1.本发明属于瞄准镜领域,即一种具有反伪装功能的智能光电跟踪瞄准镜。
技术背景
2.现在市面上的光电瞄准镜有单通道和多通道集成两种形式,单通道光电瞄准镜大致可以分为白光瞄准镜、数字微光瞄准镜、红外瞄准镜。白光瞄准镜在光线环境较好时成像锐利,细节丰富,但信息化程度不高,对于伪装目标基本靠观察者自身素养,不具备自动伪装识别能力;数字微光瞄准镜、红外瞄准镜能够在黑暗环境下使用,但高频光学频谱信息不足,成像质量细节不丰富,层次欠佳,伪装识别能力有限,智能识别跟踪功能实现难度大。
3.多通道集成主要采用白光与微光、或白光与红外等不同成像系统进行物理组合,不同波段光线分别进入对应的物镜,成像器件完成图像采集与处理,最后通过共用目镜完成观瞄。多通道集成方式在一定程度上实现了频谱信息融合互补,在复杂环境中,对伪装目标的识别、跟踪和瞄准等有效性有一定提升,但识别能力仍有进一步提升空间且体积较大,重量偏重。
技术实现要素:
4.为解决上述问题,本发明提出一种体积小、重量轻、具有反伪装功能的智能光电跟踪瞄准镜,瞄准镜采用偏振电视得到目标的多个角度的偏振信息,结合后端的图像处理算法,提升了目标的发现与自动识别概率,具有伪装识别的能力,提高了装备反伪装能力;解决了常规融合瞄准镜体积大,重量重等问题,实现了小型化、轻量化、高效化、低功耗的目标,有较强的应用价值。
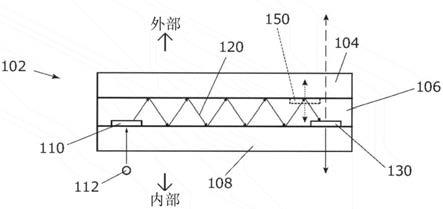
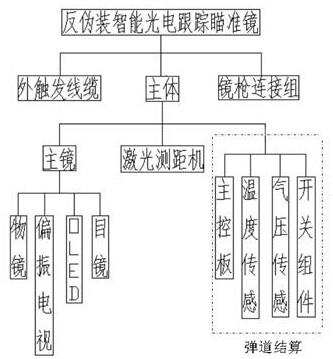
5.本发明采用如下技术方案实现:一种反伪装智能光电跟踪瞄准镜,包括物镜、激光保护玻璃、镜体、按键开关组件、目镜组、旋转操作组件;所述物镜、激光保护玻璃位于镜体前端,所述按键开关组件、旋转操作组件位于镜体上端,所述目镜组位于镜体后端,其特征在于,所述镜体内部安装有偏振电视、激光测距机模块、主控板、电池组件、气压温度传感器和oled组件。
6.所述主控板包括接口模块、存储模块和核心处理模块,偏振电视输出端、激光测距机模块输出端、oled组件输入端和外触发线缆信号端均通过接口模块连接在主控板上;存储模块用于储存识别、跟踪算法、分划信息、射表信息,系统运算与控制单元集成在核心处理模块上。
7.进一步地,所述分划信息包括曲线和数字,通过比对视场内的目标大小,可以进行简单测距,读取目标距离数据。
8.进一步地,所述射表信息包括距离数据、温度数据和气压数据,系统可通过激光测距机模块、气压温度传感器获取实时数据,结合射表信息进行自动装定射表。
9.进一步地,所述反伪装智能光电跟踪瞄准镜包括一个简易火控系统,该简易火控系统包括一个激光测距机模块和一个气压温度传感器,可迅速获取目标距离信息,结合环
境温度、气压数据,然后根据弹道信息计算出装表位置,并通过成像系统叠加显示于oled组件的显示屏上。
10.进一步地,所述核心处理模块上的系统运算包括目标识别和轮廓提取算法,该算法实现过程包括以下步骤:step1:输入的一帧图像,利用yolo的cnn网络将图像分割成n*n的网络单元,然后每个单元格负责去检测那些中心点落在该格子内的目标;step2:输入图像在网格中进行处理,每个网络单元格会预测b个边框,包括每个边框是目标的置信度,以及每个边框区域在多个类别上的概率;所述置信度包含两个方面:一是边界框含有目标的可能性大小,二是这个边界框的准确度。前者记为pr(object),当边界框为背景无目标时,pr(object)=0;当该边界框包括目标时,pr(object)=1。而后者边界框的准确度可以用预测框与实际框的交并比iou(intersection over union)来表征,记为因此置信度可以定义为边界框的大小和位置可以用4个值来表征:(x,y,w,h),其中(x,y)是边界框的中心坐标,而w和h是边界框的宽与高。中心坐标的预测值(x,y)是相对于每个单元格左上角坐标点的偏移值,而边界框的w和h预测值是相对于整个图片的宽与高的比例,这样理论上4个元素的大小应该在[0,1]范围。这样每个边界框的预测值实际上包含5个元素,即(x,y,w,h,c),其中前4个表征边界框的大小与位置,而最后一个值是置信度。
[0011]
每网络单元格还会预测出各个类别的概率值,其表征的是由该单元格负责预测的边界框其目标属于各个类别的概率,这些概率是在各个边框置信度下的条件概率,即pr(classi|object)。
[0012]
step3:根据step2可以预测出n*n*b个目标窗口,然后根据初始设定的阈值条件去除可能性比较低的目标窗口。
