1.本发明涉及地理信息领域,尤其涉及一种连续立体空间下的传感器节点覆盖部署方法及系统。
背景技术:
2.水下空间是典型的连续立体空间,水深对溶解氧等水质变量有一定的影响。水质变化是一个连续的动态过程,如何对水质变量进行实时、精确、立体的测量是水质监测亟需解决的问题。常用的水质监测方法有遥感监测、监测站监测、人工测量等,但以上监测方法都难以获得不同深度的水质监测信息。水质监测传感网由许多部署在水里的传感器节点组成,协作执行水质监测任务,并通过单跳或多跳的方式进行数据传输。基于传感器网络的水质监测具有高效率、可持续监测的优势,但是目前对于水质监测传感网节点部署的研究主要是在二维平面上展开的,没有在垂直方向上考虑对监测区域的覆盖,对于一些与水深相关的水质变量,难以全方位、多层次地获取整个水域的监测信息。
3.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
4.本发明的主要目的在于,解决现有技术中,对于水质监测传感网节点部署的研究主要是在二维平面上展开的,没有在垂直方向上考虑对监测区域的覆盖,对于一些与水深相关的水质变量,难以全方位、多层次地获取整个水域的监测信息的技术问题。
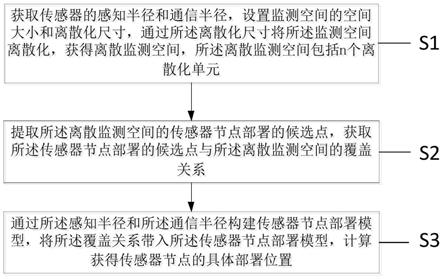
5.为实现上述目的,本发明提供一种连续立体空间下的传感器节点覆盖部署方法,包括:
6.s1:获取传感器的感知半径和通信半径,设置监测空间的空间大小和离散化尺寸,通过所述离散化尺寸将所述监测空间离散化,获得离散监测空间,所述离散监测空间包括n个离散化单元;
7.s2:提取所述离散监测空间的传感器节点部署的候选点,获取所述传感器节点部署的候选点与所述离散监测空间的覆盖关系;
8.s3:通过所述感知半径和所述通信半径构建传感器节点部署模型,将所述覆盖关系带入所述传感器节点部署模型,计算获得传感器节点的具体部署位置。
9.优选地,步骤s1具体为:
10.s11:根据监测任务需求,设置所述监测空间的空间大小,包括所述监测空间的长度、宽度和高度;
11.s12:设置所述监测空间的离散化尺寸,通过所述离散化尺寸将所述监测空间划分为n个所述离散化单元,获得所述离散监测空间;所述离散化尺寸需要保证所述感知半径能覆盖整个所述离散化单元。
12.优选地,步骤s2具体为:
13.s21:将每个所述离散化单元作为一个需求对象,提取各所述需求对象的8个顶点作为参考点;
14.s22:设置节点覆盖半径,以每个所述需求对象的8个所述参考点为球心,以所述节点覆盖半径为半径画出8个空间球体,8个所述空间球体的重叠部分为对应的所述需求对象的覆盖空间;
15.s23:将各所述需求对象的覆盖空间进行相交,获得等效覆盖空间,提取各所述等效覆盖空间的中心点作为所述传感器节点部署的候选点;
16.s24:获取所述覆盖关系,所述覆盖关系为一个二维数组,所述覆盖关系的行表示各所述传感器节点部署的候选点的序号,所述覆盖关系的列表示各所述离散化单元的序号;若所述离散化单元被所述传感器节点部署的候选点对应的等效覆盖空间覆盖,则所述离散化单元的覆盖关系标记为1,否则所述离散化单元的覆盖关系标记为0。
17.优选地,步骤s3具体为:
18.s31:构建所述传感器节点部署模型,表现为如下形式:
[0019][0020]
满足:满足:
[0021]
其中,z表示目标函数;i表示需求对象集合;i表示需求对象的序号;j表示传感器节点部署的候选点集合;j表示传感器节点部署的候选点的序号;d
j
表示在传感器节点部署的候选点j在通信半径内的集合;n
i
表示可以覆盖需求对象i在感知半径内的传感器节点部署的候选点集合;w
i
表示对象i的需求度;p表示要部署的传感器节点数量;y
i
对象i是否被覆盖,取值范围为0或1;x
j
侯选位置j是否部署传感器节点,取值范围为0或1;
[0022]
