1.本发明涉及天地盒加工技术领域,具体涉及一种天地盒的自动化组装设备。
背景技术:
2.天地盒由天盒和地盒组成。天盒与地盒经过纸板折叠、涂胶等工序成型后,一般会将天盒与地盒组合后形成一个天地盒,再将天地盒统一储存放置。现有技术的组合手段,通常是采用人工组合,组合效率较低。
技术实现要素:
3.针对以上问题,本发明提供一种天地盒的自动化组装设备,能够自动组装天盒与地盒,无需人工操作,组装准确度高,组装效率高。
4.为实现上述目的,本发明通过以下技术方案来解决:一种天地盒的自动化组装设备,包括机箱,所述机箱上设有输送道,所述输送道上依次设有测距感应模块、天地盒翻转模块、天盒下料模块,所述天地盒翻转模块与所述天盒下料模块上侧设有天盒输送模块;所述测距感应模块包括第一龙门架、固定在所述第一龙门架上的测距感应器;所述天地盒翻转模块包括固定在所述机箱外侧的两个侧板、固定在所述侧板上且沿z轴方向驱动的第一升降组件、连接在所述第一升降组件输出端的载板、固定在所述载板上且沿y轴方向驱动的第一气缸、连接在所述第一气缸输出端的u形板、固定在所述u形板上的第一电机、连接在所述第一电机输出端的第一安装板、固定在所述第一安装板上的若干第一真空吸盘;所述天盒下料模块包括固定在所述机箱上端的外框、位于所述外框两侧的多个分隔阀门组件;所述天盒输送模块包括固定在两个所述侧板上的第二龙门架、固定在所述外框与所述第二龙门架之间的第三龙门架、设置在所述第三龙门架上且沿x轴方向驱动的平移组件、连接在所述平移组件输出端的竖板、固定在所述竖板上且沿z轴方向驱动的第二升降组件、连接在所述第二升降组件输出端的第二安装板、固定在所述第二安装板上的若干第二真空吸盘。
5.具体的,所述第一升降组件包括第二电机、连接在所述第二电机输出端的第一丝杆、与所述第一丝杆相配合的第一螺纹轴套,所述第一螺纹轴套为所述第一升降组件的输出端。
6.具体的,所述分隔阀门组件包括固定在所述外框一侧且沿y轴方向驱动的第二气缸、连接在所述第二气缸输出端的延伸杆、连接在所述延伸杆一端的垫板,所述外框两侧均设有供所述垫板活动的矩形孔。
7.具体的,所述平移组件包括第三电机、连接在所述第三电机输出端的第二丝杆、与所述第二丝杆相配合的第二螺纹轴套,所述第二螺纹轴套为所述平移组件的输出端。
8.具体的,所述第二升降组件包括第四电机、连接在所述第四电机输出端的第三丝杆、与所述第三丝杆相配合的第三螺纹轴套,所述第三螺纹轴套为所述第二升降组件的输出端。
9.本发明的有益效果是:本发明的天地盒的自动化组装设备,利用测距感应器对输送道上的正放天盒、反放天盒、正放地盒、反放地盒进行测距,以识别天盒或地盒、正放或反放,还设有天地盒翻转模块,能够根据测距结果将反放天盒、反放地盒自动翻转180
°
,并设有天盒输送模块、天盒下料模块,能够根据测距结构将正放天盒以及经过翻转后的反放天盒输送至天盒下料模块中,后续将天盒自动下料,使其与地盒组合,整个过程无需人工操作,组装准确度高,组装效率高。
附图说明
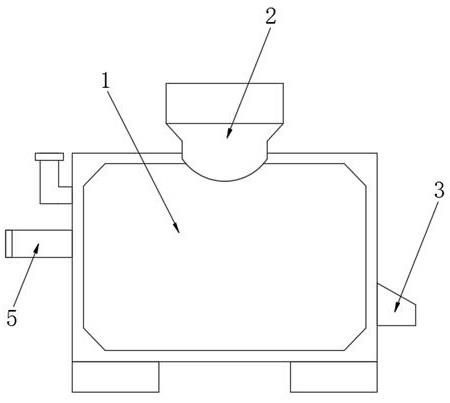
10.图1为本发明的一种天地盒的自动化组装设备的立体结构示意图。
11.图2为本发明的一种天地盒的自动化组装设备的俯视图。
12.图3为图2中a
‑
a面的剖面图。
13.图4为图2中b
‑
b面的剖面图。
14.图5为图2中c
‑
c面的剖面图。
15.图6为测距感应器分别对天盒正放、天盒反放、地盒正放、地盒反放四种状态下测试出间距d、e、f、g的示意图。
16.附图标记为:机箱1、输送道2、测距感应模块3、第一龙门架31、测距感应器32、天地盒翻转模块4、侧板41、第一升降组件42、第二电机421、第一丝杆422、第一螺纹轴套423、载板43、第一气缸44、u形板45、第一电机46、第一安装板47、第一真空吸盘48、天盒下料模块5、外框51、分隔阀门组件52、第二气缸521、延伸杆522、垫板523、天盒输送模块6、第二龙门架61、第三龙门架62、平移组件63、第三电机631、第二丝杆632、第二螺纹轴套633、竖板64、第二升降组件65、第四电机651、第三丝杆652、第三螺纹轴套653、第二安装板66、第二真空吸盘67、天盒7、地盒8。
具体实施方式
17.下面结合实施例和附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
