1.本发明涉及航天器轨道优化技术领域,具体地,涉及一种基于卫星三维成像的主动漂移多目标优化方法和系统。
背景技术:
2.三维成像技术在地质学、林学、生物量估计、考古学、冰川以及地下埋藏物体的探测方面都有着巨大的应用潜力。为了满足卫星三维成像对目标区域周期性观测和光照条件的要求,单星三维成像数据通常以太阳同步回归轨道的方式获取,频繁的轨道转移控制,势必会导致燃料消耗的增加,燃料消耗是卫星轨道转移任务中最为关注的问题,它直接决定了卫星的使用寿命,又由于航天器带入太空中的燃料有限,故设计燃料消耗最优的转移轨道,具有很好的现实意义。
3.专利文献cn105677942a(申请号:cn201510997982.0)公开了一种重复轨道星载自然场景sar复图像数据快速仿真方法,该方法模拟sar卫星运行轨道,根据星载sar卫星成像原理和sar卫星单视复图像信号模型对地面场景进行仿真,直接得到多幅重复轨道sar复图像数据。然而专利未对卫星运行的燃料消耗进行计算,不是很好的现实参考依据。
技术实现要素:
4.针对现有技术中的缺陷,本发明的目的是提供一种基于卫星三维成像的主动漂移多目标优化方法和系统。
5.根据本发明提供的基于卫星三维成像的主动漂移多目标优化方法,包括:
6.步骤1:建立参数约束下的太阳同步回归轨道参数表;
7.步骤2:检查表格并确定满足全球覆盖条件的所有标称轨道参数;
8.步骤3:对于每个标称轨道,确定基线长度范围内满足时间约束的所有过渡轨道参数,并获得所有可行解;
9.步骤4:计算可行解的总采样时间和燃料消耗,得到帕累托最优解集;
10.步骤5:选择满足时间约束的燃料偏好解作为下一次优化的初始值;
11.步骤6:以上一步的偏好解为基础,建立回归精度约束下的燃料优化模型,通过遗传算法生成初始种群,并初始化种群代数;
12.步骤7:分别以回归精度和燃料消耗为优化目标计算个体适应度值;
13.步骤8:根据差异概率选择优化目标,计算个体适应度值;
14.步骤9:判断选择的个体适应度值是否达到期望值或迭代次数是否达到终止条件,若满足,则输出优化结果,否则进行下一步操作;
15.步骤10:进行遗传算法选择操作;
16.步骤11:根据概率选择交叉操作的方式,进行遗传算法交叉操作;
17.步骤12:更新每种交叉方法被选择的概率;
18.步骤13:计算适应度值;
19.步骤14:判断适应度值是否达到期望值或迭代次数是否到达终止条件,若满足,则输出设计结果,否则进行下一步操作;
20.步骤15:进行遗传算法变异操作,并返回步骤7,进行下一次的迭代过程。
21.优选的,燃料消耗与转移轨道的速度增量对应,计算公式为:
[0022][0023][0024][0025][0026]
式中,表示从第k个工作轨道到第n个参考转移轨道的速度增量,表示从第n个参考转移轨道到第k 1个工作轨道到的速度增量,v
k
和v
k 1
分别为第k个、第k 1个工作轨道的速度;δv
total
表示总速度的改变量;m表示基线数;表示第1个参考转移轨道的速度;表示第k个标称轨道的半长轴;表示第1个转移轨道的半长轴。
[0027]
优选的,时间约束条件下的燃料优化模型为:
[0028][0029]
其中,δt
total
,δv
total
是目标函数;x1为可行解;x为可行解集合;minf()表示优化模型;n
nom
表示标称轨道的回归天数;n
s
表示数据采样的回归天数;表示标称轨道最小的回归天数;表示标称轨道最大的回归天数。
[0030]
优选的,回归精度约束下的燃料优化模型为:
[0031][0032][0033]
式中,x2为决策变量,是决策变量中各元素的取值范围,δr,δv
total
为
目标函数。
[0034]
优选的,采用轮盘赌的形式进行选择操作,以回归精度的倒数作为个体的适应度值,计算出所有个体的适应度总和,计算出每个个体的相对适应度大小,产生预设数量的0到1之间的随机数,并分别与每个个体的适应度值进行比较,确定每个个体被选择的概率。
