基于coselm算法的发动机辅助动力装置控制系统传感器解析余度方法
技术领域
1.本发明属于航空发动机辅助动力装置控制系统传感器故障诊断和信号重构技术领域,尤 其涉及基于coselm(covariance online sequence extreme learning machine)算法的发动机 辅助动力装置控制系统传感器解析余度方法。
背景技术:
2.辅助动力装置是装在飞机上的一套不依赖机外任何能源、自成体系的小型燃气涡轮发动 机。apu作为飞机上一个重要的子系统,不仅可以为飞机提供电、气和液压等能源,同时在 飞机上起飞时,为发动机提供推力,若发生空中停车,apu也可以重启发动机。因此,对于 apu的当前运行状态必须实时监测,以保证apu能够可靠稳定的运行。传感器作为获取发 动机状态信息的主要渠道,其信号的准确性是发动机控制、性能监测与诊断的前提条件。目 前,提高发动机传感器工作可靠性方法主要有两种:硬件余度和解析余度。硬件余度通常是 利用多个传感器测量一个信号,当其中一个信号发生故障时,可采用其它传感器信号代替, 硬件余度的方法会造成控制系统复杂,系统重量上升。解析余度技术主要是在传感器硬件余 度都发生故障时,根据被控对象的数学模型估计出待测参数,用估计值作为余度信息,代替 传感器的测量值。
3.近年来,随着人工智能技术的发展,以神经网络为代表的机器学习算法应用于发动机传 感器解析余度中。其中,极限学习机(extreme learning machine,elm)作为一种单隐层神经 网络,不同于传统的bp算法,其输出权值由最小二乘法求解。因此,elm算法具有训练速 度快的优点。然而,elm算法的训练方式是通过离线过程完成的,无法处理大量在线数据流 的问题。于是,liang等人依据递推最小二乘法的原理提出了在线序列极限学习机算法(onlinesequence extreme learning machine,oselm),将离线的极限学习机推广到在线训练,根据 新来的数据在线实时更新网络输出权重。但是,oselm算法同样由于输入权重随机生成,从 而会导致算法结果的不稳定性。lan通过集成多个oselm模型,然后将各个子模型的预测 值通过等权平均法加权求和得到最终模型预测值,在一定程度上克服克服了算法结果不稳定 的缺点。然而,通过等权平均法使得各单项模型对于预测结果的贡献和影响相同。
4.考虑到在实际过程中,各个单一模型的预测效果不尽相同,简单的等权平均不能充分利 用各个模型的有用信息。基于自适应集成网络的思想,本发明提出了一种协方差优化集成极 限学习网络算法模型的方法并将其命名为coselm。该方法能够根据当前时刻预测值和真实 值的预测误差,自适应调整网络每个子模型的输出权重系数,以发挥各个单一模型的预测优 势,增强算法的稳定性和泛化性。在此基础上,本发明提出了基于coselm算法的发动机辅 助动力装置控制系统传感器解析余度方法,仿真结果表明提出的coselm方法可以解决传感 器在发生偏置故障时的信号重构问题,适用于不同发动机个体,为其提供可靠的解析余度。
技术实现要素:
5.针对上述技术问题,本发明提出了基于coselm算法的发动机辅助动力装置控制系统传 感器解析余度方法,针对单个oselm模型由于输入权重系数的随机性导致预测效果不稳定, 基于自适应集成网络的思想,采用协方差优化的方法在线实时更新集成网络权重系数,针对 apu传感器故障诊断和故障信号重构问题,设计了基于coselm算法的传感器解析余度方 法,仿真结果表明该方法可以有效的识别传感器故障,适用于不同辅助动力装置个体,为其 提供可靠的解析余度,为航空发动机控制系统安全可靠的运行提供保障。
6.技术方案:为实现上述目的,本发明采用的技术方案为:
7.基于coselm算法的发动机辅助动力装置控制系统传感器解析余度方法,包括以下步骤:
8.步骤1),建立基于coselm算法的航空发动机辅助动力装置压气机后温度t3、压气机 出口压力p3、涡轮后压力p5和转速n四个传感器信号预测模型;
9.步骤2),采用协方差优化的方法在线更新coselm网络拓扑参数;
10.步骤3),根据wssr准则进行传感器故障信号在线识别;
