1.本发明涉及一种基于车辆远光灯的车距计算方法,尤其是一种车辆远光灯判断、车辆远光灯在摄像头成像图片上的像素位置、视场内车辆远光灯实际位置及多个车辆之间的车距计算及车距变化等方法。
背景技术:
2.在夜间或光线较暗的环境下,对行驶中的车辆定位非常困难。远光灯作为夜间车辆行驶的重要特征,可以通过摄像头成像识别并锁定。通过摄像头成像图片上的远光灯像素点位置,可以推算出车辆的位置和车速,进一步可以计算多个车辆之间的距离,从而对在摄像头有效视场内的车辆行驶情况进行监测,不仅可以规范驾驶员的行为,还可以保证车辆的行驶安全。
3.为了规范驾驶员正确使用远光灯,安全驾驶,众多公司的科研机构、高校院所等大力投入研发,积极推动夜间道路远光灯的非法开启检测,识别和跟踪车辆远光灯,比如安徽超远公司、浙江安谐公司、青岛讯极公司、海康威视公司以及南京理工大学、西安理工大学、山东建筑大学等。然而,在对车辆的位置检测、车速检测以及车距检测等方面几乎没有太多的涉及。检测车辆在摄像头有效视场内的位置信息,进而推断速度和多车车距的情况,对于判定是否非法开启远光灯、是否文明驾驶,具有重要意义。
4.检测车辆位置的方法比较多,比如利用gps定位、回波检测等,都可以进行车辆位置及车距的检测。gps定位方法可以通过卫星定位自身,如需车管部门定位车辆还需增加必要的设备,增加成本,长期定位还在一定程度上侵犯车主隐私;回波检测通过在已知地点发送高频波,通过反射回波探测车辆的位置,但是对于复杂的路况,很难准确的测定行驶中的车辆位置。对于采用摄像头进行远光灯检测的条件下,通过摄像头拍摄图片,根据像素位置,推断车辆在有效视场内的位置,非常方便,且无需添加其他硬件设备,实用性强。
技术实现要素:
5.本发明的目的在于提供一种基于车辆远光灯的车距计算方法,通过摄像头对有效视场内的车辆进行拍摄,根据成像原理,推测远光灯开启车辆的位置,进而推断车辆的速度及多车车距信息,从而对驾驶员安全驾驶提供保证。主要包含以下几个步骤。
6.步骤1在摄像头有效视场范围内,识别并跟踪车辆远光灯。
7.车辆前照灯光束具有水平偏移角度不同的特点,向前照射的距离也不同。根据前照灯光束水平偏移角度和照射距离的特征,与近光灯相比,远光灯光束水平偏移的角度α较小,向前方照射的距离l较大,在拍摄图片上远光灯呈现较亮的圆斑,从而对远光灯识别并进行锁定跟踪。
8.步骤2根据远光灯照片像素位置,计算对应车辆在有效视场内的实际位置。
9.行驶在摄像头有效视场内的车辆,通过摄像头对远光灯捕捉,在底片上成像。由于底片尺寸与有效视场完全对应,根据摄像头成像原理,远光灯像素点在底片上的位置,在有
效视场内对应唯一一个实际远光灯位置,从而判断该车辆的实际行驶位置和行驶情况。
10.摄像头及有效视场环境如图2所示,根据已给的数值关系可知:。
11.则有:。
12.式中,h为摄像头竖直高度,d1为摄像头到有效视场的水平距离,d2为有效视场的长度范围,∠a和∠b分别为摄像头在d1和d2区域对应的角度。
13.当车辆远光灯在视场为的坐标为m0(x
m0
, y
m0
),对应于图3摄像头底片的坐标n0(x
n0
, y
n0
),那么:),那么:。
14.式中,δb为车辆远光灯对应的摄像头角度,步进小角度;l0为摄像头成像底片的长度。可以计算,车辆在有效视场内纵向坐标:。
15.根据图2与图3的对应关系,有:。
16.即:。
17.因此,车辆远光灯在有效视场内的位置坐标x
m0
和y
m0
即可确定,简写为x
m0 = f (x
n0
),y
m0 = f(y
n0
