1.本发明涉及清洗技术领域,具体涉及一种基于工业机器人的清洗装置及其清洗方法。
背景技术:
2.地面覆盖薄膜用于对地面上种植的农作物的覆盖,近年来,随着农业的发展,覆膜技术已大面积的推广应用,大幅度的提高农作为的产量,对发展农作物的生产以及推动农村经济的可持续发展起到了积极的作用。
3.但是随着对地面覆膜的广泛使用,也使得地面覆膜大量的残留在土地里,严重影响土地的质量,更加的危害了农作物的正常生长,并进一步的造成土地的减产现象,从而影响农业更重的环境,因此废旧地膜的清洗是进行回收再利用的一个重要的环节,目前对废旧地膜的清洗装置是将废旧地膜放置在其中,然后清洗完毕之后再拿出,但是拿出的过程会洒出很多的水,导致水资源的浪费,而且还需要搬运至下一个工位压缩水分,难免会增加清洗时间,导致清洗的效率降低。
4.因此,目前需要一种可以实现快速去除水分、又可以减少清洗时间的清洗装置,来解决以上存在的问题。
技术实现要素:
5.发明目的:本发明提供一种基于工业机器人的清洗装置,并进一步提供一种基于上述清洗装置的清洗方法,来解决现有技术存在的上述问题。
6.技术方案:一种基于工业机器人的清洗装置,包括基础组件、挤压组件和闭合组件三部分组成。
7.其中,基础组件包括清洗筒,支撑所述清洗筒的支撑架,设置在支撑架一端的第一动力模块,以及连接所述第一动力模块、且贯穿所述清洗筒中心的滚动轴,以及设置在清洗筒下的排水箱;挤压组件包括设置在所述清洗筒上的第二动力模块,与所述第二动力模块连接、且设置在所述清洗筒侧端的压缩机构,以及与所述压缩机构呈对称设置、且在所述清洗筒内进行上下运动的第一挤压件和第二挤压件;闭合组件包括第一闭合机构和第二闭合机构,用于控制清洗筒的闭合和打开。
8.在进一步的实施例中,所述压缩机构水平镜像对称为2组,分别设置在所述清洗筒的两侧,第二动力模块带动与之连接的压缩机构进行运动,压缩机构带动第一挤压板和第二挤压板同时向滚动轴进行运动,进而实现对清洗工件的水分压缩,进一步的节省压缩时间,提高清洗的效率。
9.在进一步的实施例中,所述压缩机构包括保护装置,所述保护装置至少设置为2个,分别对称设置在清洗筒两侧;以及贯穿保护装置的移动轴,所述移动轴至少设置为4个,分别设置在所述保护装置上下两侧、且与所述第一挤压件和第二挤压件固定连接,以及设
置在保护装置内部的转动机构,分别与所述移动轴进行连接,移动轴通过转动机构在保护装置内进行上下移动,进而实现第一挤压进和第二挤压件进行同时进行上下移动,用于带动所述移动轴同步进行相向或背离运动,实现所述第一挤压件和第二挤压件进行挤压或释放,进一步的提高压缩效率,节省水分压缩的时间。
10.在进一步的实施例中,所述转动机构包括支撑板,所述固定设置在所述保护装置内;以及转动设置在所述支撑板前面、且上下连接分别固定连接所述移动轴的移动板;以及转动连接在所述移动板和支撑板之间的转动件,用于支撑所述移动板同时拉动所述移动轴进行相向或是背离运动。
11.在进一步的实施例中,所述滚动轴贯穿所述压缩机构,与所述清洗筒共同作用,用于对清洗件进行工件的滚动清洗,为了不影响滚动轴对工件的清洗,在保护装置上设置为和滚动轴相配合的圆孔,使得滚动轴贯穿其中,减少清洗装置的空间占用,提高清洗效率。
12.在进一步的实施例中,所述清洗筒包括:第一闭合门,设置在清洗筒的前端,用于控制清洗件的进入;第二闭合门,设置在清洗筒的后端,用于控制清洗件的释放,第一闭合门和第二闭合门的设计,进一步提高清洗装置的智能化,进一步的减少人工的参与,节省清洗时间。
