1.本发明属于光学测量技术领域,具体涉及一种透过散射介质的快速三维成像方法,通过向被测目标投影三帧以下周期性条纹,利用散射介质的光学记忆效应重建受物体调制的变形条纹,基于傅里叶变换条纹轮廓术或相移轮廓术获取物体三维形貌信息。
背景技术:
2.光学三维测量技术在国家安全、航空航天以及空间遥感等领域的应用凸显了散射环境中三维成像的重要性。
3.光遇到散射介质时,有序的光波前被扰乱,导致所成图像模糊甚至成为散斑。通常情况下无法获取散斑光强分布的具体函数,只能通过其统计特性来解决实际问题。虽然光在多重散射介质中传播具有很高的随机性,但当散射介质处于稳定状态时,光在散射介质中的传播具有确定性。i.freund等人发现,轻微调整入射角度,所得散斑会发生相应的整体移动,而强度不会有明显变化,即散射介质的光学记忆效应。基于光学记忆效应的散斑解卷积成像法,通过点光源获取系统的点扩散函数(point spread function,psf),将物体对应散斑和系统psf做反卷积运算,无需多次迭代求解相位,可对单个二维目标或系统轴向离散位置处不同二维目标实现高质量成像。然而,对隐藏于透过散射介质中,具有连续三维面型的物体的真三维成像未见报道。
技术实现要素:
4.本发明克服现有技术存在的不足,所要解决的技术问题为:提供一种透过散射介质的快速三维成像方法,将结构光投影轮廓术引入基于光学记忆效应的散斑解卷积成像技术,结合变形条纹与被测三维物体面形高度的点对点的关系,提高散射环境下的三维成像的速度和精度,实现透过散射介质的“真三维”成像。
5.为了解决上述技术问题,本发明采用的技术方案为:一种透过散射介质的快速三维成像方法,采用的成像装置包括图像采集器、参考平面和数字光投影仪,数字光投影仪发射的信号经参考平面反射,经散射介质后被图像采集器接收,所述三维成像方法包括以下步骤:
6.s1、系统校正:获得成像装置的点扩散函数;
7.s2、向参考平面投影一帧或多帧正弦条纹,经参考平面反射通过散射介质后,通过图像采集器采集对应散斑;
8.s3、将被测物体固定到参考平面,向被测物体投影相同的正弦条纹,通过图像采集器采集经物体表面反射并通过散射介质后的受物体高度调制的变形条纹所对应的散斑;
9.s4、对步骤s2和s3得到的散斑分别与系统的点扩散函数进行反卷积运算,得到经参考平面后的正弦条纹和经过物体调制后的正弦条纹,利用相位恢复算法获取与物体三维信息点/点对应的相位,实现透过散射介质快速三维成像。
10.进一步地,所述步骤s1中,成像装置的点扩散函数的获得方法为:透过散射介质分
别采集尺寸为3
×
3个像素的点光源o
p
所对应的散斑oc,通过点光源与散斑获取点扩散函数。
11.进一步地,数字光投影仪与图像采集器在同一垂直或水平平面内,且二者主光轴存在夹角。
12.进一步地,所述步骤s2中,投影一帧正弦条纹时,对应地,所述步骤s4的具体步骤为:
13.s411、对步骤s2和s3得到的散斑分别与系统的点扩散函数进行反卷积运算,得到透射散射介质并分别经参考平面反射后的正弦条纹和经过物体调制后的正弦条纹,然后进行快速做傅里叶变换得到对应的频域谱分布,滤出基频分量;
14.s412、然后通过逆傅里叶变换获取截断相位;
15.s413、通过相位展开算法获得与物体三维形貌点对点对应的相位信息,实现透过散射介质的三维成像。
16.进一步地,所述步骤s2中,投影的一帧正弦条纹的表达式为:i
p
(x
p
,y
p
)=a
p
b
p
cos(2πf
p
x
p
);其中,(x
p
,y
p
)表示二维坐标,a
p
表示投影条纹图像的平均灰度,b
p
表示投影条纹图像的调制强度,f
p
表示投影条纹的频率。
17.进一步地,所述步骤s2中,投影多帧正弦条纹时,各帧图像的相移量为δ=2π/n,其中n表示投影正弦条纹的帧数,对应地,所述步骤s4的具体步骤为:
18.s421、对步骤s2和s3得到的散斑分别与系统的点扩散函数进行反卷积运算,得到透过散射介质并分别经参考平面后反射的条纹图案i
srn
(n=1,2,
……
n)和经过物体调制后的条纹图案i
son
(n=1,2,
……
n);
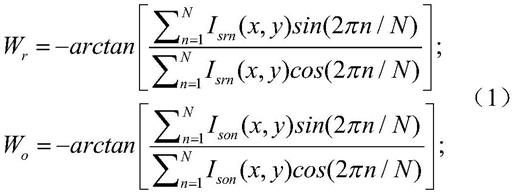
