1.本发明涉及光学技术领域,特别涉及一种光线小角度测量方法及系统。
背景技术:
2.光线入射角度的测量在基础研究、测试计量、目标探测等领域均有非常广泛的应用,角度的测量是几何量计量技术的重要组成部分。光线入射角度测量系统大多采用光学测角法,近些年常用的有圆光栅测角法和激光干涉测角法等,已经得到广泛应用,并且达到较高的测量精度,但目前依然存在一些亟待解决的问题,一是测量精度的突破,一旦测量精度提高一个量级,将能够大幅提升与空间目标探测相关的各类应用的探测能力;二是制造加工困难,结构复杂,成本高。现有专利公布号cn111256649a用单个锥透镜进行角度放大,通过光斑图像测量光线入射角度的方法,测量结构简单,但该方法得到的光斑图像的特征信息不是单调规律变化的,需要对不同光线角度进行分段处理,精度上不能保证一致性,同时还存在光斑图像面积过大,实际实现过程中可能涉及图像拼接的问题。
技术实现要素:
3.本发明技术解决问题:克服现有技术的不足,提供一种光线小角度测量方法及系统,具有角度测量分辨率高,同时测量简单的优点。
4.本发明的原理:利用望远系统、锥透镜、图像采集系统和图像处理系统,入射光线经望远系统角度放大后再通过光阑进入锥透镜大端端面,在锥透镜侧面实现全反射,随着全反射次数增多,全反射入射角逐渐减小,最终从锥透镜侧壁出射,形成单调规律变化的光斑图像,在整个小角度测量范围内采用同一种图像处理方法对光斑图像特征信息进行处理即计算得到对应的光线入射角度。
5.为达到上述目的,本发明采用如下技术方案:
6.本发明的技术解决方案之一:一种光线小角度测量方法,小角度入射光线从望远系统进入,经望远系统后实现角度放大,再进入锥透镜大端端面到达侧壁,经若干次全反射从锥透镜侧壁出射,形成具有规律性变化的特征信息的光斑图像,对所述光斑图像进行图像处理后得到光线入射角度;所述特征信息包括光斑图像的对称轴方向、质心位置、面积和转动惯量。如图4所示,所述入射光线小角度区间为转动惯量。如图4所示,所述入射光线小角度区间为其中表示锥透镜的半锥角,n是锥透镜材料的折射率,β是望远系统的放大倍率。所述经望远系统后角度放大后入射到锥透镜大端端面的角度区间为其中表示锥透镜的半锥角,n是锥透镜材料的折射率。
7.实现上述方法的光线小角度测量系统,包括:望远系统、光阑、锥透镜、图像采集系统以及图像处理系统。
8.入射光线从望远系统进入,经望远系统后再通过光阑进入锥透镜大端端面到达侧壁,从锥透镜侧壁出射到图像采集系统,形成具有规律性变化的特征信息的光斑图像,显示在图像显示系统上,经图像处理系统对光斑图像进行处理后可得到光线入射角度。
9.所述望远系统,采用伽利略或开普勒望远系统,置于光阑前端且与光阑同轴放置,将将的小角度光线放大为的较大角度光线入射到锥透镜,入射光线的微小角度变化经望远系统后会形成明显的角度变化,从而带来光斑图像特征的明显变化,起到集中能量、提高精度的作用;
10.所述光阑,形状为圆形通孔,尺寸小于或等于锥透镜大端口径,置于锥透镜大端表面,且与锥透镜同轴放置;
11.所述锥透镜,其参数包括大端口径、锥长、锥角、材料折射率等,不同参数的锥透镜会形成特征信息不同的光斑图像,置于光阑后端且与光阑同轴放置,锥透镜大端端面与图像采集系统接收面平行放置且锥透镜尖端靠近图像采集系统接收面,入射光线在锥透镜中发生全反射,不同角度的入射光线发生全反射的次数不同,当不满足全反射条件后从锥透镜的侧壁不同位置出射到图像采集系统,形成不同的光斑图像,入射光线经望远系统、光阑和锥透镜后形成的光斑图像均能被单个图像采集系统接收面完整接收,且光斑图像的特征信息呈规律性变化;
12.所述图像采集系统,接收面完整,不损失图像信息,能够完整接收不同角度入射光线经望远系统、光阑和锥透镜后形成的不同光斑图像;
13.所述图像处理系统,将图像采集系统的不同光斑图像进行处理,根据不同的光斑图像中的特征信息计算得到对应的不同光线入射角度;
14.所述图像显示系统,显示接收到的光斑图像;
15.所述图像显示系统,用于显示接收到的光斑图像。
