1.本发明涉及电机技术领域,具体涉及一种辨别霍尔传感器故障和电机堵转的电机的控制方法。
背景技术:
2.电机包括转子和定子,在电机工作过程中通常使用开关霍尔(hall)传感器检测转子是否连续转动,从而判断电机是否发生堵转。当霍尔传感器输出的霍尔信号异常时,有可能是电机出现堵转或者霍尔传感器出现故障。如果不对电机堵转或者霍尔传感器故障进行区分,当霍尔传感器发生故障时按照电机堵转策略持续进行反转控制,可能会造成电机的损伤,因此,如何区分电机堵转或者霍尔传感器故障是一个技术问题。
技术实现要素:
3.本发明的目的在于提供一种控制方法,用于控制电机,该控制方法能够区分电机堵转和霍尔传感器故障。
4.为实现上述目的,本发明采用如下技术方案:
5.一种控制方法,用于控制电机,其特征在于,所述控制方法包括:
6.根据驱动信号驱动电机运行;
7.接收霍尔传感器输出的第一霍尔信号,判断第一霍尔信号是否异常;
8.当第一霍尔信号异常时,增大线圈的驱动电流至大于设定值,并再次接收增大线圈的驱动电流至大于设定值后的霍尔传感器输出的第二霍尔信号,并判断第二霍尔信号是否异常;
9.如果是,则判断为霍尔传感器发生故障,并上报对应信息;如果否,则判断为电机发生堵转,并上报对应信息。
10.本技术方案在第一霍尔信号异常时,通过增大线圈的驱动电流至大于设定值,并再次接收和判断第二霍尔信号是否异常,根据该次第二霍尔信号结果能够区分霍尔传感器故障或电机堵转,当霍尔传感器发生故障时能够避免按照电机堵转策略持续进行反转控制,减少对电机的损伤,控制方法简单。
附图说明
11.图1是电动阀的一种实施方式的结构示意图;
12.图2是电动阀的控制方法的第一实施方式的流程示意图;
13.图3是电机正常运行时定子线圈电流ia、霍尔传感器输出信号的示意图;
14.图4是电机异常时定子线圈电流ia、霍尔传感器输出信号的示意图;
15.图5是定子线圈电流增大后的定子线圈电流ib、霍尔传感器输出信号一种可能的示意图;
16.图6是霍尔传感器输出信号变化趋势的一种可能的示意图;
17.图7是定子线圈电流增大后的定子线圈电流ib、霍尔传感器输出信号另一种可能的示意图;
18.图8是霍尔传感器输出信号变化趋势的另一种可能的示意图;
19.图9是电动阀的控制方法的第二实施方式的流程示意图;
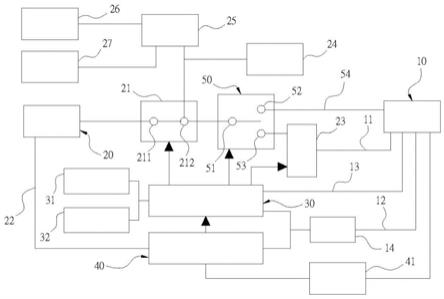
20.图10是电动阀的另一种实施方式的结构示意图;
21.图11是电动阀的控制方法的第三实施方式的流程示意图。
具体实施方式
22.下面结合附图和具体实施例对本发明作进一步说明:
23.图1为电动阀的一种实施方式的结构示意图,电动阀可以应用于汽车空调系统中,用于系统的流量调整和/或流量通断控制。电动阀100包括电机、阀芯、阀体1以及电路板2。阀体1具有阀口,电机可以为步进电机,电机包括转子组件和定子组件,定子组件包括定子线圈3,转子组件包括具有永磁材料的转子4,定子线圈3与电路板2可以电连接/信号连接,本实施例中定子线圈3与电路板2通过线圈供电线5或插针电连接。电路板2可以集成有控制系统,当然控制系统也可以位于上位机。控制系统能够发送驱动信号至电机使定子线圈3通电,定子线圈3通电后产生激励磁场,转子4在激励磁场作用下转动并带动电动阀的阀芯相对阀口移动,使阀口达到相应的开度,从而调节电动阀的流量。本实施例中电机具体作为电动阀应用,当然也可以应用于其他产品,如电动泵等。
