1.本发明涉及空间交会对接技术领域,具体涉及一种适用于空间交会对接激光雷达的能量自适应控制方法,用于空间交会对接激光雷达的研制,还可推广于其他交会对接使用的交会激光雷达设计。
背景技术:
2.空间交会对接是空间技术的一个关键技术。相对测量敏感器激光雷达用于两个航天器在太空中几十公里到最终完成对接前的距离、距离变化率、角度以及角度变化率等参数的测量。
3.在两航天器交会对接的过程中,远距离跟踪远场合作目标,近距离跟踪近场合作目标,在不同距离段,需要对激光雷达的能量进行自动调节。大于10km的远距离段,将激光器电流,电路两级增益vga以及调光盘能量调节到最大;小于10km的中近距离段,需要根据探测到的回波能量自适应调节激光雷达的能量,将回波强度控制到合适的范围。回波强度太弱,难以保证激光雷达进入稳定跟踪状态,回波能量太强,又容易导致探测器损伤,此外,在远场目标和近场目标相互切换的过程中,也需要调节能量,以便顺利跟踪待跟踪的目标。这就意味着,在飞船的交会对接过程中,需要对激光雷达的能量进行自适应控制,进而保证交会对接过程的顺利进行。从目前公开发表的文献和专利来看,尚无与此相关的交会对接激光雷达能量自适应控制方法。
技术实现要素:
4.有鉴于此,本发明的技术解决问题是:提供一种适用于空间交会对接激光雷达的能量自适应控制方法。
5.为了达到上述目的,本发明的技术方案是这样实现的:
6.一种适用于空间交会对接激光雷达的能量自适应控制方法,该方法为实时能量控制方法,且该方法包括以下步骤:
7.步骤(1):在扫描阶段,首先根据距离分段设置扫描能量,以便于激光雷达在扫描的过程中发现目标,当探测到目标以后进入跟踪状态;
8.步骤(2):在跟踪阶段,激光雷达根据跟踪的目标实时调节能量,主要分为大于10km距离的能量调节和其他距离的能量调节方法,并且在飞船逼近和撤离时有不同的调节方式;
9.其中,步骤(2)包括:
10.步骤(21):当激光雷达处于跟踪阶段,且此时距离大于10km,激光雷达将激光器电流调节到最大,电路两级增益vga调节到最大,并且调光盘能量也调节到最大,无论是飞船逼近还是撤离,激光雷达的能量始终保证到最大;其中,所述两级增益vga包括一级vga和二级vga;
11.步骤(22):当激光雷达处于跟踪阶段,且此时距离小于等于10km,激光雷达将根据
回波强度的幅值进行闭环控制能量,并且根据逼近和撤离有不同的能量控制方法。
12.进一步的,步骤(1)中,所述的根据距离分段设置扫描能量所涉及的距离段和能量的具体设置如下:在0~2m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为220;在2m~10m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为180;在10m~100m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为100;在100m~400m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为35;在400m~2000m,激光器电流为b档,二级vga值为600,一级vga为b档,调光盘为35;在2000m~4000m,激光器电流为c档,二级vga值为600,一级vga为c档,调光盘为35;在4000m~10000m,激光器电流为d档,二级vga值为600,一级vga为d档,调光盘为35;在10000m以上,激光器电流为e档,二级vga值为600,一级vga为e档,调光盘为35;其中,调光盘的值越小,代表出光能量越强,调光盘的值越大,代表出光能量越弱,其值代表了范围1~10000倍的回波能量变化。
13.进一步的,步骤(22)中,所述的根据逼近和撤离有不同的能量控制方法具体包括:
14.在激光雷达随飞船逼近目标时,在小于10km的中远距离段,首先调节两级增益vga,通过一级vga和二级vga联合调整,将回波强度的幅值始终控制到800,即峰值的三分之二,然后,当一级vga调节到最小时,进行二级vga与激光器电流的联合调节,同样将回波强度的幅值始终控制到800,最后,当激光器电流与二级vga均调节到最小时,进行调光盘能量调节,此时将回波强度的幅值始终控制到600;