19.s422、分别计算参考平面的截断相位w
r
和被成像物体相应的截断相位w
o
,计算公式为:
[0020][0021][0022]
s423、通过相位展开算法获得与物体三维形貌点对点对应的相位信息,实现透过散射介质的快速三维成像。
[0023]
进一步地,所述n取值为3。
[0024]
进一步地,所述的一种透过散射介质的快速三维成像方法中,投影的三帧正弦条纹的表达式为:i
p
(x
p
,y
p
)=a
p
b
p
cos(2πf
p
x
p
nδ)(n=0,1,2);其中,i
p
表示强度,(x
p
,y
p
)表示二维坐标,a
p
表示投影条纹图像的平均灰度,b
p
表示投影条纹图像的调制强度,f
p
表示投影条纹的频率。
[0025]
本发明与现有技术相比具有以下有益效果:
[0026]
本发明提供了一种透过散射介质的快速三维成像方法,通过侵入式的向被测物体投影一帧或多帧周期性图案,采用散斑解卷积成像法,实现透过散射介质的真三维成像,其将结构光投影轮廓术引入基于光学记忆效应的散斑解卷积成像技术,结合变形条纹与被测
三维物体面形高度的点对点的关系,提高了散射环境下的三维成像的速度和精度。
附图说明
[0027]
图1为本发明实施例提供的一种透过散射介质的快速三维成像方法的成像结构示意图;
[0028]
图2为本发明实施例中透过散射介质单次曝光三维成像流程图;(a)透过散射介质快速三维成像实验原理图;(b)受物体调制的变形条纹图;(c)图像采集器采集变形条纹对应散斑;(d)散斑与点扩散函数解卷积重建变形条纹图;(e)重建物体。
[0029]
图中:1:图像采集器,2:散射介质,3:光阑,4:参考平面,5:数字光投影仪。
具体实施方式
[0030]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例;基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0031]
实施例一
[0032]
如图1所示,本发明实施例一提供了一种透过散射介质的快速三维成像方法,采用的成像装置包括图像采集器、参考平面和数字光投影仪,数字光投影仪发射的信号经参考平面反射,经光阑3被散射介质2散射后被图像采集器接收,数字光投影仪5与图像采集器1在同一垂直或水平平面内,且二者主光轴存在夹角。所述三维成像方法包括以下步骤:
[0033]
s1、系统校正:获得成像装置的点扩散函数。
[0034]
所述步骤s1中,成像装置的点扩散函数的获得方法为:透过散射介质分别采集尺寸为3
×
3个像素的点光源o
p
所对应的散斑oc,通过点光源与散斑获取点扩散函数o
psf
。
[0035]
s2、通过数字光投影仪5向参考平面投影一帧正弦条纹,经参考平面反射通过散射介质2后,通过图像采集器采集对应散斑i
sr’。
[0036]
其中,投影的一帧正弦条纹的表达式为:i
p
(x
p
,y
p
)=a
p
b
p
cos(2πf
p
x
p
);其中,(x
p
,y
p
)表示二维坐标,a
p
表示投影条纹图像的平均灰度,b
p
表示投影条纹图像的调制强度,f
p
表示投影条纹的频率。
[0037]
s3、将被测物体固定到参考平面4,向被测物体投影相同的正弦条纹,通过图像采集器采集经物体表面反射并通过散射介质2后的受物体高度调制的变形条纹所对应的散斑i
so’;经物体三维面型调制并反射的变形条纹为i
c
(x
c
,y
c
)=a
c
(x
c
,y
c
) b
c
(x
c
,y
c
)cos[φ(x
c
,y
c
)],其中,a
c
表示采集条纹图像的平均灰度,b
c
表示采集条纹图像的调制强度,f0是ccd采集条纹的载波频率,是调制相位,是获取物体三维信息的关键因素。
[0038]
具体地,图像采集器可以为ccd相机,投影图案通过数字光投影仪5发出,步骤s2和s3中,图像采集器和数字光投影仪5相对于参考平面4位置固定。
[0039]
s4、对步骤s2和s3得到的散斑i
sr’和i
so’分别与系统的点扩散函数o
psf