13.在进一步的实施例中,所述第一闭合门和第二闭合门上设置有环形凹槽,用于所述闭合组件控制其进行打开或闭合,实现清洗装置的智能化。
14.在进一步的实施例中,所述第一闭合机构和第二闭合机构结构相同,包括第三动力模块,设置为2组,分别固定设置在所述支撑架上;运动件,至少设置为2个,分别设置在所述环形凹槽中,第三动力模块带动运动件在环形凹槽中进行移动,进而控制所述第一闭合门和第二闭合门的打开或是闭合,实现清洗件的进入和释放,节省人工参与,节省清洗成本。
15.在进一步的实施例中,所述清洗还包括传送机构,当压缩水分后的清洗件从第二闭合门释放后,直接将其放置在传动机构上,在传送机构的带动下将其运送至下一个加工工位,实现清洗装置的智能化,进一步节省清洗时间,减少清洗成本。
16.在进一步的实施例中,具体包括以下步骤:s1、在清洗筒内注入预设水量后,第三动力模块控制第一闭合机构沿着第一闭合门上的环形凹槽进行运动,进而将第一闭合门打开,将待清洗工件放置在清洗筒内,关闭第一闭合机构后,然后控制第一动力模块运动,进而带动与之转动连接的滚动轴进行转动,然后对待清洗件进行清洗;s2、清洗完成之后,控制2个第二动力模块分别带动与之连接的移动轴进行向下移动,上移动轴的运动进而带动与之通过转动机构连接的下移动轴进行向上运动,上移动轴和下移动轴分别同时向滚动轴方向运动,进而带动分别与其固定连接的第一挤压件和第二挤压件同时向滚动轴方向进行运动,进而实现对清洗件进行水分的压缩,压缩完毕之后,然后第二动力模块反转,进而带动与之连接的移动轴向上运动,进而带动通过转动机构连接的下移动轴向下运动,进而带动分别与其连接的第一挤压件和第二挤压件沿着滚动轴背离方向运动,进而实现对被挤压的清洗物进行释放;s3、第三动力模块控制第二闭合机构沿着第二闭合门上的环形凹槽进行运动,进
而实现第二闭合门的打开,然后被清洗压缩水分后的工件被释放在传送机构上,在传送机构的带动下,将清洗好的工件运送至下一个加工工位处;s4、重复步骤s1至s3,直到系统结束工作。
17.有益效果:本发明提供一种基于工业机器人的清洗装置及其清洗方法,包括基础组件、挤压组件和闭合组件三部分组成,通过第一动力模块带动滚动轴在清洗筒中进行滚动,实现对清洗件的快速清洗,然后通过清洗筒下的排水箱将污水排送至预设的区域,实现污水的再次处理利用,节省水资源;挤压组件中的第二动力模块带动移动轴,通过转动机构带动固定设置在移动轴的2个挤压板进行同步向滚动轴进行挤压运动,实现对清洗后的工件进行水分压缩,进一步的减少将其再次搬运至水分处理工位的时间,通过闭合组件的设计,自动的进行闭合门的打开与关闭,实现清洗件的进入和释放,进一步的保证清洗效率,本发明设计的清洗装置解决了现有技术中浪费水资源、以及清洗之后压缩水分时间的浪费问题,大大的提高清洗效率,节省清洗成本。
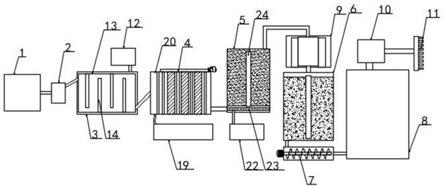
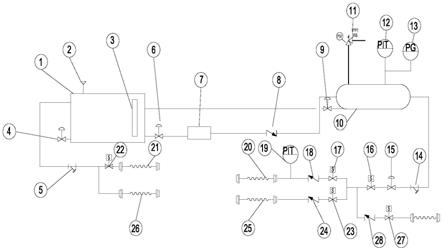
18.说明书附图图1为本发明总体结构装配示意图;图2为本发明第一闭合机构位置结构示意图;图3为本发明第二闭合机构位置结构示意图;图4为本发明挤压组件结构示意图;图5为本发明压缩机构结构示意图;图6为本发明转动机构结构示意图。
