1.本说明书一个或多个实施例涉及水下作业技术领域,尤其涉及一种水下推土机。
背景技术:
2.城市内涝救援、矿井应急排水、河道疏浚整平、近海砂石回填和湖泊堤坝维护等工程中的水下推土清障任务,因为处于水下,且环境复杂的等因素,开展工作较为艰难。
3.目前,进行水下推土清障工作时,通常采用水上船只配合水下人工的方式进行,一方面,船只对于环境的要求较高,对于浅水以及狭窄区域,船只不能进入工作;另一方面,水下作业对于下潜人员的危险较大,作业强度较高,且水下情况复杂,同时伴有塌方和爆炸危险,所以,现有的水下推土清障方案适用局限较大,且危险性较高。
技术实现要素:
4.有鉴于此,本说明书一个或多个实施例的目的在于提出一种水下推土机,以解决现有的水下推土清障方案适用局限较大,且危险性较高的问题。
5.基于上述目的,本说明书一个或多个实施例提供了一种水下推土机,包括:
6.车架;
7.推土机构,设置于车架的前端,被配置为进行推土作业;
8.履带驱动机构,设置于车架的底部,被配置为实现水下推土机在水底的移动;
9.液力推进机构,设置于车架,被配置为控制水下推土机在水中的上浮和下沉;
10.水下监测机构,设置于车架,被配置为监测水下推土机所处的环境和水下推土机的工作状态。
11.可选的,推土机构,包括:推土铲、推杆和推土铲调节油缸;推土铲与推杆连接;推杆和推土铲调节油缸连接;推土铲调节油缸通过连杆拖动推土铲移动进行推土作业。
12.可选的,履带驱动机构,包括:履带驱动马达、减速机、驱动轮和履带;履带驱动马达通过减速机与驱动轮连接;驱动轮与履带连接;履带驱动马达通过减速机驱动驱动轮,驱动轮带动履带旋转;履带由履带板依次排列闭合组成;履带板为菱形履带板。
13.可选的,液力推进机构,包括至少三个液力推进器;液力推进器均匀分布设置在车架的外表面;液力推进器通过调整推进的方向和推进力来控制水下推土机的上浮和下沉,以及调整水下推土机的方向和姿态。
14.可选的,车架为矩形,液力推进机构,包括:四个液力推进器,分别设置在矩形车架的顶端的四角位置。
15.可选的,水下监测机构,包括:水下声呐、水下压力传感器和水下定位装置;
16.水下推土机所处的环境包括:通过设置在车架的前端的水下声呐监测到的水下推土机行进方向的地形地貌;
17.水下推土机的工作状态包括:通过设置在车架的水下压力传感器监测到的水下推土机的工作水深,以及设置在车架的水下定位装置监测到的水下推土机所处的地理位置及
移动路径。
18.可选的,水下推土机,还包括:
19.液压控制系统,设置于车架,被配置为控制水下推土机的液压动力;
20.电子控制系统,设置于车架,被配置为控制水下推土机的作业动作;
21.液压动力站,设置于水面或者陆地,通过油电复合脐带缆与液压控制系统连接,被配置为提供液压动力;
22.遥控操作台,设置于水面或者陆地,通过油电复合脐带缆与电子控制系统连接,被配置为遥控操作水下推土机。
23.可选的,液压控制系统,包括:液压阀;液压阀分别设置在液压控制系统和推土调节油缸、履带驱动马达、液力推进器的连接管道上;通过电子控制系统控制液压阀的开闭程度;
24.水下监测机构,还包括:液压传感器,液压传感器设置在液压控制系统,用于监测液压控制系统的液压压力。
25.可选的,遥控操作台,包括:工控机、显示屏和遥控手柄;工控机与电子控制系统连接;显示屏与工控机连接;遥控手柄与工控机连接;
26.通过遥控手柄发出指令信息到工控机,工控机处理指令信息,并通过电子控制系统控制水下推土机作业;
27.工控机接收电子控制系统传输的水下推土机的数据信息,并将数据信息显示在显示屏上。