18.如图1~6所示:一种天地盒的自动化组装设备,包括机箱1,机箱1上设有输送道2,输送道2上依次设有测距感应模块3、天地盒翻转模块4、天盒下料模块5,天地盒翻转模块4与天盒下料模块5上侧设有天盒输送模块6;测距感应模块3包括第一龙门架31、固定在第一龙门架31上的测距感应器32;天地盒翻转模块4包括固定在机箱1外侧的两个侧板41、固定在侧板41上且沿z轴方向驱动的第一升降组件42、连接在第一升降组件42输出端的载板43、固定在载板43上且沿y轴方向驱动的第一气缸44、连接在第一气缸44输出端的u形板45、固定在u形板45上的第一电机46、连接在第一电机46输出端的第一安装板47、固定在第一安装板47上的若干第一
真空吸盘48,第一真空吸盘48上端连接有第一导气管,第一导气管一端连接在真空装置的抽气口上,通过抽真空的作用使第一真空吸盘48吸附抓取天盒7或地盒8两侧面;天盒下料模块5包括固定在机箱1上端的外框51、位于外框51两侧的多个分隔阀门组件52;天盒输送模块6包括固定在两个侧板41上的第二龙门架61、固定在外框51与第二龙门架61之间的第三龙门架62、设置在第三龙门架62上且沿x轴方向驱动的平移组件63、连接在平移组件63输出端的竖板64、固定在竖板64上且沿z轴方向驱动的第二升降组件65、连接在第二升降组件65输出端的第二安装板66、固定在第二安装板66上的若干第二真空吸盘67,第二真空吸盘67上端连接有第二导气管,第二导气管一端连接在真空装置的抽气口上,通过抽真空的作用使第二真空吸盘67吸附抓取天盒7上端面。
19.优选的,第一升降组件42包括第二电机421、连接在第二电机421输出端的第一丝杆422、与第一丝杆422相配合的第一螺纹轴套423,第一螺纹轴套423为第一升降组件42的输出端。
20.优选的,分隔阀门组件52用于对天盒7进行分隔储存,分隔阀门组件52包括固定在外框51一侧且沿y轴方向驱动的第二气缸521、连接在第二气缸521输出端的延伸杆522、连接在延伸杆522一端的垫板523,垫板523用于阻挡天盒7,若天盒7需要掉落至下一级储存区域或输送道2上,则可控制该位置的第二气缸521启动,将垫板523从外框51的内腔中抽出,天盒7底部无支撑则掉落至下一级储存区域或输送道2上,外框51两侧均设有供垫板523活动的矩形孔。
21.优选的,平移组件63包括第三电机631、连接在第三电机631输出端的第二丝杆632、与第二丝杆632相配合的第二螺纹轴套633,第二螺纹轴套633为平移组件63的输出端。
22.优选的,第二升降组件65包括第四电机651、连接在第四电机651输出端的第三丝杆652、与第三丝杆652相配合的第三螺纹轴套653,第三螺纹轴套653为第二升降组件65的输出端。
23.具体操作如下:数量以及排序不一的正放的天盒7、反放的天盒7、正放的地盒8、反放的地盒8均由输送道2输送进料;当天盒7、地盒8输送至测距感应器32下方,测距感应器32对天盒7、地盒8进行测距;其中:测距感应器32对正放的地盒8测试出间距为d;测距感应器32对反放的地盒8测试出间距为e;测距感应器32对正放的天盒7测试出间距为f;测距感应器32对反放的天盒7测试出间距为g,并记录信息至控制系统中;若测距感应器32测试出间距为d,则判断为正放的地盒8,将由输送道2继续输送至天盒下料模块5下方,天盒下料模块5将外框51内侧存放在最底部储存区域的天盒7放出,天盒7盖在地盒8上,完成组合;若测距感应器32测试出间距为e,则判断为反放的地盒8,将由输送道2继续输送至天地盒翻转模块4下方,由天地盒翻转模块4对地盒8翻转180
°
后,再将地盒8重新放至输送道2上,由输送道2继续输送至天盒下料模块5下方,天盒下料模块5将外框51内侧存放在最底部储存区域的天盒7放出,天盒7盖在地盒8上,完成组合;若测距感应器32测试出间距为f,则判断为正放的天盒7,将由输送道2继续输送至
天地盒翻转模块4下方,由天盒输送模块6吸附抓取、上升、平移后放置在天盒下料模块5内储存;若测距感应器32测试出间距为g,则判断为反放的天盒7,将由输送道2继续输送至天地盒翻转模块4下方,由天地盒翻转模块4对天盒7翻转180
°
后,再由天盒输送模块6吸附抓取、上升、平移后放置在天盒下料模块5内储存。
24.以上实施例仅表达了本发明的1种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。