1.本发明属于石油工程领域,具体地,涉及一种全电控井下安全阀旋转设备故障诊断方法及系统。
背景技术:
2.井喷事故是威胁油气安全生产的重要因素。一旦发生井喷事故将造成巨大的经济、财产、人员和环境损失。而随着油气行业向深层发展,由井喷事故造成的安全隐患越来越大。全电控井下安全阀是一种安装在油气井内,在井口出现重大故障时能紧急关井,防止井喷、保障油气井生产安全的井下工具。
3.由于全电控井下安全阀运行在井下,通常采用整体提升的方式进行故障的诊断和定位,操作难度大,成本花费高。因此,亟需一种操作简单、诊断效率高的全电控井下安全阀旋转设备故障诊断方法及系统。
技术实现要素:
4.为克服现有技术存在的缺陷,本发明的目的在于提供一种全电控井下安全阀旋转设备故障诊断方法及系统。
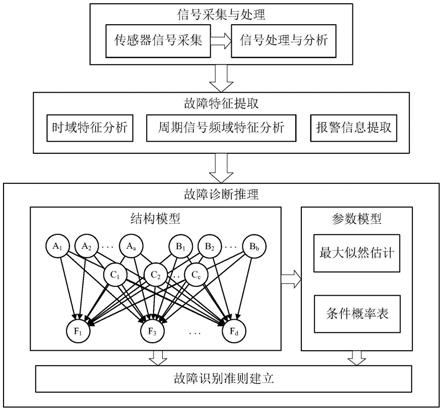
5.为实现上述目的,如图1所示,全电控井下安全阀旋转设备故障诊断方法,包含三个步骤:信号采集与处理、故障特征提取、故障诊断推理。
6.信号采集与处理的具体步骤为:
7.s101:通过布置在全电控井下安全阀阀体上的电磁制动器振动传感器、电磁离合器振动传感器、电机振动传感器、电磁制动器声发射传感器、电磁离合器声发射传感器、电机声发射传感器、温度传感器,压力传感器和电磁流量计,采集全电控井下安全阀阀体的振动信号、表面声波信号、温度信号、压力信号和井液流量信号;
8.s102:对振动信号和表面声波信号采用最小熵反褶积算法进行滤波降噪。
9.故障特征提取的具体步骤为:
10.s201:对振动信号、表面声波信号进行时域特征分析,提取时域信号的均方根、方差、峭度因子和脉冲因子形成4维时域特征数据;
11.s202:对振动信号、表面声波信号进行周期信号频域特征分析,提取频域信号的重心频域和均方频率形成2维周期信号频域特征数据;
12.s203:对温度信号、压力信号和井液流量信号进行监测阀值对比,提取报警信息特征。
13.故障诊断推理的具体步骤为:
14.s301:建立全电控井下安全阀旋转设备故障诊断推理贝叶斯网络结构模型,由故障特征值层和故障层组成;
15.s302:基于历史数据采用最大似然估计的方法进行贝叶斯网络参数学习,建立故障诊断推理贝叶斯网络参数模型,获得贝叶斯网络的条件概率表;
16.s303:计算各部件的故障概率并依据故障识别准则判断各组件是否处于故障状态。
17.全电控井下安全阀旋转设备故障诊断系统,包含两个部分:信号采集与处理子系统、信号传输与分析子系统。
18.信号采集与处理子系统,包括信号处理模块、传感器信号采集模块、阀体状态传感器组、电磁制动器传感器组、电磁离合器传感器组、电机传感器组;阀体状态传感器组,包括温度传感器、压力传感器和电磁流量计;电磁制动器传感器组,包括电磁制动器振动传感器和电磁制动器声发射传感器;电磁离合器传感器组,包括电磁离合器振动传感器和电磁离合器声发射传感器;电机传感器组,包括电机振动传感器和电机声发射传感器。
19.信号传输与分析子系统,包括信号收集模块、故障推理与诊断模块、故障显示与报警模块。
20.相对于现有技术,本发明的有效增益效果是:全电控井下安全阀旋转设备故障诊断方法及系统,其功能不仅包含全电控井下安全阀旋转设备故障和元件失效的诊断,而且还包含全电控井下安全阀阀体的泄漏与裂纹缺陷的检测,确保了井下生产系统的生产安全;通过从多源信息中提取故障特征,用于智能化综合故障诊断,具有很高的故障诊断准确度。
附图说明
21.图1是全电控井下安全阀旋转设备故障诊断方法示意图
22.图2是全电控井下安全阀旋转设备故障诊断推理贝叶斯网络结构模型示意图
23.图3是全电控井下安全阀旋转设备系统示意图
24.图4是全电控井下安全阀旋转设备故障诊断系统示意图
25.图中,101、井上控制模块,102、井上核心控制板,103、不间断电源,104、井上电力载波板卡,105、电力发送模块,106、井下控制模块,107、井下电力载波模块,108、电力接收模块,109、第一井下核心控制板,110、第二井下核心控制板,111、第三井下核心控制板,112、井下核心控制板模块,113、电机光耦开关,114、电磁离合器光耦开关,115、电磁制动器光耦开关,116、电机继电器,117、电磁离合器继电器,118、电磁制动器继电器,119、全电控井下安全阀阀体,120、电机,121、电磁离合器,122、电磁制动器,123、安全阀阀门,201