28.可选的,遥控手柄,包括:第一遥控手柄和第二遥控手柄;第一遥控手柄,用于控制液力推进机构;第二遥控手柄,用于控制推土机构和履带驱动机构。
29.从上面所述可以看出,本说明书一个或多个实施例提供的一种水下推土机,包括:车架、推土机构、履带驱动机构、液力推进机构和水下监测机构。使用液力推进器控制水下推土机在水中的上浮和下沉,每个液力推进器的方向和动力大小均可调节,使得水下推土机可以灵活适应水下的工作环境;使用液压动力站作为动力能源,安全性能较好;使用菱形履带板,能够增加履带和水底的接触面积,不积压泥土,使得水下推土机能够适应水下的稀软地质条件;通过可视的遥控操作,安全性能较好,方便快捷。
附图说明
30.为了更清楚地说明本说明书一个或多个实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本说明书一个或多个实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
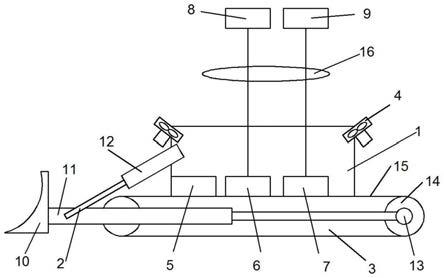
31.图1为本说明书一个或多个实施例提供的水下推土机的主视示意图;
32.图2为本说明书一个或多个实施例提供的水下推土机的俯视示意图;
33.图3为本说明书一个或多个实施例提供的水下推土机的履带板的结构示意图;
34.图4为本说明书一个或多个实施例提供的水下推土机的线路连接结构示意图。
35.图例说明:
36.1、车架;2、推土机构;3、履带驱动机构;4、液力推进机构;5、水下监测机构;6、电子
控制系统;7、液压控制系统;8、遥控操作台;9、液压动力站;10、推土铲;11、推杆;12、推土铲调节油缸;13、履带驱动马达;14、驱动轮;15、履带;16、油电复合脐带缆;17、工控机;18、显示屏;19、遥控手柄。
具体实施方式
37.为使本公开的目的、技术方案和优点更加清楚明白,以下结合具体实施例,并参照附图,对本公开进一步详细说明。
38.需要说明的是,除非另外定义,本说明书一个或多个实施例使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本说明书一个或多个实施例中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
39.为了达到上述目的,本说明书一个或多个实施例提供了一种水下推土机,该水下推土机可以应用于城市内涝救援、矿井应急排水、河道疏浚整平、近海砂石回填和湖泊堤坝维护等工程中的水下推土清障任务,本公开对此不做具体限定。
40.图1为本说明书一个或多个实施例提供的水下推土机的主视示意图,图2为本说明书一个或多个实施例提供的水下推土机的俯视示意图,水下推土机,包括:
41.车架;
42.推土机构,设置于车架的前端,被配置为进行推土作业;
43.履带驱动机构,设置于车架的底部,被配置为实现水下推土机在水底的移动;
44.液力推进机构,设置于车架,被配置为控制水下推土机在水中的上浮和下沉;
45.水下监测机构,设置于车架,被配置为监测水下推土机所处的环境和水下推土机的工作状态。
46.水下推土机,还包括:
47.液压控制系统,设置于车架,被配置为控制水下推土机的液压动力;
48.电子控制系统,设置于车架,被配置为控制水下推土机的作业动作;
49.液压动力站,设置于水面或者陆地,通过油电复合脐带缆与液压控制系统连接,被配置为提供液压动力;
50.遥控操作台,设置于水面或者陆地,通过油电复合脐带缆与电子控制系统连接,被配置为遥控操作水下推土机。
51.一种实施方式中,推土机构,包括:推土铲、推杆和推土铲调节油缸。
