技术特征:
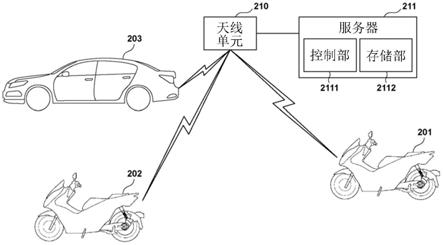
1.一种交叉路口分区同步通行控制系统,其特征在于,包括车载控制系统、地面控制系统和云端控制系统(11);所述车载控制系统包括车载信息收集模块、车载信号发射接收器(9)和自动驾驶控制平台(8),所述车载信息收集模块用于收集车辆附近其他车辆的实时信息,所述车载信号发射接收器(9)用于接收车辆附近其他车辆的实时信息,并传送给所述地面控制系统,所述自动驾驶控制平台(8)用于控制车辆行驶;所述地面控制系统包括信号灯系统、车辆识别系统和路口通信总模块(5),所述信号灯系统用于通过信号灯控制车辆和行人通过的时间,所述车辆识别系统用于识别车辆信息,所述路口通信总模块(5)用于接收所述车载信号发射接收器(9)和所述车辆识别系统所发送的信息,并传送给所述云端控制系统(11);所述云端控制系统(11)用于根据接收到的信息进行计算,将车辆行驶的区域划分成通行区(15)、缓冲区(16)和等候区(17),同时向所述地面控制系统和所述车载控制系统发出控制指令。2.根据权利要求1所述的一种交叉路口分区同步通行控制系统,其特征在于,所述车载信息收集模块包括车载视觉模块(6)和车载测距模块(7),所述车载视觉模块(6)和所述车载测距模块(7)均安装在车辆的前方,所述车载视觉模块(6)用于监控车辆附近其他车辆号牌信息和车辆指示灯信息,所述车载测距模块(7)用于测量本车与前方和侧方车辆间距离。3.根据权利要求1所述的一种交叉路口分区同步通行控制系统,其特征在于,所述车载控制系统还包括中控面板(10),所述中控面板(10)设置于车辆内部的前方,所述中控面板(10)用于显示车载信息收集模块所检测到的车辆附近其他车辆的实时信息,并将所述云端控制系统(11)的控制指令传递给驾驶员(18)。4.根据权利要求1所述的一种交叉路口分区同步通行控制系统,其特征在于,所述信号灯控制系统包括道路信号灯(1)和斑马线信号灯(2),所述道路信号灯(1)设置于路口处,所述斑马线信号灯(2)设置于斑马线两端,所述道路信号灯(1)根据所述云端控制系统(11)的控制指令调节颜色和时间以此来调节车辆通行时间,所述斑马线信号灯(2)根据所述云端控制系统(11)的控制指令调节颜色和时间以此来调节行人通行时间。5.根据权利要求1所述的一种交叉路口分区同步通行控制系统,其特征在于,所述车辆识别系统包括通行区摄像头(3
‑
1)、缓冲区摄像头(3
‑
2)、等候区摄像头(3
‑
3)和闪光灯(4),所述通行区摄像头(3
‑
1)与所述闪光灯(4)均设置于路口处,所述缓冲区摄像头(3
‑
2)设置于所述缓冲区(16)的两侧,所述等候区摄像头(3
‑
3)设置于所述等候区(17)的两侧,所述通行区摄像头(3
‑
1)用于实时定位所述通行区(15)内的车辆位置、识别车辆号牌信息、车长信息、车辆运行速度和车队长度,所述缓冲区摄像头(3
‑
2)用于实时定位所述缓冲区(16)内的车辆位置、识别车辆号牌信息、车长信息、车辆运行速度和车队长度,所述等候区摄像头(3
‑
3)用于实时定位所述等候区(17)内的车辆位置、识别车辆号牌信息、车长信息、车辆运行速度和车队长度,所述闪光灯(4)用于辅助所述通行区摄像头(3
‑
1)、缓冲区摄像头(3
‑
2)和等候区摄像头(3
‑
3)夜间拍摄。6.根据权利要求1所述的一种交叉路口分区同步通行系统,其特征在于,所述地面控制系统还包括行人识别传感器(12)、围栏信号接收器(13)和隔离护栏(14),所述行人识别传感器(12)、围栏信号接收器(13)和隔离护栏(14)均设置于斑马线两端,所述行人识别传感
器(12)用于检测斑马线上有无行人,所述围栏信号接收器(13)用于接收所述云端控制系统(11)的控制指令,并控制所述隔离护栏(14)关闭以隔离行人。7.一种交叉路口分区同步通行控制方法,其特征在于,包括如下步骤:s1.所述车载控制系统和车辆识别系统识别和收集信息,并将信息传送给所述路口通信总模块(5);s2.所述路口通信总模块(5)将接收到的来自所述车载控制系统和车辆识别系统的信息传送给所述云端控制系统(11);s3.所述云端控制系统(11)接收到信息并进行计算后,将车辆行驶区域划分成所述通行区(15)、缓冲区(16)和等候区(17),同时向所述信号灯系统下达控制指令,调整所述道路信号灯(1)和斑马线信号灯(2)的时间与颜色,并向所述通行区(15)的车辆下达启动指令,向所述缓冲区(16)的车辆下达前进指令,向所述等待区(17)的车辆下达减速行驶指令。8.根据权利要求7所述的一种交叉路口分区同步通行控制方法,其特征在于,所述步骤s3中,所述通行区(15)为所述云端控制系统(11)根据所述通行区摄像头(3