11.步骤4),通过coselm算法进行传感器故障隔离和信号重构。
12.进一步的,所述步骤1)中建立基于coselm算法的航空发动机辅助动力装置压气机出 口温度t3、压气机出口压力p3、涡轮出口压力p5和转速n四个传感器信号预测模型具体步 骤如下:
13.步骤1.1),将apu传感器参数进行归一化处理,所述apu传感器参数包括压气机出口 温度t3、压气机出口压力p3、涡轮出口压力p5和转速n;
14.步骤1.2),针对每一个apu传感器参数,建立基于coselm算法的传感器信号预测模 型,具体表达式为:
15.t3预测模型:
[0016][0017]
p3预测模型:
[0018][0019]
p5预测模型:
[0020][0021]
n预测模型:
[0022][0023]
其中,m表示预测步长,t表示当前时刻,wf表示燃油量,f表示非线性函数,表示coselm 算法的预测值。
[0024]
进一步的,所述步骤2)中采用协方差优化的方法在线更新coselm网络拓扑参数具体 步骤如下:
[0025]
步骤2.1),由已知的四个传感器的数据和供油量数据构建训练样本s表示样本数,n表示输入数据的维度,v表示输出 数据的维度,隐含层激活函数为g(x),隐含层个数为l,集成网络个数p,初始化系数矩阵α;
[0026]
步骤2.2),根据第t时刻的传感器数据和供油量数据,分别训练i个oselm网络拓扑参 数,1≤i≤p;
[0027]
步骤2.3),采用协方差优化在线实时更新第t时刻第i个oselm网络的权重系数
[0028]
步骤2.4),计算coselm网络在第t时刻的输出为:
[0029][0030]
进一步的,步骤2.2)中所述根据第t时刻的传感器数据,分别训练i个oselm集成网 络拓扑参数具体步骤如下:
[0031]
步骤2.2.1),根据训练样本随机生成输入权值 w以及隐含层偏置b,计算隐含层输出矩阵h0:
[0032][0033]
其中,n0为初始化样本数量,w=[w1,w2,...,w
l
]
t
,b=[b1,b2,...,b
l
]
t
;
[0034]
步骤2.2.2),计算oselm网络的初始输出权值:
[0035][0036][0037]
其中,为网络的期望输出,p0为算法迭代中的增益项的初始值,β0为网络 的初始输出权重;
[0038]
步骤2.2.3),根据递推最小二乘法,则第t时刻相应的输出权重为:
[0039][0040][0041]
其中,p
t
‑1为前一时刻的增益项,β
t
‑1为前一时刻所得到的输出权值;
[0042]
步骤2.2.4),设置t=t 1,返回步骤2.2.3),直到所有样本训练结束。
[0043]
进一步的,步骤2.3)中所述采用协方差优化在线实时更新第t时刻集成网络的权重系数 具体步骤如下:
[0044]
步骤2.3.1),实时在线采集第t时刻四个传感器的数据和供油量数据构建样本,计算第t 时刻p个oselm网络的预测值
[0045]
步骤2.3.2),第t时刻coselm网络的组合预测表示为:
[0046][0047][0048]
其中,为第p个oselm网络在第t时刻的预测值;
[0049]
步骤2.3.3),第t时刻coselm网络预测误差的方差为:
[0050][0051]
其中,var为模型预测误差的方差,cov为模型预测误差的协方差;
[0052]
步骤2.3.4),由于各个预测网络模型的预测结果相互独立,所以协方差等于零,则步骤 2.3.3)中的函数简化为:
[0053][0054]
其中,σ
i
为预测误差的方差;
[0055]
步骤2.3.5),引入拉格朗日乘子对目标函数var(e
t
)求最小值,即得第t时刻coselm网 络的权重更新系数为:
[0056][0057]
进一步的,所述步骤3)中根据wssr准则进行传感器故障信号在线识别具体步骤如下:
[0058]
步骤3.1),分别用传感器测量值替换coselm网络预测值,计算第t时刻相对应的wssr, 计算如下:
[0059][0060][0061]
其中,表示为第j个传感器在t时刻的测量值,传感器表示为网络在第j个传感器t时刻 的预测值,∑表示为传感器的噪声水平;
[0062]