52.其中,推土铲与推杆连接,推杆和推土铲调节油缸连接。
53.在一些实施方式中,设置有左右两个推土铲调节油缸,分别设置在车架前端的两侧位置。推土铲调节油缸通过连杆驱动推土铲移动进行推土作业。
54.一种实施方式中,履带驱动机构,包括:履带驱动马达、减速机、驱动轮和履带。履带驱动马达通过减速机与驱动轮连接,驱动轮与履带连接。履带驱动马达通过减速机驱动
驱动轮,驱动轮带动履带旋转,从而实现水下推土机在陆地和水底的移动。履带由履带板依次排列闭合组成。减速机在履带驱动马达和驱动轮之间起匹配转速和传递转矩的作用,使用它的目的是降低转速,增加转矩。
55.在一些实施方式中,设置有两条履带,分别设置在车架底部的两侧位置。相应的,为每条履带设置一个驱动轮和一台履带驱动马达及减速机。履带的两端,设置有两个轮支持履带转动,提供驱动力的轮是驱动轮,另一个轮为从动轮。驱动轮和从动轮的位置是任一的,可以将前端轮设置为驱动轮,也可以将后端轮设置为驱动轮。
56.在一些实施方式中,将后端轮设置为驱动轮。
57.在一些实施方式中,设置有一条履带,设置在车架的底部,以车架底部的中心线为中线均匀设置,相应的设置有一个驱动轮和一台履带驱动马达及减速机。
58.在一些实施方式中,参照图3,履带板为菱形履带板。由于水底和陆地的环境有较大不同,因此需要履带提供较大的接触面积,以提高水下推土机对于稀软地质条件的适应性。相比船型履带板和平板型履带板,菱形履带板能够增加水下推土机接触水底的接触面积,同时不会积压泥土,减少了泥土在履带上的附着,降低了水下推土机的无效载荷。
59.一种实施方式中,液力推进机构,包括至少三个液力推进器。液力推进器的数量可以根据液力推进器的动力和水下推土机的质量来确定。液力推进器均匀设置在车架的外表面。
60.在一些实施方式中,车架为矩形,液力推进机构包括三个液力推进器,在矩形车架上以等腰三角形的形式排列设置。
61.在一些实施方式中,车架为矩形,液力推进机构包括四个液力推进器,分别设置在矩形车架的顶端的四个角位置。
62.液力推进器通过调整推进的方向和推进力来控制水下推土机的上浮和下沉,以及调整水下推土机的方向和姿态。
63.在一些实施方式中,每个液力推进器的推力大小和推进方向均可以独立调整,从而产生不同方向和不同大小的推力。
64.在水下推土机上浮时,液力推进器产生向上的推力,使推土机能够浮上水面。关于浮力调节,现有技术通常是通过吸气和排水来控制浮力,实际在水底时,控制吸气和排水受吸气量和排水量的限制,制造的浮力比较有限。且通过吸气和排水来控制浮力,不能有效准确控制机械在水中的位置。
65.在水下推土机下沉时,因为水体会对推土机产生浮力作用,所以液力推进器可以产生向下的推力,使水下推土机可以下沉到指定位置。另外,液力推进器产生向下的推力时,可以增加水下推土机对水底的摩擦力,有助于辅助履带驱动机构工作。
66.在水下推土机在水底移动时,履带驱动机构作用使推土机移动,当履带驱动机构产生的力不足时,液力推进器可以增加水下推土机向前或者向后的推力。
67.在需要水下推土机保持特定的平衡位置或者角度工作时,液力推进器可以产生需要的方向和大小的推力。例如水下推土机可以保持浮离水底的姿态进行推土作业。
68.推力大小和推进方向均可以独立调整的液力推进器,使水下推土机能够灵活应对水中不同的工作场景需求。
69.在一些实施方式中,液力推进器是螺旋桨式推进器。螺旋桨式推进器的桨叶转动
时,将水从桨叶的吸入面吸入,从排出面排出,利用水的反作用力推动水下推土机移动。螺旋桨式推进器构造简单,工作可靠,效率较高。