[0035]
根据本发明提供的基于卫星三维成像的主动漂移多目标优化系统,包括:
[0036]
模块m1:建立参数约束下的太阳同步回归轨道参数表;
[0037]
模块m2:检查表格并确定满足全球覆盖条件的所有标称轨道参数;
[0038]
模块m3:对于每个标称轨道,确定基线长度范围内满足时间约束的所有过渡轨道参数,并获得所有可行解;
[0039]
模块m4:计算可行解的总采样时间和燃料消耗,得到帕累托最优解集;
[0040]
模块m5:选择满足时间约束的燃料偏好解作为下一次优化的初始值;
[0041]
模块m6:以模块m5的偏好解为基础,建立回归精度约束下的燃料优化模型,通过遗传算法生成初始种群,并初始化种群代数;
[0042]
模块m7:分别以回归精度和燃料消耗为优化目标计算个体适应度值;
[0043]
模块m8:根据差异概率选择优化目标,计算个体适应度值;
[0044]
模块m9:判断选择的个体适应度值是否达到期望值或迭代次数是否达到终止条件,若满足,则输出优化结果,否则调用模块m10;
[0045]
模块m10:进行遗传算法选择操作;
[0046]
模块m11:根据概率选择交叉操作的方式,进行遗传算法交叉操作;
[0047]
模块m12:更新每种交叉方法被选择的概率;
[0048]
模块m13:计算适应度值;
[0049]
模块m14:判断适应度值是否达到期望值或迭代次数是否到达终止条件,若满足,则输出设计结果,否则调用模块m15;
[0050]
模块m15:进行遗传算法变异操作,并调用模块m7,进行下一次的迭代过程。
[0051]
优选的,燃料消耗与转移轨道的速度增量对应,计算公式为:
[0052][0053][0054]
[0055][0056]
式中,表示从第k个工作轨道到第n个参考转移轨道的速度增量,表示从第n个参考转移轨道到第k 1个工作轨道到的速度增量,v
k
和v
k 1
分别为第k个、第k 1个工作轨道的速度;δv
total
表示总速度的改变量;m表示基线数;表示第1个参考转移轨道的速度;表示第k个标称轨道的半长轴;表示第1个转移轨道的半长轴。
[0057]
优选的,时间约束条件下的燃料优化模型为:
[0058][0059]
其中,δt
total
,δv
total
是目标函数;x1为可行解;x为可行解集合;minf()表示优化模型;n
nom
表示标称轨道的回归天数;n
s
表示数据采样的回归天数;表示标称轨道最小的回归天数;表示标称轨道最大的回归天数。
[0060]
优选的,回归精度约束下的燃料优化模型为:
[0061][0062][0063]
式中,x2为决策变量,是决策变量中各元素的取值范围,δr,δv
total
为目标函数。
[0064]
优选的,采用轮盘赌的形式进行选择操作,以回归精度的倒数作为个体的适应度值,计算出所有个体的适应度总和,计算出每个个体的相对适应度大小,产生预设数量的0到1之间的随机数,并分别与每个个体的适应度值进行比较,确定每个个体被选择的概率。
[0065]
与现有技术相比,本发明具有如下的有益效果:
[0066]
(1)本发明对于单星三维成像的任务需求,卫星需在基线方向进行多次轨道机动,提出的多参考转移轨道的过渡轨道方案能减小卫星机动的范围,从而降低燃料消耗;
[0067]
(2)本发明采用的两步优化策略,都对燃料消耗进行优化,能大幅度降低燃料消耗,对航天器在轨寿命的延长具有重要意义;
[0068]
(3)本发明采用的遗传算法多目标优化方法,多次根据目标函数的适应度动态调整相关参数,并根据差异概率选择不同的遗传交叉算法,可以保持种群的多样性和快速收敛,从而设计出符合任务要求的轨道。
附图说明
[0069]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0070]
