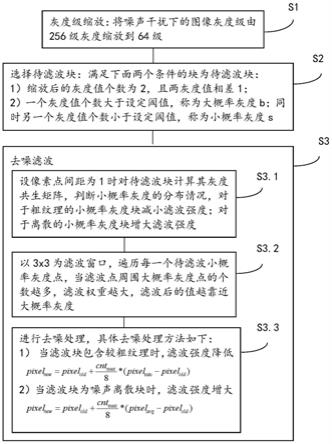
7.具体地,本发明提供一种简单的去噪编码方法,将编码前的原始图像以16x16块为单位进行分析和去噪滤波,包括以下步骤:
8.s1,灰度级缩放:将噪声干扰下的图像灰度级由256级灰度缩放到64级;s2,选择待滤波块:满足下面两个条件的块为待滤波块:
9.1)缩放后的灰度值个数为2,且两灰度值相差1;
10.2)一个灰度值个数大于设定阈值,称为大概率灰度b;同时另一个灰度值个数小于设定阈值,称为小概率灰度s;
11.s3,去噪滤波:
12.s3.1,设像素点间距为1时对待滤波块计算其灰度共生矩阵,判断小概率灰度的分布情况,将待滤波块分为小概率粗纹理块和离散块,对于粗纹理的小概率灰度块减小滤波强度;对于离散的小概率灰度块增大滤波强度;
13.s3.2,以3x3为滤波窗口,遍历每一个待滤波小概率灰度点,当滤波点周围大概率灰度点的个数越多,滤波权重越大,滤波后的值越靠近大概率灰度;
14.s3.3,进行去噪处理,具体去噪处理方法如下:
15.1)当滤波块包含较粗纹理时,滤波强度降低
[0016][0017][0018][0019]
2)当滤波块为噪声离散块时,滤波强度增大
[0020][0021][0022]
其中,pixel
old
和pixel
ne
w分别为滤波前后的像素值,cnt
max
为窗口内大概率灰度点的个数,pixel
min
和pixel
avg
为窗口内大概率灰度中的最小像素值和平均值。
[0023]
所述s1中图像灰度级缩放到64级,是将缩放前的:
[0024]
161160162161162161163122160161164128158159133130
[0025]
缩放为:
[0026]
40404040404040304040403239393332
[0027]
以矩阵表示。
[0028]
所述s2中的阈值设置为220。
[0029]
所述的s2中待滤波块中小概率点为不平坦因子,不利于预测变换后能量的集中,需要通过滤波算法向大概率灰度靠近。
[0030]
所述s3.1中所述判断小概率灰度的分布情况,相邻小概率灰度的个数越小,斜对角线的和越大,小概率点越离散;反之小概率点的纹理越粗。
[0031]
所述的s3.1中灰度共生矩阵为
[0032][0033]
所述s3进一步包括,减少对较粗纹理的模糊或消除,设阈值gray_thr=220。
[0034]
由此,本技术的优势在于:经过上述方法去噪后的图像,经预测变换后,残差能量更容易集中到低频分量,高频残留的系数值减少或在量化过程中被量化为0,从而减少了噪声在码流中的消耗。量化参数越小,码流减少越多。
附图说明
[0035]
此处所说明的附图用来提供对本发明的进一步理解,构成本技术的一部分,并不构成对本发明的限定。
[0036]
图1是本发明方法的流程示意图。
具体实施方式
[0037]
为了能够更清楚地理解本发明的技术内容及优点,现结合附图对本发明进行进一步的详细说明。
[0038]
如图1所示,本发明涉及一种简单的去噪编码方法,适用于基于块的预测编码标准,将原始图像以16x16块为单位进行划分,识别受噪声影响的平坦块,对不同类型的平坦块使用相应的滤波算子做滤波。该方法计算量小,能针对性的减少噪声,提高编码压缩率,同时对观赏质量影响极小。包括以下步骤:
[0039]
s1,灰度级缩放:将噪声干扰下的图像灰度级由256级灰度缩放到64级;s2,选择待滤波块:满足下面两个条件的块为待滤波块:
[0040]
1)缩放后的灰度值个数为2,且两灰度值相差1;
[0041]
2)一个灰度值个数大于设定阈值,称为大概率灰度b;同时另一个灰度值个数小于设定阈值,称为小概率灰度s;
[0042]
s3,去噪滤波:
[0043]
s3.1,设像素点间距为1时对待滤波块计算其灰度共生矩阵,判断小概率灰度的分布情况,对于粗纹理的小概率灰度块减小滤波强度;对于离散的小概率灰度块增大滤波强度;
[0044]
s3.2,以3x3为滤波窗口,遍历每一个待滤波小概率灰度点,当滤波点周围大概率灰度点的个数越多,滤波权重越大,滤波后的值越靠近大概率灰度;
[0045]
s3.3,进行去噪处理,具体去噪处理方法如下:
[0046]
1)当滤波块包含较粗纹理时,滤波强度降低
[0047][0048]