[0013]
step4:在step3操作基础上,利用非极大值抑制算法进行冗余单元去除,包括:首先从所有的检测框中找到置信度最大的那个框,然后挨个计算其余剩余框的iou,如果其值大于设定的阈值,其表示重合度过高,那么就将该框去除,然后对剩余的检测框重复上述操作,直到处理完所有的检测框。
[0014]
step5:去除冗余单元结束后,利用高精度目标轮廓提取算法对目标图像进行标轮廓提取增强。
[0015]
进一步地,所述镜体通过螺栓与接口组件固连,接口组件上安装有锁紧手柄,外触发线缆通过接插件联接在镜体上。
[0016]
进一步地,所述目镜组后侧安装有眼罩。
[0017]
与现有技术相比,本发明的优点在于:(1)采用常规成像镜头 偏振电视的模式,偏振电视以光线的偏振特征、偏振光栅原理分离不同偏振角度方向的光线,实现一次曝光即可以同时得到4个角度偏振光信息,结合后端的图像解算和融合处理,可以分离出当前视场内的偏振角度以及偏振态图像,最终形成具有偏振信息的电视信号。目标反射光线受到偏振光学器件调制后的光强图像,获取光束的偏振特性图像,能够提供更多维的关于场景中物体的材料、几何形状以及表面粗糙度等重要特征,滤除背景和其它无效信息,增强图像质量,从而提高人眼感官效果和伪装识别能力,实现“反伪装”。
[0018]
(2)采用偏振电视可探测光波波长400~1100nm的范围;而现有的一般狙击手配属光电产品,所使用的激光器波长大多为800~1064nm,本发明反伪装智能光电跟踪瞄准镜中采用的偏振电视,可以对发射激光光谱的光电产品进行探测和发现,快速发现敌方伪装狙击手,从而实现“反伪装”。
[0019]
(3)通过采用偏振电视,使得本发明瞄准镜体积减小、重量降低,瞄准点零位稳定性高。
[0020]
(4)通过目标轮廓提取与识别技术,实现智能识别跟踪功能。
附图说明
[0021]
图1为反伪装智能光电跟踪瞄准镜原理框图;图2为反伪装智能光电跟踪瞄准镜外观图;图3为反伪装智能光电跟踪瞄准镜内部构成图;图4为目标轮廓提取增强与识别算法的体系结构图。
[0022]
图中:1、物镜,2、激光保护玻璃,3、镜体,4、按键开关组件,5、目镜组,6、偏振电视,7、激光测距机模块,8、旋转操作组件,9、主控板,10、电池组件,11、气压温度传感器,12、oled组件,13、锁紧手柄,14、接口组件,15、外触发线缆,16、眼罩。
具体实施方式:
下面结合附图对本发明实施例中的技术方案,进行清楚、完整地描述。
[0024]
如图1
‑
3所示,一种反伪装智能光电跟踪瞄准镜,包括物镜1、激光保护玻璃2、镜体3、按键开关组件4、目镜组5、偏振电视6、激光测距机模块7、旋转操作组件8、主控板9、电池组件10、气压温度传感器11、oled组件12、锁紧手柄13、接口组件14、外触发线缆15、眼罩16。
[0025]
如图2和3所示,物镜1、激光保护玻璃2位于镜体3前端,按键开关组件4、旋转操作组件8位于镜体3上端,目镜组5位于镜体3后端,目镜组5后侧安装有眼罩16;镜体3内部安装有偏振电视6、激光测距机模块7、主控板9、电池组件10、气压温度传感器11和oled组件12;镜体3通过螺栓与接口组件14固连,接口组件14上安装有锁紧手柄13,外触发线缆15通过接插件联接在镜体3上;通过按键开关组件4和旋转开关组件8两个操控单元配合使用,可以与瞄准镜进行人机交互。
[0026]
主控板9包括接口模块、存储模块和核心处理模块,偏振电视6输出端、激光测距机模块7输出端、oled组件12输入端和外触发线缆15信号端均通过接口模块连接在主控板上;存储模块用于储存识别、跟踪算法、分划信息、射表信息,系统运算与控制单元集成在核心处理模块上。
[0027]
其中,分划信息包括曲线和数字,通过比对视场内的目标大小,可以进行简单测距,读取目标距离数据;射表信息包括距离数据、温度数据和气压数据,系统可通过激光测距机模块7、气压温度传感器11获取实时数据,结合射表信息进行自动装定射表。
[0028]
物镜1位于镜体3的前端,并成像在偏振电视6的探测器像面上;偏振电视6以光线的偏振特征,通过面阵探测器上的微纳米光栅结构对光束的偏振状态进行调制和采集,一次曝光即可以同时得到4个角度偏振光信息,结合后端的图像解算和融合处理,分离出当前视场内的偏振角度以及偏振态图像,形成偏振光电视信号。实现杂散光剔除,提高目标特征
识别率,可帮助滤除背景和其它的无效信息,增强图像质量,有效提高目标的识别能力,提升人眼感官效果和伪装识别能力。
[0029]