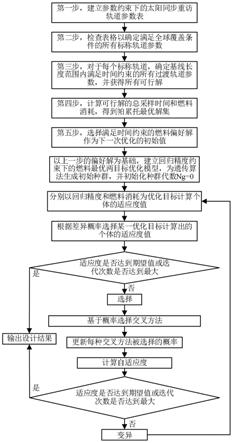
图1为本发明方法的流程图;
[0071]
图2为轨道高度方向、基线方向和雷达波束指向关系图;
[0072]
图3为帕累托最优解示意图;
[0073]
图4为第一步优化结果图;
[0074]
图5为sol.3第一个参考转移轨道下的收敛图;
[0075]
图6为sol.3第二个参考转移轨道下的收敛图;
[0076]
图7为sol.7第一个参考转移轨道下的收敛图;
[0077]
图8为sol.7第二个参考转移轨道下的收敛图。
具体实施方式
[0078]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0079]
实施例:
[0080]
如图1,根据本发明提供的一种基于多参考转移轨道的层析sar卫星轨道的多目标优化设计方法,具体包括以下步骤:
[0081]
步骤1:根据图2所示的卫星三维成像的轨道高度方向、基线方向和雷达波束方向的关系图,该三维成像卫星系统采用单星多航的形式,轨道高度方向为地心与卫星连线的直线,雷达波束指向为卫星载荷工作的波束方向,定义雷达波束指向直线与轨道高度直线之间的夹角为下视角,用α表示。基线与卫星波束方向垂直,以卫星为起点指向右上方。k=0,1,2,...,m,为工作轨道的编号,工作轨道即为进行数据采样的轨道,第0个工作轨道定义为标称轨道。
[0082]
按基线方向在空间的几何关系,设三维成像多基线单段长度为d,则基于投影变换理论,可建立基线与轨道变化量之间的量化关系,其中基线对应的轨道高度方向抬升量为:
[0083]
dis
latitude
=d
·
sinα
…………
(1)
[0084]
卫星在垂直于轨道高度方向(经度方向)上的偏移量为:
[0085]
dis
longitude
=d
·
cosα
…………
(2)
[0086]
设基线数目为m,则高程向孔径长度为:
[0087]
l=d
·
m
…………
(3)
[0088]
如果单一地在标称轨道和抬升段的工作轨道之间进行轨道转移,会产生较大的燃料消耗,且任务完成时间随着标称轨道的回归周期呈现线性递增关系。而在标称轨道的基
础上,可通过对多个参考转移轨道的优化设计,进一步降低燃料消耗量和任务完成时间,并能保障标称轨道的全球覆盖能力。
[0089]
步骤2:令(
·
)
nom
、分别表示标称轨道、第k个工作轨道和第j个参考转移轨道的轨道参数;表示从第k个工作轨道机动到第k个过渡轨道的霍曼椭圆;表示从第k个过渡轨道机动到第k 1个工作轨道的霍曼椭圆。a、e、i、ω、ω和m分别表示卫星轨道的半长轴、离心率、轨道倾角、升交点赤经、近地点幅角和平近点角,δv表示脉冲速度增量。
[0090]
标称轨道回归特性模型如下:
[0091][0092]
式中,n
nom
和r
nom
是互质整数,ω
e
是地球自转速率,τ
nom
是节点周期。假定标称轨道为圆轨道,则当a
nom
和i
nom
的组合使得标称轨道为太阳同步轨道。需指出,这里的轨道根数受摄变化情况均基于线性化j2项摄动模型。
[0093]
设卫星初始采样时刻的星下点经纬度为则第k次采样开始时刻的理想星下点位置可用式(5)(6)表示:
[0094][0095][0096]
在上述条件下,结合式(4)描述的标称轨道回归特性模型,参考转移轨道应满足下述条件:
[0097][0098]
式中,δω为基于角度描述的经度方向的漂移量。
[0099]
工作轨道和过渡轨道均和标称轨道等偏心率、等倾角。考虑霍曼变轨方式。一个采样周期内卫星在经、纬度方向上的角运动量分别为:
[0100][0101][0102]
如果每n
s
天进行一次层析数据采样,且要同时符合式(5)描述的经度方向漂移特性、式(6)描述的纬度方向回归特性,则有下式成立:
[0103][0104][0105]
式中,n
s
和r
