1.本实发明属于扫描仪平台,进一步包括视觉识别数据采集装置, 姿态估计的目标是在图像中描绘出被测物体的姿态信息,这是一种多方面任务,其中包含了前期数据采集、目标检测、姿态估计、分割等等。
2.本实发明主要解决工业品、农产品物体姿态数据采集,采集的数据将用于人工智能的深度学习训练。
背景技术:
3.提供密集的ai数据采集能力,可提供工业品、农产品等在内的多种数据采集,高效地解决物品视觉姿态识别模型算法的数据来源问题。
4.传统工业视觉halcon、opencv对物体姿态识别限制条件多、并且编程过程复杂。
5.本实发明提供一种新思路解决物体姿态识别问题,通过物体姿态扫描数据、ai数据训练、现场姿态识别的ai解决方案。
6.本实发明主要解决工业品、农产品物体姿态数据采集,采集的数据将用于人工智能的深度学习训练。
技术实现要素:
7.本实发明是一种人工智能自动物体姿态采集识别装置,其特征在于,所述装置包括水平旋转部(1)、第一电机(11)、第一电机固定部(6)、垂直旋转部(2)、第二驱动部固定块(22)、第二电机(21)、底座(4),垂直旋转部(2)包括第二旋转轴(23)、姿态采集器(31),水平旋转部(1)连接固定第一电机(11)的轴,垂直旋转部(2)连接固定第二电机(21)的轴,姿态采集器(31)连接固定垂直旋转部(2),第一电机(11)连接固定第一电机固定部(6),第一电机固定部(6)连接固定底座(4),第二电机(21)连接固定第二驱动部固定块(22),垂直旋转部(2)连接固定第二驱动部固定块(22),第二驱动部固定块(22)连接固定底座(4),水平旋转部(1)以水平旋转部(1)的旋转轴进行旋转,垂直旋转部(2)以第二旋转轴(23)进行旋转,第二旋转轴(23)与水平旋转部(1)的旋转面平行设置,第二旋转轴(23)的延长线与水平旋转部(1)的旋转轴的延长线相交,姿态采集器(31)的采集面与第二旋转轴(23)平行设置,姿态采集器(31)的采集面朝向水平旋转部(1)。
8.所述一种人工智能自动物体姿态采集识别装置,提供了一种水平旋转部(1)进行0
‑
360度旋转,垂直旋转部(2)进行0
‑
180度旋转的装置,同时满足水平旋转部(1)与垂直旋转部(2)联动旋转时相互间没有遮挡干扰。
9.本实发明所述一种人工智能自动物体姿态采集识别装置使用操作步骤如下:装置操作步骤1,放置被扫描物体,物体放置在水平旋转部(1)中心位置。
10.装置操作步骤1,设置姿态采集器(31)的参数。
11.装置操作步骤2,垂直旋转部(2)围绕第二旋转轴(23)旋转到垂直90度。
12.装置操作步骤3,水平旋转部(1)旋转到起始位置0度。
13.装置操作步骤4,姿态采集器(31)进行数据采集。
14.装置操作步骤5,水平旋转部(1)旋转一定角度。
15.装置操作步骤6,姿态采集器(31)进行数据采集。
16.装置操作步骤7,重复装置操作步骤5
‑
6,水平旋转部(1)完成0
‑
360度全部姿态采集器(31)的数据采集。
17.装置操作步骤8,垂直旋转部(2)围绕第二旋转轴(23)旋转一定角度。
18.装置操作步骤9,重复装置操作步骤7,直到垂直旋转部(2)完成0
‑
180度全部姿态采集器(31)的数据采集。
19.所述一种人工智能自动物体姿态采集识别装置,水平旋转部(1)具有水平旋转能力使用物体在水平方向0
‑
360旋转,提高了物体姿态数据采集密度和效率;垂直旋转部(2)具有垂直旋转能力使用姿态采集器(31)在垂直方向0
‑
180旋转,并且不会与水平旋转部(1)产生遮挡,工作时垂直旋转部(2)与水平旋转部(1)进行联动对物体姿态进行全方位的姿态数据采集,提高了物体姿态数据采集密度和效率。
20.所述一种人工智能自动物体姿态采集识别装置,具有对物体姿态的各个角度进行数据采集功能,同时物体只需一次定位完成全部姿态数据采集、提高采集数据精度、降低了生产成本。
21.且所述,姿态采集器(31)包括摄像头。
22.使用成熟性价比高的摄像头作为姿态采集器(31)。
23.且所述,姿态采集器(31)包括激光扫描仪。
24.使用激光扫描仪作为姿态采集器(31)获得点云数据,和物体尺寸数据。
25.且所述,垂直旋转部(2)包括照明系统(32)。
26.使用照明系统(32)解决不同颜色物体对照明颜色反射强弱问题,提高数据采集质量。
27.且所述,垂直旋转部(2)包括第一同步轮(27)连接皮带(28)、第二同步轮(29)。
28.所述第一同步轮(27)连接固定第二旋转部(24),第一同步轮(27)与第二旋转轴(23)同心设置,第一同步轮(27)连接皮带(28),第二同步轮(29)连接皮带(28),第二同步轮(29)连接第二电机(21)的轴。