‑
1)和缓冲区摄像头(3
‑
2)所检测的车辆间距和速度的信息而划分的区域,所述通行区(15)内的车辆已经完成变道和间距的调整且随时等待起步,所述通行区(15)区域大小根据路口内车辆拥堵情况实时改变,在信号灯倒计时结束时,所述缓冲区(16)的车辆经加速、减速补充至前一所述通行区(15),所述云端控制系统(11)将车队内最后一台停止车辆所在位置划为新一轮的所述通行区(15);所述缓冲区(16)为所述云端控制系统(11)根据所述缓冲区摄像头(3
‑
2)所检测的车辆间距和速度的信息而划分的区域,所述缓冲区(16)区域大小根据路口内车辆拥堵情况实时改变,所述缓冲区(16)内车辆处于停止或蠕动状态,所述云端控制系统(11)根据不同路口情况设定不同的车辆蠕动速度v
r
,车辆速度在0
‑
v
r
内的所有车辆均划分为新一轮的所述缓冲区(16);所述等候区(17)为车辆即将进入交叉路口的区域,所述等候区(17)通过所述等候区摄像头(3
‑
3)判断车队长度、车队行驶速度和车流量信息,所述等候区(17)区域大小根据路口内车辆拥堵情况实时改变,所述等候区(17)内车辆处于蠕动或低速慢行状态,所述云端控制系统(11)将速度大于所述车辆蠕动速度v
r
车队的后部车辆划分为新一轮的所述等候区(17)。9.根据权利要求7所述的一种交叉路口分区同步通行控制方法,其特征在于,所述步骤s3中,所述云端控制系统(11)根据接收的信息为所述通行区(15)的车辆设定起步速度v1,通行速度v1,经计算所述通行区(15)长度和通行速度v1确定新一轮所述道路信号灯(1)的持续时间t1,同时将起步速度v1和通行速度v1等驾驶参数信息下达给所述自动驾驶系统(8),且实时显示在所述中控面板(10)上,并通过语音提示驾驶员(18)下一步操作情况;所述云端控制系统(11)根据所述缓冲区(16)的车队长度和所述通行区(15)的车队长度,对所述缓冲区(16)内已经停止的车辆下达起步速度v2、加速时间t2、缓冲区最高通行速度v2、通行时间t2和减速时间t3使得所述通行区(15)车辆离开后,所述缓冲区(16)的车辆前进至所述通行区(15)内,所述缓冲区最高通行速度v2等于所述车辆蠕动速度v
r
;所述云端控制系统(11)根据所述缓冲区(16)的车队长度向所述等候区(17)内对应长度的区间内的车辆下达减速指令,使所述等候区(17)对应长度区间内的最后一辆车进入所
述缓冲区(16)时行驶速度保持为所述车辆蠕动速度v
r
。10.根据权利要求7所述的一种交叉路口分区同步通行控制方法,其特征在于,还包括步骤s4,所述云端控制系统(11)将控制指令显示在所述中控面板(10)上提示所述驾驶员(18),所述驾驶员(18)人为操控汽车,所述驾驶员(18)人为操纵汽车时无法超出所述云端控制系统(11)所规定的速度区间。
技术总结
本发明涉及交通控制方法领域,具体公开了一种交叉路口分区同步通行控制系统及方法,该系统包括车载控制系统、地面控制系统和云端控制系统,车载控制系统包括车载信息收集模块和车载信号发射接收器,地面控制系统包括信号灯系统、车辆识别系统和路口通信总模块,云端控制系统接收信息并进行计算后,将车辆行驶区域分成通行区、缓冲区和等候区,并向地面控制系统和车载控制系统发出指令。本发明从车辆启停反应及车辆间的协同启动入手,改变车辆启停动作需逐步传递给后车的现状,控制交通路口处车辆在一定时间范围内同时启停,缩短车辆反应时间,解决车队蠕动前行的问题,缓解高峰期十字路口处交通堵塞,减少追尾事故,缩短高峰期车辆的通行时间。辆的通行时间。辆的通行时间。
技术研发人员:董华军 赵一鉴
受保护的技术使用者:大连交通大学
技术研发日:2021.08.11
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。