进行反卷积运算,得到经参考平面后的正弦条纹和经过物体调制后的正弦条纹,利用相位恢复算法获取与物体三维信息点/点对应的相位,实现透过散射介质快速三维成像。
[0040]
所述步骤s4的具体步骤为:
[0041]
s411、分别对i
sr’、o
psf
和i
so’、o
psf
进行反卷积运算,得到透射散射介质并分别经参考平面反射后的正弦条纹i
p’和经过物体调制后的正弦条纹i
c’,然后进行快速做傅里叶变换得到对应的频域谱分布,滤出基频分量;
[0042]
s412、然后通过逆傅里叶变换获取截断相位;
[0043]
s413、通过相位展开算法获得与物体三维形貌点对点对应的相位信息,实现透过散射介质的三维成像。
[0044]
如图2所示,为本发明实施例中透过散射介质单次曝光三维成像的示意图,通过图2可以看出,本实施例基于快速傅里叶变换的单帧正弦条纹投影,可以实现透过散射介质单次曝光三维成像。
[0045]
实施例二
[0046]
本发明实施例二提供了一种透过散射介质的快速三维成像方法,采用的成像装置与实施例一相同,不同是的,本实施例基于相移测量轮廓术的三帧正弦条纹投影,实现三维成像,本实施例的三维成像方法包括以下步骤:
[0047]
s1、系统校正:获得成像装置的点扩散函数。
[0048]
所述步骤s1中,成像装置的点扩散函数的获得方法为:透过散射介质分别采集尺寸为3
×
3个像素的点光源o
p
所对应的散斑oc,通过点光源与散斑获取点扩散函数o
psf
。
[0049]
s2、通过数字光投影仪5向参考平面投影三帧相对相移量为δ=2π/n的正弦条纹,投影的三帧正弦条纹的表达式为:i
p
(x
p
,y
p
)=a
p
b
p
cos(2πf
p
x
p
nδ)(n=0,1,2);其中,i
p
表示强度,(x
p
,y
p
)表示二维坐标,。经参考平面反射通过散射介质2后,通过图像采集器采集对应散斑i
sr1’、i
sr2’、i
sr3’。
[0050]
s3、将被测物体固定到参考平面,向被测物体投影相同的三条正弦条纹,通过图像采集器采集经物体表面反射并通过散射介质2后的受物体高度调制的变形条纹所对应的散斑i
so1’、i
so2’、i
so3’。
[0051]
受被测物体高度调制,由被测物体表面反射的正弦条纹为i
c
(x
c
,y
c
)=a
c
b
c
cos[φ(x
c
,y
c
) nδ](n=0,1,2),其中φ(x
c
,y
c
)是受到物体面形调制后的相位,与物体的三维结构息息相关。
[0052]
s4、对步骤s2和s3得到的散斑i
sr1’、i
sr2’、i
sr3’和i
so1’、i
so2’、i
so3’分别与系统的点扩散函数o
psf
进行反卷积运算,得到经参考平面后的正弦条纹i
sr1
、i
sr2
、i
sr3
和经过物体调制后的正弦条纹i
sr1
、i
sr2
、i
sr3
,利用相位恢复算法获取与物体三维信息点/点对应的相位,实现透过散射介质快速三维成像。
[0053]
所述步骤s4的具体步骤为:
[0054]
s421、对步骤s2和s3得到的散斑i
sr1’、i
sr2’、i
sr3’和i
so1’、i
so2’、i
so3’分别与系统的点扩散函数o
psf
进行反卷积运算,得到经参考平面后的正弦条纹i
sr1
、i
sr2
、i
sr3
和经过物体调制后的正弦条纹i
sr1
、i
sr2
、i
sr3
;
[0055]
s422、分别计算参考平面的截断相位w
r
和被成像物体相应的截断相位w
o
,计算公式为:
[0056][0057]
其中,n=3,表示相移次数。
[0058]
s423、通过相位展开算法获得与物体三维形貌点对点对应的相位信息,实现透过散射介质的快速三维成像。
[0059]
综上所述,本发明提供了一种透过散射介质的快速三维成像方法,通过侵入式的向被测物体投影一帧或多帧周期性图案,采用散斑解卷积成像法,实现透过散射介质的真三维成像,其将结构光投影轮廓术引入基于光学记忆效应的散斑解卷积成像技术,结合变形条纹与被测三维物体面形高度的点对点的关系,提高了散射环境下的三维成像的速度和精度。
[0060]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