、信号传输与分析子系统,202、故障显示与报警模块,203、故障推理与诊断模块,204、信号收集模块,205、信号采集与处理子系统,206、信号处理模块,207、传感器信号采集模块,208、阀体状态传感器组信号采集器,209、电磁离合器传感器组信号采集器,210、电机传感器组信号采集器,211、电磁制动器传感器组信号采集器,212、阀体状态传感器组,213、温度传感器,214、压力传感器,215、电磁流量计,216、电磁制动器传感器组,217、电磁制动器振动传感器,218、电磁制动器声发射传感器,219、电磁离合器传感器组,220、电磁离合器振动传感器,221、电磁离合器声发射传感器,222、电机传感器组,223、电机振动传感器,224、电机声发射传感器。
具体实施方案
26.如图1所示,全电控井下安全阀旋转设备故障诊断方法,包含三个步骤:信号采集
与处理、故障特征提取、故障诊断推理。
27.信号采集与处理的具体步骤为:
28.s101:通过布置在全电控井下安全阀阀体119上的电磁制动器振动传感器217、电磁离合器振动传感器220、电机振动传感器223、电磁制动器声发射传感器218、电磁离合器声发射传感器221、电机声发射传感器224、温度传感器213,压力传感器214和电磁流量计215,采集全电控井下安全阀阀体119的振动信号、表面声波信号、温度信号、压力信号和井液流量信号;
29.s102:对振动信号和表面声波信号采用最小熵反褶积算法进行滤波降噪,采集到的信号:
30.y(n)=h(n)*x(n) e(n)
31.其中,y(n)为采集信号,h(n)为系统传递函数,x(n)为真实信号,e(n)为背景噪声成分,对采集信号y(n)采用最小熵反褶积算法进行滤波降噪,如下所示:
[0032][0033]
其中,为输出序列,ω(n)为反褶积器,ω(n)将采集信号y(n)恢复成与真实信号x(n)相似的输出序列采用输出序列的范数衡量熵最大规则选取(nω(n),如下所示:
[0034][0035]
其中,为输出序列的范数衡量熵,x(i)为输出序列的第i项取值。
[0036]
故障特征提取的具体步骤为:
[0037]
s201:对振动信号、表面声波信号进行时域特征分析,提取时域信号的均方根、方差、峭度因子和脉冲因子形成4维时域特征数据;
[0038]
s202:对振动信号、表面声波信号进行周期信号频域特征分析,提取频域信号的重心频域和均方频率形成2维周期信号频域特征数据;
[0039]
s203:对温度信号、压力信号和井液流量信号进行监测阀值对比,提取报警信息特征。
[0040]
故障诊断推理的具体步骤为:
[0041]
s301:建立如图2所示的全电控井下安全阀旋转设备故障诊断推理贝叶斯网络结构模型,其由故障特征层和故障层组成。故障特征层节点取值由s201、s202和s203提取的故障特征输入,包括时域特征节点a1、a2、...、a
a
,周期信号频域特征节点b1、b2、...、b
b
,报警信息特征节点c1、c2、...、c
c
;故障层节点取值反应故障元件及类型,包括故障节点f1、f2、...、f
d
;
[0042]
s302:基于历史数据采用最大似然估计的方法进行贝叶斯网络参数学习,建立故
障诊断推理贝叶斯网络参数模型,获得贝叶斯网络的条件概率表:
[0043]
p(x1,x2,...,x
n
)=f(x1,x2,...,x
n
|θ)
[0044]
其中,x为构成贝叶斯网络的变量,n为构成贝叶斯网络的变量个数,f为其概率分布函数,θ为分布参数,似然函数为:
[0045][0046]
其中,x
i
为构成贝叶斯网络的第i个变量,对似然函数两边取自然对数:
[0047][0048]
对inl(θ)求导数并令之为0:
[0049][0050]
解此方程即可得到模型参数的最优估计。
[0051]
s303:计算各部件的故障概率并依据故障识别准则判断各组件是否处于故障状态。贝叶斯网络的输入为:
[0052]
p(i)=(p(a1),p(a2),...,p(a
a
),p(b1),p(b2),...,p(b
b
),p(c1),p(c2),...,p(c
c
))
[0053]
其中,p(i)为贝叶斯网络的输入,p(a1)、p(b1)、p(c1)分别为故障特征层节点a1、b1、c1的输入,各部件故障概率可由下式计算:
[0054][0055]
其中,p
f
为各部件的故障概率,p