29.所述一种人工智能自动物体姿态采集识别装置, 使第二旋转轴(23)与第二电机(21)错位安装,提高了垂直旋转部(2)运行的稳定性,节省装置空间。
30.且所述,垂直旋转部(2)包括配重块(26)、第二旋转部(24),配重块(26)包括固定在第二旋转部(24)的下端。
31.所述垂直旋转部(2)上重下轻,配重块(26)使垂直旋转部(2)两端重量平衡,垂直旋转部(2)运行时更平稳,节省装置空间。
32.且所述,水平旋转部(1)包括第一旋转中心(13)、第一旋转部(14)。
33.所述水平旋转部(1)连接固定第一旋转中心(13)、第一旋转中心(13)连接固定第一电机(11),将水平旋转部(1)结构拆成第一旋转中心(13)、第一旋转部(14)两部分有利于加工制造。
34.且所述,第一电机固定部(6)包括第一驱动部固定块(12)、第一驱动部高度调整块(15)。
35.所述第一电机(11)连接固定第一驱动部固定块(12)、第一驱动部固定块(12)连接固定第一驱动部高度调整块(15)、第一驱动部高度调整块(15)连接固定底座(4),将第一电机固定部(6)结构拆成第一驱动部固定块(12)、第一驱动部高度调整块(15)两部分有利于加工制造。
36.且所述,第一驱动部高度调整块(15)中包括设置多对不同高度的安装孔。
37.所述一种人工智能自动物体姿态采集识别装置,通过将第一驱动部固定块(12)固定在不同高度位置,达到调整水平旋转部(1)的高度,使被扫描物体的中心位置与第二旋转轴(23)对齐,达到提高被扫描物体的姿态扫描位置精度。
38.较佳地,所述装置包括采用铝材制成。
39.所述装置采用铝材制成降低装置重量。
40.本实发明装置采用铝材制造,具有夹紧牢靠,刚性强,使用灵活便于移动的特点。
41.本实发明装置用于物体姿态信息扫描,可以提高采集精度,扫描角度多,增加采集信息密度,减少劳动强度,有余力后期人工智能数据训练建模。
附图说明
42.在此描述的附图仅用于解释目的,而不意图以任何方式来限制本实发明公开的范围;另外,图中的各部件的形状和比例尺寸等仅为示意性的,用于帮助对本实发明的理解,并不是具体限定本实发明各部件的形状和比例尺寸;本领域的技术人员在本实发明的教导下,可以根据具体情况选择各种可能的形状和比例尺寸来实施本实发明。
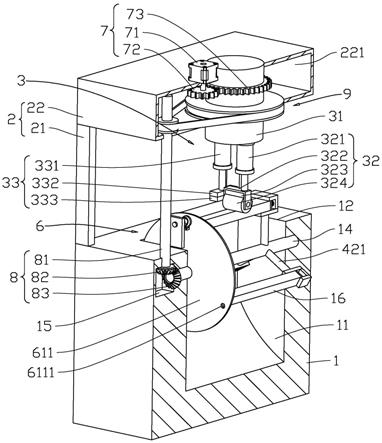
43.图1一种人工智能自动物体姿态采集识别装置的结构示意图。
44.图中:水平旋转部(1)、第一电机(11)、第一驱动部固定块(12)、第一旋转中心(13)、第一旋转部(14)、第一驱动部高度调整块(15)、垂直旋转部(2)、第二电机(21)、第二驱动部固定块(22)、第二旋转轴(23)、第二旋转部(24)、侧梁(25)、配重块(26)、第一同步轮(27)连接皮带(28)、第二同步轮(29)、姿态采集器(31)、照明系统(32)、底座(4)、第一电机固定部(6)。
具体实施方式
45.在此描述的本实发明的具体实施方式,仅用于解释本实发明的目的,而不能以任何方式理解成是对本实发明的限制。
46.请参考附图1,一种人工智能自动物体姿态采集识别装置,其特征在于,所述装置包括水平旋转部(1)、第一电机(11)、第一电机固定部(6)、垂直旋转部(2)、第二驱动部固定块(22)、第二电机(21)、底座(4),水平旋转部(1)包括第一旋转中心(13)、第一旋转部(14),第一电机固定部(6)包括第一驱动部固定块(12)、第一驱动部高度调整块(15),垂直旋转部(2)包括第二旋转轴(23)、第二旋转部(24)、侧梁(25)、配重块(26)、第一同步轮(27)连接皮带(28)、第二同步轮(29)、姿态采集器(31)、照明系统(32),水平旋转部(1)连接固定第一电机(11)的轴,垂直旋转部(2)连接固定第二电机(21)的轴,姿态采集器(31)连接固定垂直旋转部(2),第一电机(11)连接固定第一电机固定部(6),第一电机固定部(6)连接固定底座(4),第二电机(21)连接固定第二驱动部固定块(22),垂直旋转部(2)连接固定第二驱动部固定块(22),第二驱动部固定块(22)连接固定底座(4),水平旋转部(1)以水平旋转部(1)的
旋转轴进行旋转,垂直旋转部(2)以第二旋转轴(23)进行旋转,第二旋转轴(23)与水平旋转部(1)的旋转面平行设置,第二旋转轴(23)的延长线与水平旋转部(1)的旋转轴的延长线相交,姿态采集器(31)的采集面与第二旋转轴(23)平行设置,姿态采集器(31)的采集面朝向水平旋转部(1)。
47.所述姿态采集器(31)是摄像头。