24.此外,电动阀还包括霍尔传感器6,霍尔传感器6位于转子4的外周或内周,霍尔传感器6可以与定子组件固定连接(图上未示出),霍尔传感器6还可以与电路板2固定连接;霍尔传感器与电路板电连接或信号连接。霍尔传感器能够检测经过霍尔传感器所在位置的转子的磁场变化,输出霍尔信号至控制系统,控制系统根据该霍尔信号能够检测转子运行位置。霍尔传感器可以为开关型霍尔传感器、线性霍尔传感器、角度霍尔传感器等;选择开关型霍尔传感器,可以降低产品的制造成本。开关型霍尔传感器仅有开、关两种状态,开状态输出高电平信号,关状态输出低电平信号,在本实施例中,当转子转动,转子的磁极n到磁极s或者磁极s向磁极n切换时,霍尔信号发生跳变(以下简称hall信号),如果没有霍尔信号跳变,则认为可能出现霍尔传感器故障或电机堵转,本实施例开关型霍尔传感器的数量为一个。文中霍尔信号是指输出的高、低电平信号,是一种电信号,霍尔传感器与电路板电连接或信号连接,因此霍尔信号可传输至电路板,还可以通过电动阀的接口传输至外部软件。
25.在电动阀正常运行情况下,控制系统能够发送驱动信号至电机使定子线圈3通电,定子线圈3通电后驱动转子4转动,定子线圈电流ia如图3所示随电机的运行呈周期性波峰、波谷变化,当转子的磁极n到磁极s或者磁极s向磁极n切换时,霍尔传感器依次交替输出高、低电平信号,根据霍尔传感器输出信号通过外部软件可以判断转子的具体转动情况。当霍尔传感器输出信号异常时,由于开关型hall传感器仅输出高、低电平信号,所以hall信号异常时hall信号曲线如图4所示呈直线状不发生跳变,可能的故障原因有两种,一种是电机堵转,转子卡死,另一种是霍尔传感器故障。
26.参见图2,图2为图1所示的电动阀的第一实施方式的控制方法的流程示意图,通过该控制方法能够区分究竟是电机堵转还是霍尔传感器故障导致的霍尔传感器信号异常。该控制方法包括以下步骤:
27.s11:根据驱动信号按正常驱动电流驱动电机运行。驱动信号可以为lin信号,也可以是其他驱动信号。
28.s12:接收霍尔传感器输出的第一hall信号并判断第一hall信号是否异常,如果否,则正常运行电机,如果是,执行步骤s13。为了增加可靠性,hall信号异常指hall信号不发生跳变并持续一段时间,比如至少2个周期电机运行8个全步产生4个hall信号一直不跳变才判断为hall信号异常,否则异常时间太短可能影响判断结果。这里一个周期是指转子的磁极n到磁极s再到磁极n或者转子的磁极s到磁极n再到磁极s,一个周期电机运行4个全步输出2个hall信号。
29.s13:发送驱动信号增大作用于定子线圈的驱动电流至大于预设的第一电流阈值并持续设定时长。同上,设定时长可以是2个周期及以上,持续时间太短可能影响判断结果。
30.s14:再次接收该设定时长内的霍尔传感器发送的第二hall信号并判断第二hall信号是否异常,如果是,判断为霍尔传感器故障,并上报对应信息;如果否,判断为电机发生堵转,并上报对应信息。此处的hall信号异常同样地持续一段时间比如至少2个周期电机运行8个全步产生的4个hall信号一直不跳变才判断为hall信号异常。
31.在电机和霍尔传感器正常运行情况下,转子产生的磁场强度是大于定子线圈产生的漏磁的磁场强度(漏磁指磁源通过特定磁路泄露在空气(空间)中的磁场能量),通常我们希望霍尔传感器灵敏地能够在整个温度检测范围内检测到转子产生的磁场变化,但不希望霍尔传感器太过灵敏以致同时检测到定子线圈产生的磁场的漏磁,否则会影响转子位置判断的精度。但在hall信号异常时,增大作用于定子线圈的驱动电流能够增强定子线圈所产生的磁场,从而增大定子线圈的漏磁,使定子线圈驱动电流ib增大至大于等于预设的第一电流阈值,此时,定子线圈产生的磁场的漏磁已经大到可以使霍尔传感器检测到并输出信号,如果霍尔传感器检测到定子线圈所产生的磁场的漏磁,霍尔传感器输出如图5所示的周期性高、低电平交替变化的信号,则可以判断为是电机堵转,转子被卡死,而非霍尔传感器出现故障。如图6所示,该图对应上述过程中霍尔传感器输出信号的变化趋势,在开始时,hall信号正常,高、低电平交替变化,随后hall信号异常,然后在a点处开始增加定子线圈驱动电流,在霍尔传感器处产生了一定的漏磁并被检测到,hall信号发生跳变,输出高、低电平信号,增加定子线圈驱动电流后的hall信号输出的波形可以与正常时波形相同,因为施加于定子线圈的电流频率不变,所以hall信号频率也不变,虽然定子线圈的驱动电流加大,导致霍尔传感器处磁场强度增加,但开关型霍尔传感器只会输出高、低电平两种信号,所以hall信号输出的波形与正常时波形相同。