p
为各部件发生故障的先验概率,p
c
为贝叶斯网络的条件概率表;
[0056]
故障识别准则如下所示:
[0057]
(1)当部件故障概率大于65%时认为该部件处于故障状态;
[0058]
(2)当部件故障概率处于35%和65%之间时认为该部件存在潜在故障;
[0059]
(3)当部件故障概率小于35%时认为该部件正常。
[0060]
如图3所示,全电控井下安全阀旋转设备系统,包括井上控制模块101、井下控制模块106和全电控井下安全阀阀体119;其中,井上控制模块101,包括井上核心控制板102、不间断电源103、井上电力载波板卡104和电力发送模块105;不间断电源103和井上电力载波板卡104通过线缆与井上核心控制板102相连,用于对井上核心控制板102进行电力和通讯传输;井下控制模块106,包括井下电力载波模块107、电力接收模块108、井下核心控制板模块112、电机光耦开关113、电磁离合器光耦开关114、电磁制动器光耦开关115、电机继电器116、电磁离合器继电器117、电磁制动器继电器118;井下电力载波模块107和电力接收模块108通过线缆与井下核心控制板模块112相连,用于对井下核心控制板模块112进行电力和通讯传输;电机光耦开关113和电机继电器116通过线缆相连,用于控制电机120;电磁离合器光耦开关114和电磁离合器继电器117通过线缆相连,用于控制电磁离合器121;电磁制动
器光耦开关115和电磁制动器继电器118通过线缆相连,用于控制电磁制动器122;全电控井下安全阀阀体119,包括电机120、电磁离合器121、电磁制动器122、安全阀阀门123;电机120、电磁离合器121和电磁制动器122三个动作装置通过机械结构相连,用于驱动和控制安全阀阀门123。
[0061]
如图4所示,全电控井下安全阀旋转设备故障诊断系统,包含信号采集与处理子系统205和信号传输与分析子系统201。
[0062]
信号采集与处理子系统205,包括信号处理模块206、传感器信号采集模块207、阀体状态传感器组212、电磁制动器传感器组216、电磁离合器传感器组219、电机传感器组222;阀体状态传感器组212,包括温度传感器213、压力传感器214和电磁流量计215,用于采集全电控井下安全阀阀体119的温度信号、压力信号和井液流量信号;电磁制动器传感器组216,包括电磁制动器振动传感器217和电磁制动器声发射传感器218,用于采集电磁制动器122的振动信号和表面声波信号;电磁离合器传感器组219,包括电磁离合器振动传感器220和电磁离合器声发射传感器221,用于采集电磁离合器的振动信号和表面声波信号;电机传感器组222,包括电机振动传感器223和电机声发射传感器224,用于采集电机的振动信号和表面声波信号;传感器信号采集模块207,通过信号线缆与阀体状态传感器组212、电磁制动器传感器组213、电磁离合器传感器组214、电机传感器组215相连,分别获取上述四个组件的反馈信号;信号处理模块206与传感器信号采集模块207通过信号线缆相连,对传感器信号采集模块207采集到的信号进行综合处理;信号处理模块206与井下电力载波模块107通过信号线缆相连,用于将信号处理模块206处理后的信号调质后,通过电力载波传输给信号收集与分析子系统201集中处理。
[0063]
信号传输与分析子系统201,包括故障显示与报警模块202、故障推理与诊断模块203、信号收集模块204;信号收集模块204通过信号线缆与井上电力载波板卡104相连,对信号进行解调收集;故障推理与诊断模块203,运行着全电控井下安全阀旋转设备故障诊断推理模型,通过读取信号收集模块204中的信号,提取故障特征信息,进行故障推理诊断,并利用故障识别准则得到故障诊断结果;故障显示与报警模块202,用于将故障推理与诊断模块203生成的故障诊断结果,通过界面显示和声音的形式进行故障报警。
[0064]
在工作过程中,信号采集与处理子系统205用于收集和处理全电控井下安全阀阀体119监测信息,并将信号通过电缆传输到信号传输与分析子系统201,信号传输与分析子系统201将读取全电控井下安全阀阀体119监测信息,提取故障特征信息,进行故障推理诊断,并利用故障识别准则得到故障诊断结果,通过界面显示和声音的形式进行故障报警。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