s
均为整数。
[0106]
步骤3:为规避多维优化目标的同时处理,面向单星tomosar轨道主动转移多目标优化设计问题,提出了一种目标解耦的分步逐层优化策略。三个目标被分解成两步优化,由于燃料消耗在tomosar轨道转移任务中的重要性,两步优化都将燃料消耗作为优化目标。第一步应用pareto最优解思想计算满足时间约束和燃料最优的轨道初值;第二步以第一步得
到的初值为基础,在满足回归约束的条件下进一步优化燃料消耗,得到多个过渡轨道的最优半长轴。
[0107]
第一步优化中,为了减小计算资源消耗,将广域连续时间的多参考转移轨道半长轴的连续型优化求解问题转化为离散时间回归天数的初值计算问题,优化模型建立如下:
[0108][0109]
其中,δt
total
,δv
total
是目标函数,x1为可行解,x为可行解集合。
[0110]
对于目标函数δt
total
而言,在变量空间中找不到其他的解优于δt
total
,那么δt
total
是pareto最优解,同理,在变量空间中找不到其他的解优于δv
total
,那么δv
total
是pareto最优解。
[0111]
步骤4:建立参数约束下的太阳同步回归轨道参数表;检查表格以确定满足全球覆盖条件的所有标称轨道参数;对于每个标称轨道,确定基线长度范围内满足时间约束的所有过渡轨道参数,并获得所有可行解;计算可行解的总采样时间和燃料消耗,得到帕累托最优解集;选择满足时间约束的燃料偏好解作为下一次优化的初始值。帕累托最优解示意图如图3所示。
[0112]
步骤5:以第一步优化得到的参考转移轨道半长轴确定过渡轨道半长轴的搜索空间。在第二步优化中,回归精度和燃料消耗被作为目标函数,优化问题的数学模型为:
[0113][0114]
式中,为决策变量,是x2中每维变量的取值范围。针对此两目标优化问题,选择遗传算法优化求解。随机生成初始化种群。
[0115]
步骤6:分别以回归精度和燃料消耗作为优化目标计算个体的适应度值;
[0116]
步骤7:根据差异概率选择某一优化目标计算出的适应度值;
[0117]
步骤8:判断自适度值是否达到期望值,或者迭代次数达到终止条件,若是,输出轨道设计结果,若否进行下一步操作;
[0118]
步骤9:进行选择操作。在每一代采用差异概率方法选择某一目标函数值,这里假设选定回归精度。采用轮盘赌的方法进行选择操作,对于回归精度和燃料消耗两目标优化问题,具体描述如下所述:
[0119]
(1)以回归精度的倒数作为个体的适应度值,计算出所有个体的适应度总和;
[0120]
(2)计算出每个个体的相对适应度大小;
[0121]
(3)产生np个0到1之间的随机数,并分别与每个个体的适应度值进行比较,确定每个个体被选择的概率。
[0122]
步骤10:进行交叉操作。交叉操作是遗传算法中最主要的遗传操作,使用改进的混合交叉策略。首先,采用自适应的方法选择交叉概率pc。
[0123]
如果f
g
小于f
avg
,那么:
[0124]
pc
g
=(pc3×
(f
avg
‑
f
g
) pc2×
(f
g
‑
f
min
))/(f
avg
‑
f
min
),g=1,...,maxgen
…………
(14)
[0125]
否则:
[0126]
pc
g
=(pc2×
(f
max
‑
f
g
) pc1×
(f
g
‑
f
avg
))/(f
max
‑
f
avg
),g=1,...,maxgen
…………
(15)
[0127]
其中,f
g
为第g代的最大回归误差,f
avg
、f
min
和f
max
分别为前g代的平均回归误差、最小回归误差和最大回归误差,maxgen为进化总代数。
[0128]
交叉操作具体步骤描述如下:
[0129]
(1)纯策略集合记为{1,2,3},分别代表模拟二进制交叉算子,非均匀算术交叉和引导交叉算子。
[0130]