70.在一些实施方式中,液力推进器是喷水式推进器。喷水式推进器包括水泵、吸水管道和喷水管道组成,水泵自吸水管道吸进水流,从喷水管道高速喷出,获得水流的反作用力,推动水下推土机移动。喷水式推进器具有良好的浅水推进效率和操纵性能,环境适应性较好。
71.一种实施方式中,水下监测机构,包括:水下声呐、水下压力传感器和水下定位装置。
72.水下推土机所处的环境,通过设置在车架的前端的水下声呐监测水下推土机行进方向的地形地貌采集得到。水下工作环境较为复杂,无论是水下推土机的工作对象还是行进路线,都需要观察和测量,电磁波观测和光观测方法在水中的穿透能力有限,所以选择声呐。声呐能够有效的监测水下推土机行进方向的地形地貌和工作对象。
73.水下推土机的工作状态,通过设置在车架的水下压力传感器监测水下推土机的工作水深和设置在车架的水下定位装置监测水下推土机所处的地理位置及移动路径采集得到。
74.在一些实施方式中,水下监测机构,还包括:水下摄像头和水下灯。
75.水下摄像头可以更为具体的显示水下情况,水下灯可以为水下摄像头提供辅助照明。同时,水下灯可以为水下的工作人员提供照明。
76.一种实施方式中,液压动力站在水上工作,在一些实施方式中,设置于陆地,在一些实施方式中,设置于水面,具体位置可以根据水下推土机和液压动力站的位置远近进行选择。
77.液压动力站,通过驱动液压泵,以产生液压能,为水下推土机提供动力能源。例如液压泵通过电机或者内燃机驱动,从液压油箱中吸入油液,形成高压油排出,将机械能转换成液压能。液压泵的高压油输出端连接到油电复合脐带缆的高压油管道,将高压油输出到水下推土机的液压控制单元,液压控制单元负责液压动力的分配和控制。液压油经过推土铲调节油缸、履带驱动马达和液力推进器这些执行部件后再从液压控制单元返回,经油电复合脐带缆的回油管道会到液压动力站的油箱。
78.现有的动力提供方案,如果采用水下燃油动力源,则需要安装通往水面的换气管道,当水面环境恶劣时,换气管道进水可能导致发动机熄火,容易故障。如果采用远程供电的方式,给水下发动机提供高压电,则需要进行电气防护,复杂度较高且存在漏电风险,容易对人员造成伤害。
79.本公开采用液压动力源,安全性较好,不存在漏电风险,且能满足复杂环境下的防爆以及防火要求。尤其在类似矿井应急排水的工程任务中,防火防爆很重要。
80.一种实施方式中,液压控制系统,包括:液压阀。液压阀分别设置在液压控制系统和推土调节油缸、履带驱动马达、液力推进器的连接管道上。通过电子控制系统控制液压阀的开闭程度,从而控制流过液压阀的液压油流量。在一些实施方式中,液压阀是电磁阀。
81.液压控制系统和推土调节油缸、履带驱动马达、液力推进器分别连接,通过电子控制系统分别控制各自的液压阀,控制流过液压阀的液压油流量,为不同的器件提供不同的动力,从而控制推土作业,水下推土机的行进和水下推土机的上浮下沉。同时,分别使用独
立的液压阀,能有效避免单个机构故障对于其他机构的影响,有效降低水下推土机的故障率。
82.在一些实施方式中,水下监测机构,还包括:液压传感器,设置在液压控制系统,用于监测液压控制系统的液压油管路的液压压力。
83.一种实施方式中,遥控操作台,包括:工控机、显示屏和遥控手柄。工控机与电子控制系统连接。显示屏与工控机连接。遥控手柄与工控机连接。
84.在一些实施方式中,通过遥控手柄发出指令信息到工控机,工控机处理指令信息,并通过电子控制系统控制水下推土机作业。
85.在一些实施方式中,工控机接收电子控制系统传输的水下推土机的数据信息,例如水下监测机构得到包括水下推土机所处的环境和工作状态的数据信息,并将数据信息传输到电子控制系统,工控机接收电子控制系统传输的水下推土机的数据信息,并将数据信息显示在显示屏上。