步骤3.2),选取适合的λ值,如果没有故障发生,则所有的wssr均低于λ;如果第j个 传感器故障,则与故障传感器对应的第j行的wssr将低于λ,另外的j
‑
1行的wssr将高于 λ。
[0063]
进一步的,所述步骤4)中通过coselm算法进行传感器故障隔离和信号重构具体步骤 如下:
[0064]
步骤4.1),若所有的wssr都小于设定的λ值,则没有传感器发生故障,采用测量值作 为传感器重构信号;
[0065]
步骤4.2),若第j个传感器对应的wssr低于λ值,其余j
‑
1个传感器都高于λ值,则隔 离第j个传感器,采用coselm算法预测值作为传感器重构信号。
[0066]
有益效果:1、本发明提出的coselm算法解决了oselm算法中由于输入权重随机性 导致学习效果不稳定的问题。
[0067]
2、本发明提出的采用协方差优化的方法在线更新集成网络的权重系数,克服了等
权加权 中各单个预测模型对于预测结果相同的缺点,发挥了各单个预测模型的优势。
[0068]
3、本发明设计的基于coselm算法的发动机辅助动力装置控制系统传感器解析余度方 法,可以有效的识别传感器故障并在线重构传感器信号,适用于不同辅助动力装置个体,为 航空发动机控制系统安全提供保障。
附图说明
[0069]
图1是航空发动机辅助动力装置气路工作截面标识图。
[0070]
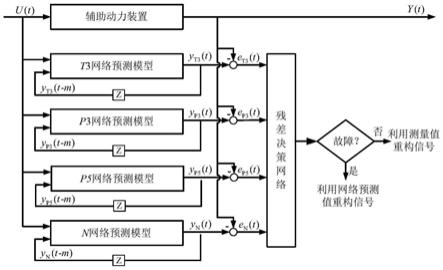
图2是本发明提出的发动机辅助动力装置控制系统传感器解析余度方法结构示意图
[0071]
图3是基于coselm算法的网络结构图。
[0072]
图4是基于wssr的传感器信号故障诊断与重构准则图
[0073]
图5是回归数据集上的测试集cv值结果图。
[0074]
图6是t3传感器发生偏置故障时传感器信号重构结果图。
[0075]
图7是t3和p3传感器发生偏置故障时传感器信号重构结果图。
[0076]
图8是p3和p5传感器发生偏置故障时传感器信号重构结果图。
具体实施方式
[0077]
下面结合附图对本发明的具体实施方式作更进一步的说明。
[0078]
本发明说明的基于coselm算法的发动机辅助动力装置控制系统传感器解析余度方法, 具体包括以下步骤:
[0079]
步骤1),建立基于coselm算法的航空发动机辅助动力装置压气机后温度t3、压气机 出口压力p3、涡轮后压力p5和转速n四个传感器信号预测模型。
[0080]
步骤1.1),将apu传感器参数进行归一化处理,所述apu传感器参数包括压气机出口 温度t3、压气机出口压力p3、涡轮出口压力p5和转速n;
[0081]
步骤1.2),针对每一个apu传感器参数,建立基于coselm算法的传感器信号预测模 型,具体表达式为:
[0082]
t3预测模型:
[0083][0084]
p3预测模型:
[0085][0086]
p5预测模型:
[0087][0088]
n预测模型:
[0089]
[0090]
其中,m表示预测步长,t表示当前时刻,wf表示燃油量,f表示非线性函数,表示coselm 算法的预测值。
[0091]
步骤2),采用协方差优化的方法在线更新coselm网络拓扑参数。
[0092]
步骤2.1),由已知的四个传感器的数据和供油量数据构建训练样本s表示样本数,n表示输入数据的维度,v表示输出 数据的维度,隐含层激活函数为g(x),隐含层个数为l,集成网络个数p,初始化系数矩阵α;
[0093]
步骤2.2),根据第t时刻的传感器数据和供油量数据,分别训练i个oselm网络拓扑参 数,1≤i≤p;
[0094]
步骤2.2.1),根据训练样本随机生成输入权值 w以及隐含层偏置b,计算隐含层输出矩阵h0:
[0095][0096]
其中,n0为初始化样本数量,w=[w1,w2,...,w
l
]
t
,b=[b1,b2,...,b
l
]
t
;
[0097]
步骤2.2.2),计算oselm网络的初始输出权值:
[0098][0099][0100]
其中,为网络的期望输出,p0为算法迭代中的增益项的初始值,β0为网络 的初始输出权重;
[0101]
步骤2.2.3),根据递推最小二乘法,则第t时刻相应的输出权重为:
[0102][0103][0104]