)。假设摄像头拍摄频率为f0,那么通过相邻两帧照片的像素坐标变化(δx
n
, δy
n
)即可求得车辆的横向和纵向速度v
x
和v
y
。
18.。
19.步骤3 判断车辆车距大小及跟踪车距变化。
20.根据拍摄图片上多个远光灯像素的位置,计算对应的多个车辆在有效视场内的实际位置,计算相邻车辆之间的车距大小及车距变化关系。
21.如果摄像头跟踪锁定的车辆远光灯代表的车辆多于1辆,在拍摄图片上留下代表
多个车辆的多个远光灯亮斑。根据拍摄图片上多个远光灯像素的位置,计算对应的多个车辆在有效视场内的实际位置,进而计算相邻车辆之间的车距大小及车距变化关系。
22.车辆1和车辆2的远光灯在摄像头底片中的坐标分别为n0(x
n0
, y
n0
), n1(x
n1
, y
n1
),那么有实际车辆坐标为m0(x
m0
, y
m0
), m1(x
m1
, y
m1
),满足下列条件:),满足下列条件:。
23.则车距大小为。
24.本发明的有益效果:可广泛应用于道路交通的车辆视频监测环境中,具有开发成本低、判别准确、易于维护等特点。
附图说明
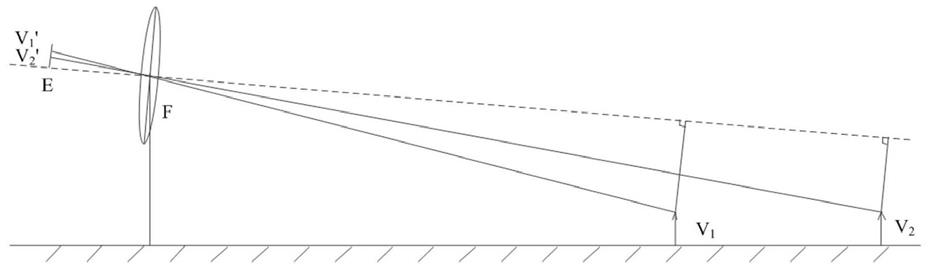
25.图1是车辆远光灯摄像头成像示意图。
26.图2 是车辆远光灯在有效视场内的角度和位置示意图。
27.图3是车辆远光灯在有效视场与照片中的对应关系示意图。
28.图4 是多个车辆远光灯在有效视场与照片关系示意图。
具体实施方式
29.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,结合附图及实施例,对本发明进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
30.如图1所示,所述的车辆v1和v2在行驶过程中进入摄像头的有效视场,通过摄像头在底片上成像v1'和v2',可见,距离摄像头近的v1成像在v1'靠近边缘,而距离摄像头远的v2成像在v2',相对靠近另一边缘,两个车辆的距离在底片上可以通过像素点v1'和v2'的差表示。
31.如图2所示,为摄像头场景的正视图,所述的摄像头的垂直高度为h,距离有效视场的范围为d1,对应的摄像头角度为∠a;有效视场范围为d2,对应的摄像头角度为∠b。当车辆远光灯m0在摄像头有效视场内时,对应的摄像头有效视场角度为δb。
32.如图3所示,为摄像头场景的俯视图,所述的摄像头的水平有效视场角度为∠c,对于有效视场内检测到的车辆远光灯m0(x
m0
, y
m0
),通过摄像头拍摄,对应拍摄底片上的n0(x
n0
, y
n0
),其对应关系满足函数关系m0=f(n0)。如果摄像头的图片拍摄频率为f0,则相邻两张图片的横向位移为δx
n
,纵向位移为δy
n
,那么横向速度为v
x
=f(δx
n
)
·
f0,纵向速度为v
y
=f(δy
n
)
·
f0。
33.如图4所示,为多辆车远光灯的俯视图,其中m0和m1分别表示两个车辆的远光灯,在摄像头有效视场内行驶,对应于摄像头底片的n0和n1像素点,那么两个车辆的实际距离,可以用底片上的二者之间的关系来表示,横向距离x=x
m1
‑
x
m0
=f(x
n1
‑
x
n0
),纵向距离y=y
m1
‑
y
m0
=f(y
n1
‑
y
n0
)。
34.因此,通过摄像头底片上的像素点的位置和距离,可以推断出实际远光灯的位置和距离,即实际车辆的位置和相对距离。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。