86.一种实施方式下,遥控手柄,包括:第一遥控手柄和第二遥控手柄。第一遥控手柄,用于控制液力推进机构。第二遥控手柄,用于控制推土机构和履带驱动机构。
87.在一些实施方式中,操控手柄通过can总结接到工控机上。
88.图4为本说明书一个或多个实施例提供的水下推土机的线路连接结构示意图。
89.液压动力站,通过驱动液压泵,以产生液压能,为水下推土机提供动力能源。例如液压泵通过电机或者内燃机驱动,从液压油箱中吸入油液,形成高压油排出,将机械能转换成液压能。液压泵的高压油输出端连接到油电复合脐带缆的高压油管道,将高压油输出到水下推土机的液压控制单元。
90.液压控制单元负责液压动力的分配和控制。液压油经过推土铲调节油缸、履带驱动马达和液力推进器后再从液压控制单元返回,经油电复合脐带缆的回油管道会到液压动力站的油箱。
91.操作人员通过遥控手柄发出指令信息到工控机,工控机处理指令信息,并将指令信息传输到电子控制系统,电子控制系统控制液压控制系统,通过控制液压动力的分配,控制水下推土机的工作。
92.水下监测机构得到包括水下推土机所处的环境和工作状态的监测信息,并将监测信息传输到电子控制系统,工控机接收电子控制系统传输的水下推土机的监测信息,并将监测信息显示在显示屏上。
93.上述对本说明书特定实施例进行了描述。其它实施例在所附权利要求书的范围内。在一些情况下,在权利要求书中记载的动作或步骤可以按照不同于实施例中的顺序来执行并且仍然可以实现期望的结果。另外,在附图中描绘的过程不一定要求示出的特定顺序或者连续顺序才能实现期望的结果。在某些实施方式中,多任务处理和并行处理也是可以的或者可能是有利的。
94.为了描述的方便,描述以上装置时以功能分为各种模块分别描述。当然,在实施本说明书一个或多个实施例时可以把各模块的功能在同一个或多个软件和/或硬件中实现。
95.所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非旨在暗示本公开的范围(包括权利要求)被限于这些例子;在本公开的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如
上所述的本说明书一个或多个实施例的不同方面的许多其它变化,为了简明它们没有在细节中提供。
96.另外,为简化说明和讨论,并且为了不会使本说明书一个或多个实施例难以理解,在所提供的附图中可以示出或可以不示出与集成电路(ic)芯片和其它部件的公知的电源/接地连接。此外,可以以框图的形式示出装置,以便避免使本说明书一个或多个实施例难以理解,并且这也考虑了以下事实,即关于这些框图装置的实施方式的细节是高度取决于将要实施本说明书一个或多个实施例的平台的(即,这些细节应当完全处于本领域技术人员的理解范围内)。在阐述了具体细节(例如,电路)以描述本公开的示例性实施例的情况下,对本领域技术人员来说显而易见的是,可以在没有这些具体细节的情况下或者这些具体细节有变化的情况下实施本说明书一个或多个实施例。因此,这些描述应被认为是说明性的而不是限制性的。
97.尽管已经结合了本公开的具体实施例对本公开进行了描述,但是根据前面的描述,这些实施例的很多替换、修改和变型对本领域普通技术人员来说将是显而易见的。
98.本说明书一个或多个实施例旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本说明书一个或多个实施例的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本公开的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。