16.所述具有规律性变化的特征信息包括对称轴方向、面积、质心位置、转动惯量等。
17.如图2所示为光线在锥透镜子午面及非子午面内传播的光线轨迹图。在锥透镜的子午面内,例如光线1的传播轨迹,光线打在图像采集系统上的高度与入射角度的关系表示为为其中l表示锥透镜的锥长,k表示第k次全反射,α
k
为入射光线与锥透镜壁法线方向的夹角,θ0表示锥透镜的半张角,α表示光线的入射角,n是锥透镜材料的折射率。不同于子午面内的光路轨迹,入射光线在非子午面中的光路轨迹一般是空间螺旋折线,折线可为左旋也可为右旋,当光线入射角度大于某一值时,光线在锥透镜的非子午面会将光线折射到远离中心的位置,例如光线2的传播轨迹,此时光斑图像必然会分裂,分裂后的图像过大,目前实际中存在的图像采集系统难以完整地接收,且光斑分裂后图像将不再是线性规律变化,需提取其他特征信息,同时也需改变图像处理方法,最终必然会造成不同入射光线角度的测量精度不一致的情况,因此分裂后的图像不可取,而本发明只针对小角度测量,对于小角度入射光线,其光斑图像变化呈规律性变化,且光斑面积适中。
18.进一步地,通过图像处理方法对图像采集系统接收到的光斑信息进行处理,与标定数据进行比对或插值处理,即可得到光线入射角度。
19.进一步地,通过图像采集系统接收到具有对称性和规律性变化的光斑图像,图像特征如质心位置、面积等确定了图3中光线的α角度;图像对称轴的方向确定了图3中光线的方位角β角度。
20.本发明与现有技术相比的优点在于:
21.(1)本发明针对入射光线角度(1)本发明针对入射光线角度的小角度光线,得到的光斑图像特征信息呈单调规律性变化,因此在整个小角度测量范围内采用同一种图像处理方法对光斑图像特征信息进行处理就可以计算得到入射角度,无需对测量角度进行分段处理,且整个小角度测量范围内形成的光斑均能被单个图像采集系统接收面完整接收。本发明具有角度测量分辨率高,同时测量方法简单等优点。
22.(2)本发明中望远系统和锥透镜均具有角度放大作用,通过不同光斑图像的特征信息如对称轴方向、质心位置、面积等可求解得到实时的光线入射角度。同样的小角度变化,相比于直接采用锥透镜的方法,经过望远系统的角度放大,角度变化会更剧烈,再经锥透镜得到更明显且规律变化的光斑图像,可以进一步提高光线小角度变化的测量精度;并且望远系统的入瞳替代了现有专利公布号cn111256649a中的光阑,增大了系统的光通量,进而提高了图像采集系统的信噪比。
附图说明
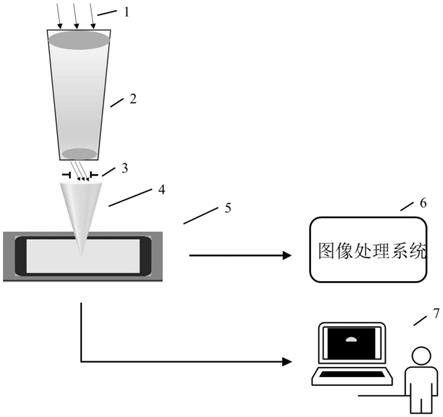
23.图1为本发明实施例提供的系统结构示意图;
24.图2为本发明实施例中光线在锥透镜子午面及非子午面内传播的光路示意图;
25.图3为本发明实施例中光线入射角度示意图;
26.图4为本发明实施例提供的光线在锥透镜子午面内传播的光线轨迹图;
27.图5为本发明实施例提供的不同入射角度光线在图像采集系统上形成的光斑图像仿真图。
具体实施方式
28.本发明实施例提供一种光线小角度测量方法及系统。该系统包括望远系统、光阑、锥透镜、图像采集系统和图像处理系统,入射光线经望远系统角度放大后再通过光阑进入锥透镜大端端面到达侧壁进行全反射,从锥透镜侧壁出射,形成光斑图像,经图像处理系统对光斑图像特征信息处理后,可计算得到对应的光线入射角度。下面结合附图并通过实例对其详细的介绍。
29.实施例
30.如图1
‑
2所示,本发明一种光线小角度测量系统包括:望远系统2、光阑3、锥透镜4、图像采集系统5、图像处理系统6以及图像显示系统7。入射光线1从望远系统前端口径入射到光学系统,其中:
31.望远系统2的放大倍率和尺寸等参数需要根据锥透镜4及图像采集系统5的参数确
定。放大倍率过大可能导致光束能量过于集中,形成的光斑图像过小,影响其分辨率;放大倍率过小则起不到角度放大作用,且光束能量较分散。
32.在具体实现时,可根据系统需要自行设计,也可购买现成的望远镜模块,安装时可设置各透镜与锥透镜4同轴放置。在本实施例中,采用放大倍率为5.3倍、通光口径尺寸为11mm的伽利略型望远系统,入射角度为0
°
~3
°
的光线经望远系统放大为0