19.图中各附图标记为:第一电机1、压缩机构2、清洗筒3、第二闭合门3a、第一闭合门3b、清洗筒上壁3c、第一挤压件3d、第二挤压件3e、清洗筒下壁3f、滚动轴3g、第二电机4、上移动轴4a、下移动轴4b、支撑板4c、移动板4d、转动件4e、保护装置4f、闭合机构5、第一气缸5a、第二气缸5b、第一运动件5c、第二运动件5d、排水箱6、支撑架7、传送机构8、排水管8a。
具体实施方式
20.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
21.申请人认为,目前的对地面覆盖膜的清洗装置,在清洗完成之后不能及时的将覆盖膜上的水分进行清洗,还需要将其运输至下一个工位进行压缩才可以将水分清除掉,不仅会增加清洗的时间,而且在搬运的过程中容易造成水分的浪费,严重影响清洗效率。
22.为此,申请人设计一种基于工业机器人的清洗装置及其清洗方法,由基础组件进行对地面覆盖膜进行清洗,挤压组件对清洗后的覆盖膜进行压缩,快速的将覆盖膜之间的水分挤压掉,进一步节省清洗时间,提高清洗效率。
23.在实际应用中,如图1至图6所示,本发明提供一种基于工业机器人的清洗装置,包括基础组件、挤压组件和闭合组件三部分组成,其中基础组件包括清洗筒3,用于支撑清洗筒3的支撑架7,设置在支撑架7一端的第一动力模块,本实施例中的第一动力模块为第一电机1,以及与第一电机1转动连接、且贯穿清洗筒3的滚动轴3g,用于对地面覆盖膜进行清洗,
以及设置在清洗筒3下面的排水箱6,挤压组件包括固定设置在清洗筒3上壁上的第二电机4,与第二电机4连接、且设置在清洗筒3内侧壁上的压缩机构2,以及与所述设置在压缩机构2上下对称设置、且在所述清洗筒3内进行上下运动的第一挤压件3d和第二挤压件3e,用于对清洗后的覆盖膜进行压缩水分,闭合组件包括第一闭合机构5和第二闭合机构5,用于控制清洗筒3的打开和关闭,以及控制覆盖膜的进入和放出。
24.通过上述的第一闭合机构5控制清洗筒3的打开,待清洗的覆盖膜由此进入到清洗筒3内,加入预设的水量之后,第一电机1带动滚动轴3g在清洗筒3中进行转动,对覆盖膜进行清洗,当清洗完成之后启动第二电机4进行运动,进而带动与之连接的压缩机构2带动第一挤压件3d和第二挤压件3e同时向滚动轴3g方向运动,实现对覆盖膜的挤压,进而使得覆盖膜的水分被压缩,完成水分的压缩之后,控制第二闭合机构5打开,被清洗压缩后的覆盖膜被释放出来,进行下个工位的加工,清洗后的污水被排送至排水箱6中,然后引入到污水处理区;进一步的解决了压缩水分造成的时间浪费问题,以及通过排水箱6的设计,大大的节省水资源,实现了水资源再次利用,进一步的提高清洗效率。
25.为了保证对清洗的覆盖膜进行水分压缩的稳定性,压缩机构2水平镜像设置为2组,分别设置在清洗筒3的内侧壁上,当对覆盖膜进行水分挤压时,2个对称的第二电机4同时进行运动,同时带动与其连接的两个压缩机构2带动第一挤压件3d和第二挤压件3e同时向滚动轴3g挤压,进一步的提高第一挤压件3d和第二挤压件3e运动的稳定性,提高挤压的质量,节省对覆盖膜水分挤压的时间,提高挤压的效率。