2)当滤波块为噪声离散块时,滤波强度增大
[0049][0050]
其中,pixel
old
和pixel
new
分别为滤波前后的像素值,cnt
max
为窗口内大概率灰度点的个数,pixel
min
和pixel
avg
为窗口内大概率灰度中的最小像素值和平均值。
[0051]
具体地,h264和h265编码协议都是基于预测变换编码的,因此编码残差能量越集中、高频系数越少,图像的压缩率越高。图像边缘区域的噪声不易识别,强行去噪会模糊细节,而平坦区域的弱噪声混杂在亮度真实的层次感中,因此平坦区域的较强噪声更易识别和去除,为了更小的减少图像像素值的改动,本发明只对平坦区域的较强的噪声进行滤波,以保留因丰富的灰度级而形成的亮度层次感。
[0052]
将编码前的原始图像以16x16块为单位进行分析和去噪滤波。
[0053]
1.灰度级缩放
[0054]
噪声干扰下的256级图像中的主观平坦区域并非绝对平坦,为了更好的识别平坦区域,我们可以将图像灰度级缩放到64级。缩放效果如下矩阵所示。
[0055][0056]
2.选择待滤波块
[0057]
满足下面两个条件的块为待滤波块:
[0058]
1)缩放后的灰度值个数为2,且两灰度值相差1
[0059]
2)一个灰度值个数大于设定阈值,同时另一个灰度值个数小于设定阈值。分别称为大概率灰度b和小概率灰度s。建议阈值设置为220。
[0060]
一般小概率灰度呈以下几种分布:
[0061]
4040404040393939404040404040404040404040403939394040404040404040404040404039393939404040404040404040404040404039394040404040404040404040404040403939394040404040404040404040404040393940404040404040404040404040404039394040404040404040404040404040393939404040
4040404040404040404040403940404040404040404040940404040403940404040404040404094040404040403940404040404040404040404040404040394040393940404040404040404040404040403939404040404040409404040404040404040404040404040404040404040404040404040404040404040404040
[0062]
待滤波块中小概率点为不平坦因子,不利于预测变换后能量的集中,需要通过滤波算法向大概率灰度靠近,在不影响图像内容的前提下提高压缩率。同时保护了大概率灰度对应的原始像素值的真实亮度层次感。
[0063]
3.去噪滤波
[0064]
设像素点间距为1时对待滤波块计算其灰度共生矩阵,判断小概率灰度的分布情况,相邻小概率灰度的个数越小,斜对角线的和越大,小概率点越离散;反之小概率点的纹理越粗。对于较粗纹理的小概率灰度块减小滤波强度;对于离散的小概率灰度块增大滤波强度。减少对较粗纹理的模糊或消除。设阈值gray_thr=220。
[0065][0066]
灰度共生矩阵
[0067]
以3x3为滤波窗口,遍历每一个待滤波小概率灰度点,当滤波点周围大概率灰度点的个数越多,滤波权重越大,滤波后的值越靠近大概率灰度。具体去噪处理方法如下:
[0068]
1)当滤波块包含较粗纹理时,滤波强度降低
[0069][0070][0071]
2)当滤波块为噪声离散块时,滤波强度增大
[0072]
[0073][0074][0075]
其中,pixel
old
和pixel
new
分别为滤波前后的像素值,cnt
max
为窗口内大概率灰度点的个数,pixel
min
和pixel
avg
为窗口内大概率灰度中的最小像素值和平均值。
[0076]
经过上述方法去噪后的图像,经预测变换后,残差能量更容易集中到低频分量,高频残留的系数值减少或在量化过程中被量化为0,从而减少了噪声在码流中的消耗。量化参数越小,码流减少越多。
[0077]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。