其中,偏振光电视可探测波长400~1100nm的光波,覆盖了现有瞄准镜中激光测距机模块工作波长范围800~1064nm。实际战场中,当伪装的狙击手通过瞄准镜的激光测距机模块对有生目标进行测距时,反伪装智能光电跟踪瞄准镜可以对其测距光斑进行探测和发现,从而快速发现敌方狙击手。
[0030]
偏振电视6信号传入到主控板9上,经过算法处理后图像信息传输到oled组件12中,此时将电信号转换为光信号显示在oled12屏幕上,最后经由目镜组件5将图像信息传到人眼。
[0031]
如图4所示,目标轮廓提取增强与识别算法的体系结构中,处理算法包括目标识别和轮廓提取算法,该算法实现过程包括以下步骤:step1:输入的一帧图像,利用yolo的cnn网络将图像分割成n*n的网络单元,然后每个单元格负责去检测那些中心点落在该格子内的目标;step2:输入图像在网格中进行处理,每个网络单元格会预测b个边框,包括每个边框是目标的置信度,以及每个边框区域在多个类别上的概率;所述置信度包含两个方面:一是边界框含有目标的可能性大小,二是这个边界框的准确度。前者记为pr(object),当边界框为背景无目标时,pr(object)=0;当该边界框包括目标时,pr(object)=1。而后者边界框的准确度可以用预测框与实际框的交并比iou(intersection over union)来表征,记为因此置信度可以定义为边界框的大小和位置可以用4个值来表征:(x,y,w,h),其中(x,y)是边界框的中心坐标,而w和h是边界框的宽与高。中心坐标的预测值(x,y)是相对于每个单元格左上角坐标点的偏移值,而边界框的w和h预测值是相对于整个图片的宽与高的比例,这样理论上4个元素的大小应该在[0,1]范围。这样每个边界框的预测值实际上包含5个元素,即(x,y,w,h,c),其中前4个表征边界框的大小与位置,而最后一个值是置信度。
[0032]
每网络单元格还会预测出各个类别的概率值,其表征的是由该单元格负责预测的边界框其目标属于各个类别的概率,这些概率是在各个边框置信度下的条件概率,即pr(classi|object)。
[0033]
step3:根据step2可以预测出n*n*b个目标窗口,然后根据初始设定的阈值条件去除可能性比较低的目标窗口。
[0034]
step4:在step3操作基础上,利用非极大值抑制算法进行冗余单元去除,包括:首先从所有的检测框中找到置信度最大的那个框,然后挨个计算其余剩余框的iou,如果其值大于设定的阈值,其表示重合度过高,那么就将该框去除,然后对剩余的检测框重复上述操作,直到处理完所有的检测框。
[0035]
step5:去除冗余单元结束后,利用高精度目标轮廓提取算法对目标图像进行标轮廓提取增强。
[0036]
本发明反伪装智能光电跟踪瞄准镜,包括一个由激光测距机模块7和一个气压温度传感器11组成的简易火控系统,通过操控外触发线缆15中的触发开关,能够迅速获取目标距离信息,结合环境温度、气压数据,然后根据弹道信息计算出装表位置,并通过成像系统叠加显示于oled组件12的显示屏上。射手只需要通过目镜组件5观察,并将装表分划瞄准
目标射击即可,这样较大地降低了射手计算工作量,提高了反应速度。
[0037]
工作原理:瞄准镜装入一节18650电池后锁好电池盖,长按按键开关组件4中的电源开关键,进行开机。操作旋转操作组件8,选择系统工作模式,当切换到智能模式时,视场内景象通过物镜1光学系统成像在偏振电视6的探测器像面上,随后图像信息传输给主控板9,主控板9通过识别、跟踪算法对图像信息进行处理,自动标识出伪装人员、车辆目标,并将处理后的图像传输到oled组件12上进行图像显示,人眼贴着眼罩16通过目镜组件5进行观察、识别;在选中打击目标后,操作外触发线缆15中的触发开关,对选定目标进行测距,系统根据距离信息和温度、气压信息完成自动装表,生成射击分划,此时将射击分划对准选定目标,进行射击即可。当操作旋转操作组件8中的旋钮开关将模式切换到人工模式时,可以调出包含曲线和数字的分划信息,通过比对视场内的目标大小,可以进行简单测距,读取目标距离数据,结合温度、气压信息完成手动装表。进一步操作旋转操作组件8中的旋钮开关,可以进行亮度、显示模式等参数的设置。
[0038]
整个瞄准镜通过接口组件14、锁紧手柄13和枪联接,整个瞄准镜由一节18650电池进行供电,按键开关组件进行开、关机,旋转操作组件进行工作模式选择和参数设置等。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。