15.在激光雷达随飞船撤离目标时,在小于10km的近距离段,首先通过调光盘能量调节,将回波强度的幅值控制到600,其次,当调光盘的能量调节到最大时,进行二级vga与激光器电流联合调节,此时将回波强度控制到800,接着,当二级vga与激光器电流都调节到最大时,进行一级vga与二级vga的联合调节,同样将回波强度的幅值控制到800,然后当两级增益vga、激光器电流以及调光盘能量均调节到最大时,且距离小于10km,保持当前的能量,以保证激光雷达能够跟踪目标。
16.进一步的,步骤(22)中,所述的根据回波强度的幅值进行闭环控制能量具体包括:首先,设置比例系数kp,其值为0.05,然后,将当前回波强度值
‑
回波强度中心值作为回波强度偏差值并取绝对值,然后将偏差值乘以比例系数kp作为反馈值,如果是用于增益vga调节,则最大调节值为30,否则vga的调节值作为反馈值,如果是用于调光盘闭环调节,则将偏差值作为调光电机分频系数的计算依据,控制电机转动到合适的角度,单次反馈值最大不超过10。
17.进一步的,二级vga的调节范围为100~600,且能进行连续调整,每个循环的最小调节值为1,最大调节值为30。
18.进一步的,一级vga的调节值是分档调节,档位1~6分别对应的值为100、200、300、400、500、600。
19.进一步的,激光器电流的调节值是分档调节,档位a~e分别对应的电流值为0.05a、0.08a、0.12a、0.15a、0.18a。
20.进一步的,调光盘的调节范围是35~250,并且可以连续调整,每个循环的最小调节值为1,最大值为10。
21.本发明和现有技术相比所具有的优点在于:
22.本发明设计了一种有效的交会对接激光雷达能量自适应控制方法,该方法简单实用,并可确保激光雷达的能量调节有效,为交会对接提供了技术参考。同时,本发明还可以推广到其他交会对接任务中的激光雷达能量调节中,进而设计相应的软硬件策略。
附图说明
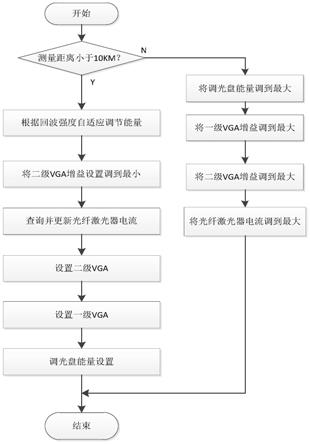
23.图1是本发明的能量调节步骤图;
24.图2是本发明中二级vga与一级vga档位调节流程图;
25.图3是本发明中二级vga与电流档调节流程图;
26.图4是本发明中调光盘的能量调节流程图。
具体实施方式
27.下面结合附图及具体实施例对本发明再作进一步详细的说明。
28.空间交会对接激光雷达主要用于飞船与空间站的交会对接,为两器的对接提供相对位姿参数,包括距离、距离变化率、角度、角度变化率等。随着距离的逼近或者撤离,对激光雷达的能量要求也不一样,远距离时,要求出光能量尽量强以至于能发现并跟踪目标,但是在近距离时又需要能量不要过强以至于损伤探测器。因此,需要对能量进行自适应控制。本发明的整个能量控制方法是实时的,且能量控制步骤如附图1所示,包括:
29.步骤(1):在扫描阶段,首先根据距离分段设置扫描能量,以便于激光雷达在扫描的过程中发现目标,当探测到目标以后进入跟踪状态;
30.步骤(2):在跟踪阶段,激光雷达根据跟踪的目标实时调节能量,主要分为大于10km距离的能量调节和其他距离的能量调节方法,并且在飞船逼近和撤离时有不同的调节方式;
31.其中步骤(2)包括:
32.步骤(21):当激光雷达处于跟踪阶段,且此时距离大于10km,激光雷达将激光器电流调节到最大,电路两级增益vga调节到最大,并且调光盘能量也调节到最大,无论是飞船逼近还是撤离,激光雷达的能量始终保证到最大;
33.步骤(22):当激光雷达处于跟踪阶段,且此时距离小于等于10km,激光雷达将根据回波强度的幅值进行闭环控制能量,并且根据逼近和撤离有不同的能量控制方法;