°
~15.9
°
的出射光线,入射光线的微小角度变化经望远系统后会形成明显的角度变化,从而带来光斑图像特征的明显变化,提高光线角度的测量精度。
33.光阑3形状为圆形,安装参数可包括其与锥透镜4的距离等。
34.在具体实现时,光阑可紧贴锥透镜4大端端面放置,尺寸小于等于锥透镜大端口径。
35.锥透镜4的大端口径、锥长和锥角等参数需根据望远系统2的尺寸参数确定。安装参数可包括望远系统2与锥透镜4的距离,锥透镜4与图像采集系统5接收面的距离,锥透镜4大端端面与图像采集系统5接收面之间的角度等。
36.在具体实现时,可设置望远系统2与锥透镜4的尺寸匹配,且两者相距较近,锥透镜4尖端靠近图像采集系统5接收面放置,锥透镜4大端端面平行于图像采集系统5接收面。在本实施例中,锥透镜材料为h
‑
zbaf21,大端口径为10mm,锥角为28.1
°
,0
°
~3
°
的入射光线经望远系统、光阑和锥透镜后形成的光斑图像均能被单个图像采集系统接收面完整接收,且光斑图像的特征信息呈规律性变化。
37.图像采集系统5用于接收入射光线经光学系统后形成的光斑图像。
38.在具体实现时,可根据系统需要选择ccd或cmos等图像采集系统。
39.图像处理系统6用于处理图像采集系统5接收到的光斑图像特征信息,包括光斑图像的对称轴方向、面积、质心位置等。
40.在具体实现时,可通过提取光斑图像的对称轴方向来计算得到对应的入射光线方位角信息,通过光斑图像面积、质心位置等多种途径计算得到入射光线的角度信息,从而保证对入射光线角度的测量精度。
41.如图3所示,通过图像采集系统接收到具有对称性和规律性变化的光斑图像,以锥透镜尖端投影到图像采集系统接收面上的点为原点建立坐标系,图像特征如质心位置、面积等可确定图3中光线的倾斜角α角度;图像对称轴的方向可确定图3中光线的方位角β角度。
42.本实施例中,采用的望远系统放大倍率为5.3倍,锥透镜材料为h
‑
zbaf21,大端口径为10mm,锥角为28.1
°
。入射光线望远系统和锥透镜后形成的光斑图像如图5所示,图中:(a)光线入射角度为0
°
,(b)光线入射角度为0.2
°
,(c)光线入射角度为0.4
°
,(d)光线入射角度为0.6
°
,(e)光线入射角度为0.8
°
,(f)光线入射角度为1
°
,(g)光线入射角度为1.2
°
,(h)光线入射角度为1.4
°
,(i)光线入射角度为1.6
°
,(g)光线入射角度为1.8
°
,(k)光线入射角度为2
°
,(l)光线入射角度为2.2
°
,(m)光线入射角度为2.4
°
,(n)光线入射角度为2.6
°
,(o)光线入射角度为2.8
°
,(p)光线入射角度为3
°
,其中采用的望远系统放大倍率为5.3,锥透镜材料折射率为1.72,大端口径为10mm,锥角为28.1
°
。
43.图5中光斑图像能够被图像采集系统接收面完整接收,无需经过图像拼接等处理,一定程度上避免了图像信息损失,且光斑图像的特征信息包括质心位置、面积等在整个0
°‑
3
°
光线入射角度范围内呈规律性变化,入射光线的角度信息与光斑图像的特征信息是一一对应关系,以锥透镜尖端投影到图像采集系统接收面上的点为原点建立坐标系,对光斑图像的特征信息包括对称轴方向、质心位置、面积等进行图像处理,与标定数据进行比对或插值处理,即可得到入射光线的角度信息,根据转动惯量的计算公式值处理,即可得到入射光线的角度信息,根据转动惯量的计算公式其中,(i0,j0)表示锥透镜中心轴线与成像面的交点,m、n表示图像的像素尺寸,f(i,j)表示在该位置处二值化图像的灰度值,采用转动惯量的方法求解入射角度,得到的测量精度相比现有专利公布号cn111256649a精度提高了32%。
44.最后应说明的是:以上实施例仅用于说明本发明的技术方案,而非对其限制。本领域的普通技术人员应当理解:对前述实施例所记载的技术方案进行修改或对其中部分或者全部技术特征进行等同替换的行为,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