其中,p
t
‑1为前一时刻的增益项,β
t
‑1为前一时刻所得到的输出权值;
[0105]
步骤2.2.4),设置t=t 1,返回步骤2.2.3),直到所有样本训练结束。
[0106]
步骤2.3),采用协方差优化在线实时更新第t时刻第i个oselm网络的权重系数步骤2.3.1),实时在线采集第t时刻四个传感器的数据和供油量数据构建样本,计算第t时刻 p个oselm网络的预测值
[0107]
步骤2.3.2),第t时刻coselm网络的组合预测表示为:
[0108][0109][0110]
其中,为第p个oselm网络在第t时刻的预测值;
[0111]
步骤2.3.3),第t时刻coselm网络预测误差的方差为:
[0112][0113]
其中,var为模型预测误差的方差,cov为模型预测误差的协方差;
[0114]
步骤2.3.4),由于各个预测网络模型的预测结果相互独立,所以协方差等于零,则步骤 2.3.3)中的函数简化为:
[0115][0116]
其中,σ
i
为预测误差的方差;
[0117]
步骤2.3.5),引入拉格朗日乘子对目标函数var(e
t
)求最小值,即得第t时刻coselm网 络的权重更新系数为:
[0118][0119]
步骤3),根据wssr准则进行传感器故障信号在线识别。
[0120]
步骤3.1),分别用传感器测量值替换coselm网络预测值,计算第t时刻相对应的wssr, 计算如下:
[0121][0122][0123]
其中,表示为第j个传感器在t时刻的测量值,传感器表示为网络在第j个传感器t时刻 的预测值,∑表示为传感器的噪声水平;
[0124]
步骤3.2),选取适合的λ值,如果没有故障发生,则所有的wssr均低于λ。如果第j个 传感器故障,则与故障传感器对应的第j行的wssr将低于λ,另外的j
‑
1行的wssr将高于 λ。
[0125]
步骤4),通过coselm算法进行传感器故障隔离和信号重构。
[0126]
步骤4.1),若所有的wssr都小于设定的λ值,则没有传感器发生故障,采用测量值作 为传感器重构信号;
[0127]
步骤4.2),若第j个传感器对应的wssr低于λ值,其余j
‑
1个传感器都高于λ值,则隔 离第j个传感器,采用coselm算法预测值作为传感器重构信号。
[0128]
为了验证本发明所设计的基于coselm算法的发动机辅助动力装置控制系统传感器解 析余度方法的有效性,数字仿真是在inter(r)core(tm)i7
‑
9750h cpu@2.60ghz环境下,使 用matlab2018b作为研究工具下进行的。
[0129]
首先,选用uci机器学习数据库中的回归数据集auto
‑
mpg,bike
‑
sharing,space
‑
ga, cpu
‑
small,wine
‑
quality以及boston
‑
housing作为对比数据集来验证所提coselm算法性能 的稳定性和有效性。回归数据集的基本信息如表1所示。
[0130]
表1回归数据集基本信息
[0131][0132]
将所有训练数据和测试数据都归一化到[0,1]区间内,对于每个数据集进行10次重复实验, 为了便于比较,定义性能指标:
[0133][0134]
其中,y
s
为第s个样本的真实值,为第s个样本算法的预测值,rmse为均方根误差,反 映算法的预测精度以及稳定性。仿真结果如表2所示。
[0135]
表2回归数据集仿真结果
[0136][0137][0138]
结合图5和表2可以看出,在标准数据集上,coselm算法的训练耗时明显高于oselm 算法,这是由于计算量增加所导致的。coselm算法在各个回归数据集上的cv值都低于 oselm算法,体现了coselm算法具有更好的稳定性,从而克服了oselm算法中由于输 入权重随机性导致学习效果不稳定的问题。
[0139]
然后,在某型apu模型使用同样配置计算机进行相关数字仿真。在模拟传感器故障
的过 程中,采用如下函数来模拟偏置故障:
[0140]
y
t
'=y
t
b(t0)
[0141]
其中,b为常数,表示偏置故障的幅值大小,t0表示故障的发生时刻,y
t
表示某一传感器该时 刻的真实值,y