48.所述第一驱动部高度调整块(15)中包括设置3对不同高度的安装孔。
49.所述第一同步轮(27)连接固定第二旋转部(24),第一同步轮(27)与第二旋转轴(23)同心设置,第一同步轮(27)连接皮带(28),第二同步轮(29)连接皮带(28),第二同步轮(29)连接第二电机(21)的轴。
50.所述水平旋转部(1)连接固定第一旋转中心(13)、第一旋转中心(13)连接固定第一电机(11),将水平旋转部(1)结构拆成第一旋转中心(13)、第一旋转部(14)两部分有利于加工制造。
51.所述第一电机(11)连接固定第一驱动部固定块(12)、第一驱动部固定块(12)连接固定第一驱动部高度调整块(15)、第一驱动部高度调整块(15)连接固定底座(4),将第一电机固定部(6)结构拆成第一驱动部固定块(12)、第一驱动部高度调整块(15)两部分有利于加工制造。
52.所述一种人工智能自动物体姿态采集识别装置,通过将第一驱动部固定块(12)固定在不同高度位置,达到调整水平旋转部(1)的高度,使被扫描物体的中心位置与第二旋转轴(23)对齐,达到提高被扫描物体的姿态扫描位置精度。
53.所述装置包括采用铝材制成。
54.本实发明所述一种人工智能自动物体姿态采集识别装置使用操作步骤如下:装置操作步骤1,放置被扫描物体,被扫描物体放置在第一旋转部(14)中心位置。
55.装置操作步骤2,调整中心高度,调整第一驱动部固定块(12)在第一驱动部高度调整块(15)的位置,使被扫描物体的中心与第二旋转轴(23)平齐。
56.装置操作步骤3,设置摄像头,设置姿态采集器(31)的摄像头。
57.装置操作步骤4,设置照明光线,设置照明系统(32)的颜色和亮度。
58.装置操作步骤5,垂直旋转部(2)围绕第二旋转轴(23)旋转到垂直90度。
59.装置操作步骤6,水平旋转部(1)旋转到起始位置0度。
60.装置操作步骤7,姿态采集器(31)进行数据采集。
61.装置操作步骤8,水平旋转部(1)每次旋转1度,每次进行数据采集,,水平旋转部(1)完成0
‑
360度全部姿态采集器(31)的数据采集。
62.装置操作步骤9,垂直旋转部(2)围绕第二旋转轴(23)每次旋转1度。
63.装置操作步骤10,重复装置操作步骤9,直到垂直旋转部(2)完成0
‑
180度全部姿态采集器(31)的数据采集。
64.装置操作步骤11,约获得180*360=64800张照片,每张照片带有位置姿态信息保存到终端。
65.所述一种人工智能自动物体姿态采集识别装置,水平旋转部(1)具有水平旋转能力使用物体在水平方向0
‑
360旋转,提高了物体姿态数据采集密度和效率;垂直旋转部(2)
具有垂直旋转能力使用姿态采集器(31)在垂直方向0
‑
180旋转,并且不会与水平旋转部(1)产生遮挡,工作时垂直旋转部(2)与水平旋转部(1)进行联动对物体姿态进行全方位的姿态数据采集,提高了物体姿态数据采集密度和效率。
66.所述一种人工智能自动物体姿态采集识别装置,具有对物体姿态的各个角度进行数据采集功能,同时物体只需一次定位完成全部姿态数据采集、提高采集数据精度、降低了生产成本。
67.本实发明装置采用铝材制造,具有夹紧牢靠,刚性强,使用灵活便于移动的特点。
68.本实发明装置用于物体姿态信息扫描,可以提高采集精度,扫描角度多,增加采集信息密度,减少劳动强度,有余力后期人工智能数据训练建模。
69.以上对本实发明所提供的一种人工智能自动物体姿态采集识别装置进行了详细介绍;本文中应用了具体个例对本实发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实发明的方法及其核心思想;应当指出,对于本技术领域的普通技术人员来说,在不脱离本实发明原理的前提下,还能对本实发明进行若干改进和修饰,这些改进和修饰也落入本实发明权利要求的保护范围内。
70.在本实发明的描述中,需要理解的是,术语“第一”、“第二”、“第三”、“水平”、“垂直”、“中间”、“中”类仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量、或者位置、或者顺序关系;由此,限定有“第一”、“第二”、“第三”、“水平”、“垂直”、“中间”、“中”类的特征可以明示或者隐含地包括一个或者更多个该特征;在本实发明的描述中,“多个”、“若干个”的含义是两个或两个以上,除非另有明确具体的限定。
71.以上仅为本实发明的较佳实施例而已,并不用以限制本实发明,凡在本实发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。