32.如果霍尔传感器仍然不能检测到定子线圈所产生的漏磁,hall信号依旧异常,如图7所示,则可以判断为是霍尔传感器出现故障,并非电机堵转。如图8所示,该图对应上述过程中hall信号的变化趋势,在开始时,hall信号正常,高、低电平交替变化,随后hall信号异常不发生跳变,然后在a点出开始增加定子线圈驱动电流并持续设定时长,在设定时长内hall信号仍然无变化。
33.最后,通过控制系统将对应信息(霍尔传感器故障或者电机堵转)上报至与控制系统连接的上位机/主控制器中。
34.预设的第一电流阈值跟定子线圈漏磁的磁场强度、霍尔传感器的参数以及霍尔传感器的安装位置等相关。在定子线圈驱动电流大于或等于预设的第一电流阈值时,此时定
子线圈所产生的漏磁的磁场已足够让霍尔传感器检测到并输出高、低电平信号,即在霍尔传感器处的定子线圈漏磁的磁场强度大于霍尔传感器高、低电平发生转换的操作点的磁场强度。此外,霍尔传感器与定子线圈之间的安装位置也会影响霍尔传感器处的磁场强度,霍尔传感器与定子线圈之间距离越大,预设的第一电流阈值越大。因此预设的第一电流阈值需根据电动阀实际情况确定,不同的电动阀第一电流阈值可能不同。第一电流阈值需要考虑芯片和电机能够承受的电流,不宜过大,建议小于设计方案最大电流限值,通常第一电流阈值为定子线圈正常驱动电流的1.5-2倍。
35.通过上述控制方法能够有效判别导致hall信号异常的具体原因,究竟是霍尔传感器故障还是电机堵转,从而可以针对判断结果更好地做出应对措施,避免霍尔传感器发生故障时按照电机堵转策略持续进行反转控制,减少对电机的损伤;不需要增加额外检测元件,控制成本低。此外,加大定子线圈的驱动电流可以增加电机的驱动力,当堵转不是很严重时增加的驱动力可能能够推动转子使其正常转动,有利于电机的正常运行。
36.上述方法中举例了一个霍尔传感器的情形,当然也可以推及并应用到两个、多个霍尔传感器的情形。下面介绍两个霍尔传感器的情形,两个霍尔传感器分别记为第一霍尔传感器hall1、第二霍尔传感器hall2,其流程示意图如图9所示,对应的电动阀的第二实施方式的控制方法包括以下步骤:
37.s21:根据驱动信号按正常驱动电流驱动电机运行。
38.s22:分别接收第一霍尔传感器hall1输出的第一霍尔信号、第二霍尔传感器hall2输出的第二霍尔信号并判断第一霍尔信号、第二霍尔信号是否均异常,如果是,执行步骤s24,如果否,执行步骤s23。
39.s23:判断步骤s22接收的第一霍尔信号、第二霍尔信号是否均正常,如果是,则正常运行电机,如果否,判断为第一霍尔传感器、第二霍尔传感器中一个故障,并上报对应故障信息或报警。
40.如果否,则表示hall信号一个异常一个正常,说明电机是正常运行的,是其中一个霍尔传感器出现故障,至于具体是哪个传感器故障,从对应hall信号可以判断,hall信号异常的传感器就是故障的传感器。hall信号正常是指hall信号随电机运行发生跳变,交替输出高、低电平。
41.s24:发送驱动信号增大作用于定子线圈的驱动电流至大于预设的第一电流阈值并持续设定时长。步骤s24执行完后进行步骤s25。
42.s25:分别接收该设定时长内第一霍尔传感器输出的第三霍尔信号、第二霍尔传感器输出的第四霍尔信号并判断第三霍尔信号、第四霍尔信号是否均异常,如果是,判断第一霍尔传感器、第二霍尔传感器均出现故障,并上报故障信息或报警;如果否,执行步骤s26。