t
'表示该传感器的测量值。
[0142]
本发明采用wssr准则来进行传感器的故障定位,基于wssr的传感器信号故障诊断与 重构准则如图4所示。首先判断是否为同一台apu,如果不是同一台apu,则需要重新用新 apu数据初始化网络权重参数,并进行在线预测计算估计信号;如果是相同apu,则进行相 应传感器故障定位。若没有故障发生,则所有的wssr均低于λ。若第j个传感器故障,则 与故障传感器对应的第j行的wssr将低于λ,另外的j
‑
1行的wssr将高于λ。
[0143]
本发明此次仿真的条件为:高度h=0、马赫数ma=0,供油量在80%
‑
100%之间,仿真时 长为180s。对于所有的传感器参数都进行了归一化处理,并加入了均值为0、方差为0.00152的高斯白噪声,以模拟传感器的真实情况。对于每个预测模型,选取隐含层激活函数为sigmoid, 根据试验法设置隐含层神经元的个数为20。本文在进行仿真时根据实验选择阈值λ为100, 既保持了系统对于噪声的容错能力,又可以准确的定位传感器的故障位置。在t=105s时对于 t3增加3%的偏置故障,并在t=150s后撤销故障的仿真结果如图6所示。为了进一步验证系 统在不同时刻传感器发生故障的诊断能力,在t=75s和t=98s分别对t3和p3注入3%的偏置 故障,仿真结果如图7所示。同时为了验证所提coselm算法对于不同发动机个体的传感器 故障诊断效果,在相同工作状态下,在t=110s时接入另一发动机apu,此时由于发动机个体 差异,前发动机的数据已经不能作为网络输入,因此需用新发动机apu的传感器数据用来初 始网络权重参数,并进行传感器故障诊断以及信号重构。在t=75s时在原型号apu对p3注 入3%的偏置故障并在t=90s撤销该故障,同时在另一发动机apu上当t=150s时对p5注入 3%的偏置故障并直到仿真结束,仿真结果如图8所示。各个传感器发生故障时的预测均方根 误差如表3所示。
[0144]
表3传感器偏置故障时的诊断结果
[0145][0146]
由图6中(b)可以看出,在t3传感器发生偏置故障后,系统的输出切换到网络预测值, 并且能够准确跟踪传感器的真实值,而其他未发生故障的传感器则没有受到故障传感
器的影 响,能够和测量值保持一致。由图7中(b)和(d)可以看出,在传感器故障发生后,各个预测模 型能够准确识别出发生偏置的传感器,并能够很好地跟踪及时重构信号。由图8中(d)和(f)可 以看出,在原型号apu上p3传感器发生故障时,能够迅速识别发生故障的传感器并进行信 号重构,同时网络在线对于另一apu上p5传感器的偏置故障能够及时诊断,并能准确重构 信号,表明了算法有着较好的在线学习能力,能够适应不同发动机个体上的传感器故障诊断 并及时重构出准确信号,为控制系统提供保障。通过表3可以看出,对于发生故障的传感器, 误差相较于其他未发生故障的传感器误差会有明显的增大,这是由于传感器此时发生偏置故 障造成预测误差突变所造成的,此时采用算法预测值进行信号重构。
[0147]
由仿真结果可以看出,本发明提出的coselm算法可以有效的解决oselm算法中由于 输入权重随机性导致学习效果不稳定的问题。coselm算法能够根据预测误差的最小方差来 自适应更新单个oselm算法所占的权重系数,发挥和权衡各个模型的优势,克服了等权平 均法中单项模型对于预测结果贡献相同的缺点。针对辅助动力装置传感器故障诊断和故障信 号重构问题,设计的基于coselm算法的发动机辅助动力装置控制系统传感器解析余度方法, 可以有效的识别传感器故障并在线重构传感器信号,适用于不同辅助动力装置个体,为航空 发动机控制系统安全可靠的运行提供保障。
[0148]
需要指出的是,以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限 于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化和替 换,都应涵盖在本发明的保护范围内。因此,本发明的保护范围应以所述权利要求的保护范 围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。