s32:通过计算从所述传感器节点部署的候选点中选出p个候选点作为传感器部署节点,获取各所述传感器部署节点在所述监测空间中的位置,获得所述传感器节点的具体部署位置。
[0023]
一种连续立体空间下的传感器节点覆盖部署系统,包括:
[0024]
离散监测空间构建模块,用于获取传感器的感知半径和通信半径,设置监测空间的空间大小和离散化尺寸,通过所述离散化尺寸将所述监测空间离散化,获得离散监测空间,所述离散监测空间包括n个离散化单元;
[0025]
部署候选点获取模块,用于提取所述离散监测空间的传感器节点部署的候选点,获取所述传感器节点部署的候选点与所述离散监测空间的覆盖关系;
[0026]
部署位置获取模块,用于通过所述感知半径和所述通信半径构建传感器节点部署模型,将所述覆盖关系带入所述传感器节点部署模型,计算获得传感器节点的具体部署位置。
[0027]
本发明具有以下有益效果:
[0028]
实现在连续立体空间中对传感器进行有效的部署。
附图说明
[0029]
图1为本发明实施例方法流程图;
[0030]
图2为本发明传感器节点部署的候选点选取图;
[0031]
图3为本发明传感器节点部署覆盖效果图;
[0032]
图4为本发明实施例系统结构图;
[0033]
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
[0034]
应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0035]
参照图1,传感网是地理信息实时动态获取的重要手段之一,传感器节点对监测区域的空间覆盖情况反映了传感器网络能否高效、准确的获取地理空间信息。节点部署是传感器网络的基本问题,需要根据实际的应用环境来进行传感器节点部署。
[0036]
连续立体空间中监测的需求和节点的侯选部署位置在空间中都是连续分布的,所以连续立体空间的节点部署问题可以视作连续空间的最大覆盖问题(maximal coverage location problem,mclp)。由于侯选位置分布的连续性,空间中存在无数的侯选点,若通过连续模型来求解是极其复杂的。通过有限控制集(finite dominating sets,fds)从连续的空间中提取出有限的节点侯选位置,再用易于高效求解的最大覆盖选址模型来确定最优的节点部署位置,这是解决mclp问题的有效方法。fds可以代表需求空间上无限多的侯选位置,目前覆盖问题中基于点的fds有圆交点集(circle intersection point set,cips)、基于面的fds有多边形交点集(polygon intersection point set,pips),这些二维的fds可以有效解决二维空间的最大覆盖选址问题。
[0037]
目前尚未有针对连续立体空间中最大覆盖选址问题的三维fds提出,在对二维fds进行拓展的基础上,本发明提供一种连续立体空间下的传感器节点覆盖部署方法,包括:
[0038]
s1:获取传感器的感知半径和通信半径,设置监测空间的空间大小和离散化尺寸,通过所述离散化尺寸将所述监测空间离散化,获得离散监测空间,所述离散监测空间包括n个离散化单元;优选地,感知半径设置为21m,通信半径设置为40m;
[0039]
s2:提取所述离散监测空间的传感器节点部署的候选点,获取所述传感器节点部署的候选点与所述离散监测空间的覆盖关系;
[0040]
s3:通过所述感知半径和所述通信半径构建传感器节点部署模型,将所述覆盖关系带入所述传感器节点部署模型,计算获得传感器节点的具体部署位置。
[0041]
本实施例中,步骤s1具体为:
[0042]
s11:根据监测任务需求,设置所述监测空间的空间大小,包括所述监测空间的长度、宽度和高度;优选地,将监测空间的空间大小设置为90m*90m*90m;
[0043]
s12:设置所述监测空间的离散化尺寸,通过所述离散化尺寸将所述监测空间划分为n个所述离散化单元,获得所述离散监测空间;所述离散化尺寸需要保证所述感知半径能覆盖整个所述离散化单元;优选地,将监测空间的离散化尺寸设置为10m*10m*10m,n为9*9*9;