43.s26:判断步骤s25接收的第三霍尔信号、第四霍尔信号是否均正常,如果是,判断为电机堵转,并上报对应信息或报警;如果否,判断为电机堵转故障并且第一霍尔传感器、第二霍尔传感器中一个故障,并上报对应信息或报警。
44.如果否,则表示霍尔传感器信号一个正常一个异常,有一个hall信号正常则说明电机堵转,但另一个hall信号异常则说明该霍尔传感器故障。至于具体是哪个传感器故障,从对应hall信号可以判断,hall信号异常的传感器就是故障的传感器。
45.与一个霍尔传感器的控制方法相比,本控制方法相对较复杂。当然,也可以简化控
制方法如一个霍尔传感器,在检测到hall1、hall2传感器至少一个异常时便对定子线圈增加驱动电流,增加驱动电流后仍有至少一个异常时认为是霍尔传感器出现故障时,直接上报故障,维修时将两个霍尔传感器均更换即可。可以理解的是,霍尔传感器数量也可以是3个或者更多,控制方法类似,在此就不在列举。
46.参见图10,图10为本发明提供的另一种实施方式电动阀的结构示意图,与图1所示的电动阀相比,本实施例中多了检测线圈7,检测线圈7也与电路板2电连接/信号连接,检测线圈7选取体积小的型号,可以节省安装空间,检测线圈位于霍尔传感器6周围,检测线圈和霍尔传感器可以与定子组件固定连接。在电动阀正常工作时,电路板的控制系统不发送驱动信号至检测线圈,检测线圈不工作。当霍尔传感器输出信号异常时,控制系统发送驱动信号使定子线圈的驱动电路关闭,定子线圈不通电,而对检测线圈通电,通过检测线圈的输出结果判断故障原因,具体流程示意图如图11所示,对应的第三实施方式的控制方法包括以下步骤:
47.s31:根据驱动信号按正常驱动电流驱动电机运行。
48.s32:接收并判断霍尔传感器输出的第一霍尔信号是否异常,如果否,则正常运行电机,如果是,执行步骤s33。
49.s33:发送驱动信号关闭定子线圈的驱动电路,对检测线圈施加大于第二电流阈值的驱动电流并持续设定时长。
50.s34:接收并判断该设定时长内霍尔传感器输出的第二霍尔信号是否异常,如果是,判断为霍尔传感器故障,并上报对应故障信息或报警;如果否,判断为电机堵转,并上报对应信息或报警。
51.除了步骤s33与图2所示的步骤13有不同外,其余步骤均与第一实施方式相同。步骤s33中,首先关闭定子线圈的驱动电路,使定子线圈不通电,无论转子是卡死或正常状态,定子线圈不通电,转子不转动,在转子停止转动的状态下再对检测线圈施加驱动电流使其产生磁场,使霍尔传感器检测并输出信号,替换了第一实施方式中增加定子线圈的驱动电流的方案,同样能够起到区分电机堵转还是霍尔传感器故障的效果。
52.同样地,施加在检测线圈的驱动电流需大于等于预设的第二电流阈值,第二电流阈值与第一电流阈值类似,第二电流阈值跟检测线圈本身属性、霍尔传感器的参数以及检测线圈与霍尔传感器之间的安装位置等相关,检测线圈驱动电流大于或等于预设的第二电流阈值时,检测线圈产生的磁场强度已足够让霍尔传感器检测到并输出信号,类似的预设的第二电流阈值需根据实际情况确定。可以理解的是,本实施方式的控制方法也不仅限霍尔传感器数量为1个,可以推及并应用到两个、多个霍尔传感器的情形,,当两个霍尔传感器时可采用与图9类似流程,将s24的步骤替换为送驱动信号关闭定子线圈的驱动电路,对检测线圈施加大于第二电流阈值的驱动电流并持续设定时长。
53.需要说明的是:以上实施例仅用于说明本发明而并非限制本发明所描述的技术方案,尽管本说明书参照上述的实施例对本发明已进行了详细的说明,但是,本领域的普通技术人员应当理解,所属技术领域的技术人员仍然可以对本发明进行修改或者等同替换,而一切不脱离本发明的精神和范围的技术方案及其改进,均应涵盖在本发明的权利要求范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。