(2)初始化,产生由u个个体组成的初始种群。对每个个体i,为混合策略向量分配初始的概率分布,ρ
i
={ρ
i
(1),ρ
i
(2),ρ
i
(3)}。
[0131]
(3)对每个个体i,根据混合策略ρ中的概率选择一种交叉策略h,根据选择的策略进行交叉,产生子代,相关交叉策略如下:
[0132]
模拟二进制交叉算子(sbx):假设发生交叉的两基因值分别为k1、k2,则交配产生的新值为:
[0133][0134]
非均匀算术交叉:
[0135][0136]
引导交叉算子:
[0137]
如果父代的回归误差大于子代的回归误差,那么:
[0138][0139]
否则:
[0140][0141]
式(16)(17)(18)(19)中,β
c
为交叉比例系数,其计算方法为:
[0142][0143]
式中,η
c
为分布控制参数,通常取η
c
=20。
[0144]
按如下方法更新子代混合策略概率:
[0145]
采用的交叉纯策略为h,h∈{1,2,3},比较父代和子代每个个体适应度值,如果子代优于父代的个体数目较多,那么加强这个纯策略:
[0146][0147]
否则,减弱这个纯策略:
[0148][0149]
λ用来调整混合策略的概略分布,首先等概率的选择某一个体交叉后某一优化目标的适应度值与交叉前进行比较,若交叉前适应度值大,则count值加1,λ可用下式计算:
[0150]
λ=(b
‑
a)(1
‑
count/n) a
…………
(23)
[0151]
式中,count为父代优于子代的个体数目,n为种群大小,λ∈[a,b]。
[0152]
步骤11:计算交叉操作后个体的适应度值。
[0153]
步骤12:判断个体的适应度值是否达到期望值或迭代次数是否达到终止条件,若是,输出轨道设计结果,否则转步骤6以进入遗传算法的下一轮迭代过程。
[0154]
下面结合实施例对本发明做进一步详细的描述。
[0155]
设层析成像任务的相关参数如表1所示;第一层优化的轨道参数取值范围如表2所示。
[0156]
表1三维成像任务的仿真参数
[0157]
参数数值单位l15(km)m15
‑
α30(
°
)
[0158]
表2轨道参数的优化范围
[0159]
参数最小值最大值单位n
nom
1630(day)n
s
110(day)a
nom
6578.1377178.137(km)
[0160]
第一层的优化结果如图4所示,得到的pareto最优解集中共有7个解(分别记为sol.1~sol.7)。选取sol.3和sol.7为偏好解,这两个解的轨道参数如表3所示。
[0161]
表3pareto最优解的轨道参数
[0162][0163][0164]
在第二层优化中,遗传算法的相关参数如表4所示。
[0165]
表4遗传算法的仿真参数
[0166]
参数数值单位n
p
120
‑
n
g
180
‑
pm0.1
‑
mu20
‑
mum20
‑
[0167]
对于多参考转移轨道方法,以sol.3和sol.7作为第二步优化的输入,收敛区间分别为(7043.565km,7044.665km)和(7045.138km,7046.138km),算法的收敛过程如图5、图6、图7和图8所示。
[0168]
过渡轨道的最终设计值如表5所示。
[0169]
表5过渡轨道的设计结果
[0170][0171]
综上所述,本发明的一种基于多参考转移轨道的卫星三维成像主动漂移的多目标优化设计方法通过pareto最优和改进的遗传算法两步优化,给出了在回归精度和重访时间约束条件下的燃料最优的转移轨道参数设计,对于节省燃料,提高卫星寿命,增加在轨服务时间,具有重要意义。
[0172]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
[0173]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