26.为了解决挤压件的同步运动,节省挤压的时间,压缩机构2包括设置在清洗筒3内侧壁上的2个保护装置4f,以及分别设置在2个保护装置4f上面的2个上移动轴4a,分别设置在2个保护装置4f下面的下移动轴4b,以及分别设置在保护装置4f内部的转动机构,其中转动机构包括设置在保护装置4f内部的支撑板4c,转动设置在支撑板4c前面的移动板4d,以及转动设置在支撑板4c和移动板4d之间的转动件4e,在进行覆盖膜水分压缩时,2个第二电机4分别带动上移动轴4a向下运动,上移动轴4a的运动通过转动件4e中的移动板4d在转动件4e的作用下,进行向上转动,转动件4e的向上转动进而带动与之连接的下移动轴4b向上运动,进而同时带动与上移动轴4a和下移动轴4b固定连接的第一挤压板和第二挤压板同时向滚轴轴方向运动,解决了单侧挤压水分效率不高的问题,两侧挤压板同时运动,进一步的节省压缩时间,且提高压缩的效率。
27.为了减少对覆盖膜的清洗时间、以及减少人工参与,在清洗筒3的前后端分别设置第一闭合门3b和第二闭合门3a,第一闭合门3b和第二闭合门3a的两端分别设置有环形凹槽,以及在第一闭合门3b和第二闭合门3a处分别设置有与之匹配的第一闭合机构5和第二闭合机构5,其中第一闭合机构5和第二闭合机构5的结构相同,包括第一气缸5a,以及与第一气缸5a连接、且围绕第一闭合门3b上的环形凹槽进行运动的第一运动件5c,第二气缸5b,以及与第二气缸5b连接、且围绕第二闭合门3a上的环形凹槽进行运动的第二运动件5d,将待清洗的地面覆盖膜放入清洗筒3内时,启动第一气缸5a带动第一运动件5c围绕第一闭合门3b上的环形凹槽进行运动,实现第一闭合门3b的打开,等放置完毕之后,将第一闭合门3b进行关闭,等到预设的清洗时间完成之后,第二气缸5b带动与之连接的第二运动件5d沿着第二闭合门3a上的环形凹槽进行运动,进而将清洗完成的覆盖膜进行释放,进一步提高清洗的效率,节省清洗时间,大大的节省人工成本。
28.为了实现清洗的智能化,进一步的减少人工成本,在清洗装置的第二闭合下面设置传送机构8,当清洗压缩之后的地面覆盖膜从第二闭合门3a下面被释放出来时,直接被放置在传送线上,然后通过传送线移送到下一个加工工位,进一步减少再次搬运到下一个加工工位的时间,大大的提高清洗效率,实现清洗装置的智能化。
29.在上述的清洗装置基础之上,本发明提出一种清洗装置的清洗方法,具体步骤如下:首先,在清洗筒3内注入预设水量后,第三动力模块控制第一闭合机构5沿着第一闭合门3b上的环形凹槽进行运动,进而将第一闭合门3b打开,将待清洗工件放置在清洗筒3内,关闭第一闭合机构5后,然后控制第一动力模块运动,进而带动与之转动连接的滚动轴3g进行转动,然后对待清洗件进行清洗;接着,清洗完成之后,控制2个第二动力模块分别带动与之连接的移动轴进行向下移动,上移动轴4a的运动进而带动与之通过转动机构连接的下移动轴4b进行向上运动,上移动轴4a和下移动轴4b分别同时向滚动轴3g方向运动,进而带动分别与其固定连接的第一挤压件3d和第二挤压件3e同时向滚动轴3g方向进行运动,进而实现对清洗件进行水分的压缩,压缩完毕之后,然后第二动力模块反转,进而带动与之连接的移动轴向上运动,进而带动通过转动机构连接的下移动轴4b向下运动,进而带动分别与其连接的第一挤压件3d和第二挤压件3e沿着滚动轴3g背离方向运动,进而实现对被挤压的清洗物进行释放;然后,第三动力模块控制第二闭合机构5沿着第二闭合门3a上的环形凹槽进行运动,进而实现第二闭合门3a的打开,然后被清洗压缩水分后的工件被释放在传送机构8上,在传送机构8的带动下,将清洗好的工件运送至下一个加工工位处;最后,重复步骤s1至s3,直到系统结束工作。如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。