[0044]
本实施例中,步骤s2具体为:
[0045]
s21:将每个所述离散化单元作为一个需求对象,提取各所述需求对象的8个顶点
作为参考点;
[0046]
s22:设置节点覆盖半径,以每个所述需求对象的8个所述参考点为球心,以所述节点覆盖半径为半径画出8个空间球体,8个所述空间球体的重叠部分为对应的所述需求对象的覆盖空间;
[0047]
s23:将各所述需求对象的覆盖空间进行相交,获得等效覆盖空间,提取各所述等效覆盖空间的中心点作为所述传感器节点部署的候选点;
[0048]
如果某一个传感器节点部署的候选点可以覆盖的需求对象也被其它的传感器节点部署的候选点覆盖,甚至其他传感器节点部署的候选点覆盖的需求对象更多,则称该传感器节点部署的候选点为受控点,可以将受控点去除;例如:参考图2,得到的初始传感器节点部署的候选点共21530个,执行去除受控点操作,最终得到的传感器节点部署的候选点为2863个;
[0049]
s24:获取所述覆盖关系,所述覆盖关系为一个二维数组,所述覆盖关系的行表示各所述传感器节点部署的候选点的序号,所述覆盖关系的列表示各所述离散化单元的序号;若所述离散化单元被所述传感器节点部署的候选点对应的等效覆盖空间覆盖,则所述离散化单元的覆盖关系标记为1,否则所述离散化单元的覆盖关系标记为0;
[0050]
本实施例中,步骤s3具体为:
[0051]
s31:构建所述传感器节点部署模型,表现为如下形式:
[0052][0053]
满足:满足:
[0054]
其中,z表示目标函数;i表示需求对象集合;i表示需求对象的序号;j表示传感器节点部署的候选点集合;j表示传感器节点部署的候选点的序号;d
j
表示在传感器节点部署的候选点j在通信半径内的集合;n
i
表示可以覆盖需求对象i在感知半径内的传感器节点部署的候选点集合;w
i
表示对象i的需求度;p表示要部署的传感器节点数量;y
i
对象i是否被覆盖,取值范围为0或1;x
j
侯选位置j是否部署传感器节点,取值范围为0或1;
[0055]
s32:通过计算从所述传感器节点部署的候选点中选出p个候选点作为传感器部署节点,获取各所述传感器部署节点在所述监测空间中的位置,获得所述传感器节点的具体部署位置;
[0056]
具体实现中,以部署15个传感器节点的具体部署位置为例,如表1所示;部署不同数量的传感器节点时,对应的模型覆盖度和实际空间覆盖度如表2所示;部分传感器节点部署效果如图3所示;
[0057]
表1p=15时的节点部署方案
[0058][0059]
表2部署不同数量节点对应的覆盖度
[0060][0061]
参考图4,本发明提供一种连续立体空间下的传感器节点覆盖部署系统,包括:
[0062]
离散监测空间构建模块10,用于获取传感器的感知半径和通信半径,设置监测空间的空间大小和离散化尺寸,通过所述离散化尺寸将所述监测空间离散化,获得离散监测空间,所述离散监测空间包括n个离散化单元;
[0063]
部署候选点获取模块20,用于提取所述离散监测空间的传感器节点部署的候选点,获取所述传感器节点部署的候选点与所述离散监测空间的覆盖关系;
[0064]
部署位置获取模块30,用于通过所述感知半径和所述通信半径构建传感器节点部
署模型,将所述覆盖关系带入所述传感器节点部署模型,计算获得传感器节点的具体部署位置。
[0065]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
[0066]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。词语第一、第二、以及第三等的使用不表示任何顺序,可将这些词语解释为标识。
[0067]
以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。