34.随着距离的不同,需要控制不同的参数,具体地,在激光雷达随飞船逼近目标时,在小于10km的中远距离段,首先调节两级vga,通过一级vga和二级vga联合调整,将回波强度的幅值始终控制到800,然后,当一级vga调节到最小时,进行二级vga与激光器电流的联合调节,同样将回波强度的幅值始终控制到800,最后,当激光器电流与二级vga均调节到最小时,进行调光盘能量调节,此时将回波强度的幅值始终控制到600;在激光雷达随飞船撤离目标时,在近距离段,首先通过调光盘能量调节,将回波强度的幅值控制到600,其次,当调光盘的能量调节到最大时,进行二级vga与激光器电流联合调节,此时将回波强度控制到800,接着,当二级vga与激光器电流都调节到最大时,进行一级vga与二级vga的联合调节,同样将回波强度的幅值控制到800,然后当两级vga、激光器电流以及调光盘能量均调节到最大时,且距离小于10km,保持当前的能量,以保证激光雷达能够跟踪目标,最后,当距离大于10km,如果当前能量不是最大,则将vga、激光器电流和调光盘均调节到最大。
35.此外,随着距离的不同,不同参数的控制方法也有所差异,在远距离阶段,如附图2所示,当激光器电流已经调节到最大时,此时需要通过一级vga与二级vga进行联合调节,将回波强度幅值控制到800,整个调节方式与电流档和二级vga的调节方式类似,首先,设置比例系数kp,其值为0.05,然后,将当前回波强度值
‑
回波强度中心值作为回波强度偏差值并取绝对值,然后将偏差值乘以比例系数kp作为反馈值,且最大调节值为30,否则为该反馈值。当二级vga调节到两端的极限值时,此时就需要一级vga档位进行升档或者降档。当二级vga在100~600的可调节范围内时,根据回波强度偏差计算出的vga调整值即为二级vga的调节值,此时就只需要对二级vga进行调节。在中远距离阶段,如附图3所示,先进行二级vga与激光器电流的联合控制,首先,设置比例系数kp,其值为0.05,然后,将当前回波强度值
‑
回波强度中心值作为回波强度偏差值并取绝对值,然后将偏差值乘以比例系数kp作为反馈值,且最大调节值为30,否则为该反馈值。当二级vga调节到两端的极限值时,此时就需要激光器电流档位进行升档或者降档。当二级vga在100~600的可调节范围内时,根据回波强度偏差计算出的vga调整值即为二级vga的调节值,此时就只需要对二级vga进行调节。在近距离阶段,如附图4所示,进行调光盘的能量控制,首先,设置比例系数kp,其值为0.05,然后,将当前回波强度值
‑
回波强度中心值作为回波强度偏差值并取绝对值,然后将偏差值乘以比例系数kp作为反馈值,且最大调节值为10,否则为该反馈值。将反馈值转换为电机的分频系数控制电机转动到合适的位置,即可始终将回波强度的幅值控制到600。
36.最后,在目标丢失时,或者激光雷达处于刚上电状态,此时需要对激光雷达的扫描能量进行设置,具体的设置如下:
37.在0~2m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为220;在2m~10m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为180;在10m~100m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为100;在100m~400m,激光器电流为最小的a档,二级vga值为100,一级vga为最小的a档,调光盘为35;在400m~2000m,激光器电流为b档,二级vga值为600,一级vga为b档,调光盘为35;在2000m~4000m,激光器电流为c档,二级vga值为600,一级vga为c档,调光盘为35;在4000m~10000m,激光器电流为d档,二级vga值为600,一级vga为d档,调光盘为35;在10000m以上,激光器电流为e档,二级vga值为600,一级vga为e档,调光盘为35。
38.其中,调光盘的值越小,代表出光能量越强,调光盘的值越大,代表出光能量越弱,其值代表了范围1~10000倍的回波能量变化。
39.以上为本发明所公开具体实施例,未详细阐述的部分属于本领域公知技术。但本发明的保护范围并不局限于此,任何熟悉本领域的技术人员在本发明所揭露的技术范围内,所作的任何修改、等同替换和改进等,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

